v5.01.105 SDND105 – Choc d’un point matériel contre une paroi avec flambage plastique#
Résumé:
Ce test valide le comportement d’un obstacle de type choc avec flambage éventuel. La résolution a été réalisée avec l’opérateur DYNA_VIBRA en utilisant le mot clé FLAMBAGE (modélisations A, B, C et D) et avec l’opérateur DYNA_NON_LINE en utilisant le comportement CHOC_ENDO_PENA (modélisations E et F).
On calcule l’instant de début de flambage (cet instant correspond au premier instant où la force de choc a dépassé le seuil de flambage), la déformation plastique cumulée et l’instant où l’on revient à la position initiale.
Les résultats obtenus sont en accord avec les résultats analytiques.
Solution de référence#
Méthode de calcul#
Le problème consiste à analyser la réponse d’une masse mobile soumise à une vitesse initiale non nulle et venant choquer contre une paroi qui suit une loi de comportement de type flambage.
L’équation d’équilibre du système s’écrit:
La résolution de se déroule en plusieurs phases: avant flambage de la paroi, chargement après flambage, déchargement après flambage et vol libre.
Première phase#
Avant le flambage, la force de réaction vaut: \({F}_{\mathrm{ext}}=-{K}_{1}x\)
La solution de l’équation se met sous la forme suivante: \(x(t)={A}_{1}\sin{\omega}_{1}t+{B}_{1}\cos{\omega}_{1}t\)
Avec: \({\omega}_{1}^{2}=\frac{K+{K}_{1}}{M}\)
En tenant compte des conditions initiales: \(x(0)=0\) et \(\frac{\partial x}{\partial t}(0)={v}_{0}\)
On identifie: \({A}_{1}=\frac{{v}_{0}}{{\omega}_{1}}\) et \({B}_{1}=0\)
Soit: \(x(t)=\frac{{v}_{0}}{{\omega}_{1}}\sin{\omega}_{1}t\)
On atteint le seuil limite de flambage \({F}_{\mathrm{fl}}\) à l’instant \({t}_{\mathrm{fl}}\) , tel que: \(x({t}_{\mathrm{fl}})={d}_{\mathrm{fl}}=\frac{{F}_{\mathrm{fl}}}{{K}_{1}}\) .
D’où: \({t}_{\mathrm{fl}}=\frac{1}{{\omega}_{1}}\mathrm{Arc}\sin(\frac{{F}_{\mathrm{fl}}{\omega}_{1}}{{K}_{1}{v}_{0}})\)
et \(\frac{\partial x}{\partial t}({t}_{\mathrm{fl}})={v}_{\mathrm{fl}}\)
Deuxième phase#
La phase suivante est la phase de chargement après flambage ; la force de réaction est constante tant que la vitesse reste positive. Cette force de réaction vaut: \({F}_{\mathrm{ext}}=-{F}_{\mathrm{seuil}}\) et la solution de l’équation s’écrit: \(x(t)={A}_{2}\sin{\omega}_{0}t+{B}_{2}\cos{\omega}_{0}t-\frac{{F}_{\mathrm{seuil}}}{M{\omega}_{0}^{2}}\)
Avec: \({\omega}_{0}^{2}=\frac{K}{M}\)
Comme \({\omega}_{0}^{2}\ll 1\) , on peut effectuer un développement limité des fonctions trigonométriques.
Soit: \(x(t)={A}_{21}{t}^{2}+{B}_{21}t+{C}_{21}\) .
En tenant compte des conditions initiales \(x({t}_{\mathrm{fl}})={d}_{\mathrm{fl}}\) et \(\frac{\partial x}{\partial t}({t}_{\mathrm{fl}})={v}_{\mathrm{fl}}\) , on obtient:
\({A}_{21}=(\frac{{v}_{\mathrm{fl}}{t}_{\mathrm{fl}}}{2}-\frac{{d}_{\mathrm{fl}}}{2}-\frac{{F}_{\mathrm{seuil}}^{2}}{4M}){\omega}_{0}^{2}-\frac{{F}_{\mathrm{seuil}}}{2M}\)
\({B}_{21}={v}_{\mathrm{fl}}+\frac{{F}_{\mathrm{seuil}}{t}_{\mathrm{fl}}}{M}+({d}_{\mathrm{fl}}{t}_{\mathrm{fl}}-\frac{{v}_{\mathrm{fl}}{t}_{\mathrm{fl}}^{2}}{2}){\omega}_{0}^{2}\)
\({C}_{21}={d}_{\mathrm{fl}}-\frac{{F}_{\mathrm{seuil}}{t}_{\mathrm{fl}}^{2}}{2M}-{v}_{\mathrm{fl}}{t}_{\mathrm{fl}}-\frac{{d}_{\mathrm{fl}}{t}_{\mathrm{fl}}^{2}}{2}{\omega}_{0}^{2}\)
L’instant auquel la vitesse s’annule est: \({t}_{m}=-\frac{{B}_{21}}{2{A}_{21}}\)
En négligeant les termes en \({\omega}_{0}^{2}\) , on déduit: \({t}_{m}={t}_{\mathrm{fl}}+\frac{M{v}_{\mathrm{fl}}}{{F}_{\mathrm{seuil}}}\) ,
et le déplacement maximal vaut: \(x({t}_{m})={d}_{m}\)
Cela permet d’obtenir la déformation plastique cumulée: \({d}_{p}={d}_{m}-\frac{{F}_{\mathrm{seuil}}}{{K}_{2}}\)
Troisième phase#
Cette phase correspond au déchargement, la force de réaction vaut: \({F}_{\mathrm{ext}}=-{K}_{2}(x-{d}_{p})\)
La solution de l’équation s’écrit: \(x(t)={A}_{3}\sin{\omega}_{2}t+{B}_{3}\cos{\omega}_{2}t+\frac{{K}_{2}{d}_{p}}{K+{K}_{2}}\)
Avec: \({\omega}_{2}^{2}=\frac{K+{K}_{2}}{M}\)
En tenant en compte des conditions initiales \(x({t}_{m})={d}_{m}\) et \(\frac{\partial x}{\partial t}({t}_{m})=0\) ,
on obtient: \({A}_{3}=({d}_{m}-\frac{{K}_{2}{d}_{p}}{K+{K}_{2}})\sin{\omega}_{2}{t}_{m}\) et \({B}_{3}=({d}_{m}-\frac{{K}_{2}{d}_{p}}{K+{K}_{2}})\cos{\omega}_{2}{t}_{m}\) .
La force de réaction s’annule lorsque le déplacement du point matériel atteint la valeur de la déformation plastique cumulée \({d}_{p}\) .
Comme \(K\ll {K}_{2}\) , on fait l’approximation suivante: \(\frac{{K}_{2}{d}_{p}}{K+{K}_{2}}\approx {d}_{p}\) .
Ainsi, l’instant \({t}_{d}\) qui correspond à l’annulation de la force de réaction est tel que:
\(x({t}_{d})={d}_{p}={A}_{3}\sin{\omega}_{2}{t}_{d}+{B}_{3}\cos{\omega}_{2}{t}_{d}+{d}_{p}\)
Soit: \(\sin{\omega}_{2}{t}_{m}\sin{\omega}_{2}{t}_{d}+\cos{\omega}_{2}{t}_{m}\cos{\omega}_{2}{t}_{d}=\cos{\omega}_{2}({t}_{d}-{t}_{m})=0\) .
D’où: \({t}_{d}={t}_{m}+\frac{\pi}{2{\omega}_{2}}\) .
Quatrième phase#
La phase suivante correspond à la phase de vol libre \({F}_{\mathrm{ext}}=0\) .
La solution de l’équation s’écrit: \(x(t)={A}_{4}\sin{\omega}_{0}t+{B}_{4}\cos{\omega}_{0}t\)
Les conditions initiales sont:
\(x({t}_{d})={d}_{p}\) et \(\frac{\partial x}{\partial t}({t}_{d})={v}_{d}={\omega}_{2}({x}_{m}-\frac{{K}_{2}{d}_{p}}{K+{K}_{2}})\sin{\omega}_{2}({t}_{m}-{t}_{d})\)
Ce qui donne:
\({A}_{4}={d}_{p}\sin{\omega}_{0}{t}_{d}+\frac{{v}_{d}}{{\omega}_{0}}\cos{\omega}_{0}{t}_{d}\)
\({B}_{4}={d}_{p}\cos{\omega}_{0}{t}_{d}-\frac{{v}_{d}}{{\omega}_{0}}\sin{\omega}_{0}{t}_{d}\)
Comme \({\omega}_{0}^{2}\ll 1\) , en effectuant un développement limité des fonctions trigonométriques jusqu’à l’ordre 2, la solution se met sous la forme suivante:
\(x(t)={A}_{41}{t}^{2}+{B}_{41}t+{C}_{41}\)
Avec:
\({A}_{41}=\frac{{\omega}_{0}^{2}}{2}[{v}_{d}{t}_{d}-{d}_{p}(1-\frac{{\omega}_{0}^{2}{t}_{d}^{2}}{2})]\)
\({B}_{41}={d}_{p}{t}_{d}{\omega}_{0}^{2}+{v}_{d}(1-\frac{{\omega}_{0}^{2}{t}_{d}^{2}}{2})\)
\({C}_{41}={d}_{p}(1-\frac{{\omega}_{0}^{2}{t}_{d}^{2}}{2})-{v}_{d}{t}_{d}\)
En négligeant les termes en \({\omega}_{0}^{2}\) , on obtient:
\(x(t)={v}_{d}t+{d}_{p}-{v}_{d}{t}_{d}\) .
Et on déduit l’instant \({t}_{0}\) de passage à la position initiale (\(x=0\) ).
Soit: \({t}_{0}={t}_{d}-\frac{{d}_{p}}{{v}_{d}}\) .
Solution de référence de la modélisation C#
Les conditions initiales choisies permettent d’avoir une énergie cinétique de \(4J\) , qui doit conduire à une compression totale de \(6.5m\) et une compression résiduelle de \(3.1m\) .
Grandeurs et résultats de référence#
Pour les modélisations A et B
On se propose de tester les grandeurs suivantes:
\({t}_{\mathrm{fl}}\) : instant de début de flambage;
\({d}_{p}\) : déformation plastique cumulée;
\({t}_{0}\) : instant de repassage à la position initiale (après flambage et décharge).
Compte tenu des valeurs numériques des données d’entrée, on obtient:
\({t}_{\mathrm{fl}}=\frac{\pi}{6}\) (exprimé en secondes)
\({d}_{p}=3\) (exprimée en mètres)
\({t}_{0}=\frac{\pi}{6}+2\sqrt{3}+\frac{\pi +6}{\sqrt{2}}\) (exprimé en secondes)
Pour la modélisation C
Compression maximale \(max(d)=6.5\) (exprimée en mètres)
Compression résiduelle \({d}_{p}=3.1\) (exprimée en mètres)
Vitesse de rebond après le choc \({V}_{\mathit{rebond}}=-1.303840481\) (exprimée en mètres par seconde)
Pour la modélisation D
La non régression est testée sans valeur de référence analytique.
Incertitudes sur la solution#
La solution de référence est analytique (au second ordre près).
Modélisation A#
Caractéristiques de la modélisation#
On modélise le système avec un point matériel et un obstacle de type PLAN_Y.
On évalue les grandeurs obtenues suite au flambage dû au choc en utilisant le mot clé FLAMBAGE de l’opérateur DYNA_VIBRA.
On vérifie également les différentes méthodes de résolution (EULER, ADAPT_ORDRE2 et DEVOGE). Avec le schéma en temps adaptatif ADAPT_ORDRE2 on définit (en secondes):
le pas de temps initial: PAS = 0.0002,
la valeur maximale du pas de temps: PAS_MAXI = 0.001,
la valeur minimale du pas de temps: PAS_MINI = 2.E-8.
Caractéristiques du maillage#
Nombre de nœuds: 2
Nombre de maille: 1 SEG2
Grandeurs testées et résultats#
On teste les valeurs des grandeurs liées au flambage de la paroi.
Identification |
Référence |
T ype de référence |
Précision |
\({t}_{\mathit{fl}}\) |
\(\frac{\pi}{6}s\) |
’ANALYTIQUE’ |
0.1% |
\({d}_{p}\) |
3 m |
’ANALYTIQUE’ |
0.1% |
\(x({t}_{0})=x(\frac{\pi}{6}+2\sqrt{3}+\frac{\pi +6}{\sqrt{2}})\) |
0 m |
’ANALYTIQUE’ |
3.E-3 m |
Modélisation B#
Caractéristiques de la modélisation#
Pour cette modélisation, on considère deux points matériels mobiles selon le schéma suivant:
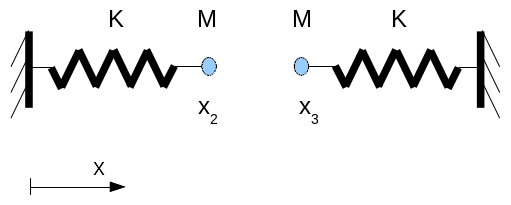
Le système est parfaitement symétrique. On obtient la même formulation que la modélisation A si on choisit des rigidités normales de choc égales à la moitié des rigidités choisies pour la modélisation A.
En effet, si on note: \({x}_{2}=-{x}_{3}=x\)
La force de réaction \({F}_{\mathrm{ext}}\) se met sous la forme suivante:
Pendant la première phase: \({F}_{\mathrm{ext}}=-{K}_{1}({x}_{2}-{x}_{3})=-2{K}_{1}x\)
Pendant la deuxième phase: \({F}_{\mathrm{ext}}=-{F}_{\mathrm{seuil}}\)
Pendant la troisième phase: \({F}_{\mathrm{ext}}=-{K}_{2}({x}_{2}-{x}_{3}-2{d}_{p})=-2{K}_{2}(x-{d}_{p})\)
Pendant la quatrième phase: \({F}_{\mathrm{ext}}=0\)
On modélise le problème avec un obstacle de type BI_PLAN_Y.
À l’instant initial, les deux points matériels sont en contact avec une vitesse initiale égale à \(2m/s\) .
On évalue les grandeurs obtenues suite au flambage dû au choc en utilisant le mot clé FLAMBAGE de l’opérateur DYNA_VIBRA, avec les schémas en temps EULER et ADAPT_ORDRE2.
Avec le schéma en temps adaptatif ADAPT_ORDRE2, on définit (en secondes):
le pas de temps initial: PAS = 0.001,
la valeur maximale du pas de temps: PAS_MAXI = 0.005.
Caractéristiques du maillage#
Nombre de nœuds: 4
Nombre de mailles: 2 SEG2
Grandeurs testées et résultats#
On teste les valeurs des grandeurs liées au comportement de flambage pendant le choc.
Identification |
Référence |
T ype de référence |
Précision |
\({t}_{\mathrm{fl}}\) |
\(\frac{\pi}{6}s\) |
’ANALYTIQUE’ |
0.01% |
\({d}_{p}\) |
3 m |
’ANALYTIQUE’ |
0.01% |
\(x({t}_{0})=x(\frac{\pi}{6}+2\sqrt{3}+\frac{\pi +6}{\sqrt{2}})\) |
0 m |
’ANALYTIQUE’ |
1.E-4m |
Modélisations C et D#
Caractéristiques des modélisations#
Dans ces modélisations on réutilise la modélisation A pour tester une forme plus complexe de la loi de flambage. La modélisation C est sans amortissement de choc, alors que pour la modélisation D un amortissement est ajouté.
On modélise le système avec un point matériel et un obstacle de type PLAN_Y.
On évalue les grandeurs obtenues suite au flambage dû au choc en utilisant le mot clé FLAMBAGE de l’opérateur DYNA_VIBRA.
On vérifie également les différentes méthodes de résolution (EULER, ADAPT_ORDRE2 et DEVOGE). Avec le schéma en temps adaptatif ADAPT_ORDRE2 on définit (en secondes):
le pas de temps initial: PAS = 0.0002,
la valeur maximale du pas de temps: PAS_MAXI = 0.001,
la valeur minimale du pas de temps: PAS_MINI = 2.E-8.
Caractéristiques du maillage#
Nombre de nœuds: 2
Nombre de maille: 1 SEG2
Grandeurs testées et résultats#
On teste les valeurs des grandeurs liées au flambage de la paroi.
Modélisation C:
Identification |
Référence |
T ype de référence |
Précision |
\(max(d)\) |
6.5 m |
’ANALYTIQUE’ |
0.01% |
\({d}_{p}\) |
3.1m |
’ANALYTIQUE’ |
0.01% |
\({V}_{\mathit{rebond}}\) |
-1.303840481m/s |
’ANALYTIQUE’ |
0.01% |
Modélisation D:
Identification |
Précision |
\({d}_{p}\) |
Non régression |
\({V}_{\mathit{rebond}}\) |
Non régression |
Modélisations E et F#
Caractéristiques des modélisations#
Dans ces modélisations on réutilise les modélisationsC et D mais on évalue les grandeurs obtenues suite au flambage dû au choc en utilisant le comportement CHOC_ENDO_PENA de l’opérateur DYNA_NON_LINE. La modélisation E est sans amortissement de choc, alors que pour la modélisation F un amortissement est ajouté.
On modélise le système avec un point matériel et un discret dont le matériau est DIS_CHOC_ENDO [U4.43.01] .
Caractéristiques du maillage#
Nombre de nœuds: 2
Nombre de maille: 1 SEG2
Grandeurs testées et résultats#
On teste les valeurs des grandeurs liées au flambage de la paroi.
Modélisation E:
Identification |
Référence |
T ype de référence |
Précision |
\(max(d)\) |
|
’ANALYTIQUE’ |
0.1% |
\({d}_{p}\) |
|
’ANALYTIQUE’ |
0.1% |
\({V}_{\mathit{rebond}}\) |
13.03840481m/s |
’ANALYTIQUE’ |
0.1% |
Modélisation F:
Identification |
Référence |
Aster |
Précision |
\(max(d)\) |
-5.50565597763881 m |
Non régression |
|
\({d}_{p}\) |
-2.54856258826116 m |
Non régression |
|
\({V}_{\mathit{rebond}}\) |
0.0999444607239 m/s |
Non régression |
Synthèse des résultats#
Les écarts entre les solutions obtenues avec Aster et les solutions analytiques sont très faibles.