r3.08.06 Éléments finis de tuyau droit et courbe avec ovalisation, gonflement et gauchissement en élasto-plasticité#
Résumé :
Ce document présente la modélisation d’un élément fini de tuyau utilisable dans des calculs de tuyauteries en élasticité ou en plasticité. Les tuyaux, courbes ou droits, peuvent être relativement épais (rapport épaisseur sur rayon de la section transverse jusqu’à \(0.2\) ) et sont soumis à divers chargements combinés - pression interne, flexions planes et anti-planes, torsion, extension - et peuvent avoir un comportement non linéaire.
Cet élément linéique combine à la fois des propriétés de coques et de poutres. La fibre moyenne du tuyau se comporte comme une poutre et la surface du tuyau comme une coque. L’élément réalisé est un élément de tuyau droit ou courbe en petites rotations et déformations, avec un comportement élasto-plastique en contraintes planes.
Trois modélisations, correspondant à trois différents types d’éléments, sont disponibles:
TUYAU_3M, qui prend en compte 3 modes de Fourier au maximum, et qui peuvent s’appuyer sur des mailles à 3 nœuds ou à 4 nœuds.
TUYAU_6M, qui prend en comte jusqu’à 6 modes de Fourier, et s’appuie sur des mailles à 3 nœuds.
Les différentes théories de coques et de poutres pour les éléments finis de tuyaux droits ou coudés#
On présente dans ce chapitre les éléments de cinématique en géométrie curviligne tridimensionnelle, ainsi que leurs restrictions dans le cadre des modèles de poutre et de coque. En effet, pour bâtir l’élément fini de tuyauterie enrichi qui répond au cahier des charges défini en introduction, on exploite une technique de décomposition de la cinématique tridimensionnelle. La cinématique de coque y apporte la description de l’ovalisation, du gonflement et du gauchissement, tandis que la cinématique de poutre y décrit le mouvement général de la ligne de tuyauterie.
Les différentes théories de coques et de poutres utilisées pour chacun des éléments traduisent les hypothèses choisies a priori sur le type de déformations et de comportements.
Le tuyau en théorie de poutre#
Cas d’un tuyau coudé#
Une première approche relativement simple revient à considérer le coude représenté ci-dessous comme une poutre creuse de section circulaire. La poutre est obtenue par rotation d’angle \(\Theta\) de la section circulaire autour de \(\mathit{OZ}\) . Un point de la poutre est repéré par sa distance \(r\) par rapport à l’axe de la poutre et par les deux angles \(\theta\) , \(\phi\) où \(\theta\) est l’angle longitudinal avec \(\mathit{OY}\) indiqué ci-dessus et \(\phi\) l’angle trigonométrique avec \(\mathit{OZ}\) mesuré sur la section circulaire.
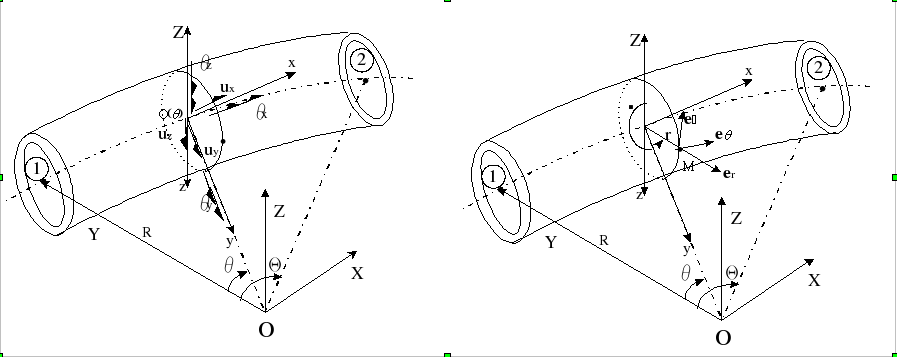
Figure 2.1.1-a: Géométrie et cinématique du coude en théorie de poutre
Dans le système de coordonnées curvilignes (\(r\) , \(\theta\) , \(\phi\) ), les relations entre les déplacements \(u\) des points du coude de position \({r}_{0}=\text{OM}=-\text{R}{e}_{y}(\theta )+r{e}_{r}(\theta ,\phi )\) et les déformations de Green‑Lagrange sont données par le tenseur suivant dans la base naturelle (\(r\) , \(\theta\) , \(\phi\) ):
\(2{f}_{\alpha \beta }=\frac{\partial ({r}_{0}+u)}{\partial \alpha }.\frac{\partial ({r}_{0}+u)}{\partial \beta }-\frac{\partial {r}_{0}}{\partial \alpha }.\frac{\partial {r}_{0}}{\partial \beta }\) , \((\alpha ,\beta )\in \left\lbrace r,\theta ,\phi \right\rbrace\) .
Les vecteurs unités dans les directions (\(r\) , \(\theta\) , \(\phi\) ) sont:
\({e}_{r}=\frac{\partial {r}_{0}}{\partial r},{e}_{\theta}=\frac{1}{A}\frac{\partial {r}_{0}}{\partial \theta },{e}_{\phi }=\frac{1}{B}\frac{\partial {r}_{0}}{\partial \phi }\) où \(A=\sqrt{\frac{\partial {r}_{0}}{\partial \theta }.\frac{\partial {r}_{0}}{\partial \theta }}\text{et}B=\sqrt{\frac{\partial {r}_{0}}{\partial \phi }.\frac{\partial {r}_{0}}{\partial \phi }}\) .
Si l’on exprime la position d’un point du coude dans la base orthonormée torique locale (\({e}_{r},{e}_{\theta},{e}_{\phi }\) ) par (\({y}_{r},{y}_{\theta},{y}_{\phi }\) ) on a les relations suivantes:
\({e}_{r}=\frac{\partial {r}_{0}}{\partial {y}_{r}},{e}_{\theta}=\frac{\partial {r}_{0}}{\partial {y}_{\theta}},{e}_{\phi }=\frac{\partial {r}_{0}}{\partial {y}_{\phi }}\) .
L’expression du tenseur des déformations de Green-Lagrange dans cette base est alors:
\(2{\varepsilon}_{\alpha \beta }=\frac{\partial ({r}_{0}+u)}{\partial {y}_{\alpha}}.\frac{\partial ({r}_{0}+u)}{\partial {y}_{\beta}}-\frac{\partial {r}_{0}}{\partial {y}_{\alpha}}.\frac{\partial {r}_{0}}{\partial {y}_{\beta}}\) .
Les relations de passage entre l’expression des déformations de Green-Lagrange dans le système de coordonnées curviligne et dans la base torique locale précédemment définie sont:
\(\begin{array}{}{\varepsilon}_{\text{rr}}={f}_{\text{rr}}\\ {\varepsilon}_{\theta \theta }=\frac{{f}_{\theta \theta }}{{A}^{2}}\\ {\varepsilon}_{\phi \phi }=\frac{{f}_{\phi \phi }}{{B}^{2}}\\ {\varepsilon}_{\theta \phi }=\frac{{f}_{\theta \phi }}{\text{AB}}\\ {\varepsilon}_{\theta r}=\frac{{f}_{\theta r}}{A}\\ {\varepsilon}_{\phi r}=\frac{{f}_{\phi r}}{B}\end{array}\)
L’utilisation de cette base est particulièrement intéressante car les relations de comportement dans la base torique orthonormée sont simples d’utilisation. Pour le coude ci dessus, si l’on considère que les déformations restent petites, on obtient alors [bib4] après linéarisation des déformations de Green‑Lagrange:
\(\begin{array}{}{\varepsilon}_{\mathrm{rr}}=\frac{\partial {u}_{r}}{\partial r}\\ {\varepsilon}_{\theta \theta }=\frac{1}{A}\frac{\partial {u}_{\theta}}{\partial \theta }+\frac{{u}_{\phi }}{\text{AB}}\frac{\partial A}{\partial \phi }+\frac{{u}_{r}}{{R}_{\theta}}\\ {\varepsilon}_{\phi \phi }=\frac{1}{B}\frac{\partial {u}_{\phi }}{\partial \phi }+\frac{{u}_{r}}{{R}_{\phi }}\\ 2{\varepsilon}_{\theta \phi }={\gamma}_{\theta \phi }=\frac{1}{B}\frac{\partial {u}_{\theta}}{\partial \phi }+\frac{1}{A}\frac{\partial {u}_{\phi }}{\partial \theta }-\frac{{u}_{\theta}}{\text{AB}}\frac{\partial A}{\partial \phi }\\ 2{\varepsilon}_{\theta r}={\gamma}_{\theta r}=\frac{1}{A}\frac{\partial {u}_{r}}{\partial \theta }-\frac{{u}_{\theta}}{{R}_{\theta}}+\frac{\partial {u}_{\theta}}{\partial r}\\ 2{\varepsilon}_{\phi r}={\gamma}_{\phi r}=\frac{1}{B}\frac{\partial {u}_{r}}{\partial \phi }-\frac{{u}_{\phi }}{{R}_{\phi }}+\frac{\partial {u}_{\phi }}{\partial r}\end{array}\)
avec:
\(A=R+r\sin\phi ,B=r,{R}_{\theta}=\frac{R+r\sin\phi }{\sin\phi },{R}_{\phi }=r\)
Les expressions des déformations établies ci-dessus s’écrivent alors:
\(\begin{array}{}{\varepsilon}_{\mathrm{rr}}=\frac{\partial {u}_{r}}{\partial r}\\ {\varepsilon}_{\theta \theta }=\frac{1}{R+r\sin\phi }(\frac{\partial {u}_{\theta}}{\partial \theta }+{u}_{\phi }\cos\phi +{u}_{r}\sin\phi )\\ {\varepsilon}_{\phi \phi }=\frac{1}{r}(\frac{\partial {u}_{\phi }}{\partial \phi }+{u}_{r})\\ 2{\varepsilon}_{\theta \phi }={\gamma}_{\theta \phi }=\frac{1}{R+r\sin\phi }(\frac{\partial {u}_{\phi }}{\partial \theta }-{u}_{\theta}\cos\phi )+\frac{1}{r}\frac{\partial {u}_{\theta}}{\partial \phi }\\ 2{\varepsilon}_{r\theta }={\gamma}_{r\theta }=\frac{1}{R+r\sin\phi }(\frac{\partial {u}_{r}}{\partial \theta }-{u}_{\theta}\sin\phi )+\frac{\partial {u}_{\theta}}{\partial r}\\ 2{\varepsilon}_{r\phi }={\gamma}_{r\phi }=\frac{1}{r}(\frac{\partial {u}_{r}}{\partial \phi }-{u}_{\phi })+\frac{\partial {u}_{\phi }}{\partial r}\end{array}\)
Le déplacement \({u}_{r},{u}_{\theta},{u}_{\phi }\) , d’un point du coude dans la base torique associée à la section transverse d’observation peut facilement s’exprimer en fonction des déplacements et des rotations associés au centre de la section transverse. En effet, si on note \({u}_{1},{u}_{2},{u}_{3}\) le déplacement dans la base curviligne locale \((o(\theta ),x(\theta ),y(\theta ),z(\theta ))\) associée à la section transverse comme indiqué sur la [Figure 2.1.1-a] on a les relations suivantes, valables dans le cadre de la cinématique des poutres de Timoshenko [R3.08.01]:
\(\begin{array}{}{u}_{1}(r,\theta ,\phi )={u}_{x}(\theta )+{\theta}_{z}(\theta )r\sin\phi -{\theta}_{y}(\theta )r\cos\phi \\ {u}_{2}(r,\theta ,\phi )={u}_{y}(\theta )+{\theta}_{x}(\theta )r\cos\phi \\ {u}_{3}(r,\theta ,\phi )={u}_{z}(\theta )-{\theta}_{x}(\theta )r\sin\phi \end{array}\)
où \({u}_{x},{u}_{y},{u}_{z}\) est le déplacement de translation de la section et \({\theta}_{x}\) , \({\theta}_{y}\) , \({\theta}_{z}\) la rotation de son centre \(o\) . L’expression des composantes du déplacement dans la base orthonormée torique locale (\({e}_{r},{e}_{\theta},{e}_{\phi }\) ) s’obtient par changement de repère:
\(\begin{array}{}{u}_{\theta}(r,\theta ,\phi )={u}_{1}(r,\theta ,\phi )={u}_{x}(\theta )+{\theta}_{z}(\theta )r\sin\phi -{\theta}_{y}(\theta )r\cos\phi \\ {u}_{\phi }(r,\theta ,\phi )={u}_{3}(r,\theta ,\phi )\sin\phi -{u}_{2}(r,\theta ,\phi )\cos\phi ={u}_{z}(\theta )\sin\phi -{u}_{y}(\theta )\cos\phi -{\theta}_{x}(\theta )r\\ {u}_{r}(r,\theta ,\phi )=-[{u}_{3}(r,\theta ,\phi )\cos\phi +{u}_{2}(r,\theta ,\phi )\sin\phi ]=-[{u}_{z}(\theta )\cos\phi +{u}_{y}(\theta )\sin\phi ]\end{array}\)
L’introduction de ce champ de déplacement dans l’expression des déformations linéarisées nous permet d’obtenir l’expression des déformations tridimensionnelles associées à la cinématique de poutre:
\(\begin{array}{}{\varepsilon}_{\text{rr}}=0\\ {\varepsilon}_{\theta \theta }=\frac{1}{R+r\sin\phi }({u}_{x,\theta }-{u}_{y}-r{\theta}_{x}\cos\phi +{\theta}_{z,\theta }r\sin\phi -{\theta}_{y,\theta }r\cos\phi )\\ {\varepsilon}_{\phi \phi }=0\\ 2{\varepsilon}_{\theta \phi }=\frac{1}{R+r\sin\phi }(-{u}_{x}\cos\phi -{u}_{y,\theta }\cos\phi +{u}_{z,\theta }\sin\phi -r{\theta}_{x,\theta }+{\theta}_{y}r{\cos}^{2}\phi -{\theta}_{z}r\sin\phi \cos\phi )\\ +({\theta}_{z}\cos\phi +{\theta}_{y}\sin\phi )\\ 2{\varepsilon}_{r\theta }=\frac{1}{R+r\sin\phi }(-{u}_{x}\sin\phi -{u}_{y,\theta }\sin\phi -{u}_{z,\theta }\cos\phi +{\theta}_{y}r\sin\phi \cos\phi -{\theta}_{z}r{\sin}^{2}\phi )\\ +({\theta}_{z}\sin\phi -{\theta}_{y}\cos\phi )\\ 2{\varepsilon}_{r\phi }=0\end{array}\)
Cas du tuyau droit#
Les expressions des déformations établies ci-dessus s’appliquent aussi au cas du tuyau droit, où l’on remplace \(\theta\) par \(s\) où \(s\) est l’abscisse curviligne le long de la fibre moyenne du tuyau, avec:
\(A=1,B=r,1/{R}_{\theta}=0,{R}_{\phi }=r.\)
Les expressions données pour le coude s’écrivent alors pour le tuyau droit:
\(\begin{array}{}{\varepsilon}_{\text{rr}}=\frac{\partial {u}_{r}}{\partial r}\\ {\varepsilon}_{xx}=\frac{\partial {u}_{x}}{\partial x}\\ {\varepsilon}_{\phi \phi }=\frac{1}{r}(\frac{\partial {u}_{\phi }}{\partial \phi }+{u}_{r})\\ 2{\varepsilon}_{x\phi }={\gamma}_{x\phi }=\frac{\partial {u}_{\phi }}{\partial x}+\frac{1}{r}\frac{\partial {u}_{x}}{\partial \phi }\\ 2{\varepsilon}_{\text{rx}}={\gamma}_{\text{rx}}=\frac{\partial {u}_{r}}{\partial x}+\frac{\partial {u}_{x}}{\partial r}\\ 2{\varepsilon}_{r\phi }={\gamma}_{r\phi }=\frac{1}{r}(\frac{\partial {u}_{r}}{\partial \phi }-{u}_{\phi })+\frac{\partial {u}_{\phi }}{\partial r}\end{array}\)

Figure 2.1.2-a: Géométrie et cinématique d’un tuyau droit en théorie de poutre
Comme précédemment, le déplacement , \({u}_{r},{u}_{x},{u}_{\phi }\) d’un point du tuyau dans la base torique associée à la section transverse d’observation peut facilement s’exprimer en fonction des déplacements et des rotations associés au centre de la section transverse. En effet, si on note \({u}_{1},{u}_{2},{u}_{3}\) le déplacement dans la base curviligne locale \((o,x,y,z)\) associée à la section transverse comme indiqué sur la figure ci‑dessous on a les relations suivantes:
\(\begin{array}{}{u}_{1}(r,x,\phi )={u}_{x}(x)+{\theta}_{z}(x)r\sin\phi -{\theta}_{y}(x)r\cos\phi \\ {u}_{2}(r,x,\phi )={u}_{y}(x)+{\theta}_{x}(x)r\cos\phi \\ {u}_{3}(r,x,\phi )={u}_{z}(x)-{\theta}_{x}(x)r\sin\phi \end{array}\)
et:
\(\begin{array}{}{u}_{x}(r,x,\phi )={u}_{1}(r,x,\phi )={u}_{x}(x)+{\theta}_{z}(x)r\sin\phi -{\theta}_{y}(x)r\cos\phi \\ {u}_{\phi }(r,x,\phi )={u}_{3}(r,x,\phi )\sin\phi -{u}_{2}(r,x,\phi )\cos\phi ={u}_{z}(x)\sin\phi -{u}_{y}(x)\cos\phi -{\theta}_{x}(x)r\\ {u}_{r}(r,x,\phi )=-[{u}_{3}(r,x,\phi )\cos\phi +{u}_{2}(r,x,\phi )\sin\phi ]=-[{u}_{z}(x)\cos\phi +{u}_{y}(x)\sin\phi ]\end{array}\)
L’introduction de ce champ de déplacement dans l’expression des déformations données ci-dessous nous permet d’obtenir l’expression des déformations associées à la cinématique de poutre:
\(\begin{array}{}{\varepsilon}_{\mathrm{rr}}=0\\ {\varepsilon}_{xx}={u}_{x,x}+{\theta}_{z,x}r\sin\phi -{\theta}_{y,x}r\cos\phi \\ {\varepsilon}_{\phi \phi }=0\\ 2{\varepsilon}_{x\phi }=-r{\theta}_{x,x}+({\theta}_{y}+{u}_{z,x})\sin\phi +({\theta}_{z}-{u}_{y,x})\cos\phi \\ 2{\varepsilon}_{\text{rx}}=({\theta}_{z}-{u}_{y,x})\sin\phi -({\theta}_{y}+{u}_{z,x})\cos\phi \\ 2{\varepsilon}_{r\phi }=0\end{array}\)
Remarques#
Le fait que \({\varepsilon}_{\mathrm{rr}},{\varepsilon}_{\phi \phi }\text{et}{\varepsilon}_{r\phi }\) soient simultanément nuls montre que la cinématique de poutre ne peut représenter les déformations des sections transverses à la fibre moyenne du tuyau. En effet, les sections transverses sont animées d’un mouvement de corps rigide, ce qui interdit de modéliser le gauchissement, le gonflement et l’ovalisation.
Le tuyau en théorie linéarisée de coque#
Cas général#
Le tuyau coudé est considéré comme une coque mince de révolution (portion de tore). La surface moyenne est obtenue par rotation d’angle \(\Theta\) d’un cercle de rayon \(a\) dont le centre est à une distance \(R\) de l’axe de révolution \(\mathit{Oz}\) . On désigne par h l’épaisseur du coude. On impose à cette épaisseur de rester constante ainsi qu’à la section du coude d’être parfaitement circulaire. Un point sur la surface moyenne est caractérisé par les deux angles \(\theta ,\phi\) et sa position \(-h/2\le \zeta \le +h/2\) par rapport à la surface moyenne, où \(\theta\) est l’angle longitudinal, variant entre \(0\) et \(\Theta\) , et \(\phi\) l’angle mesuré sur la section transverse.
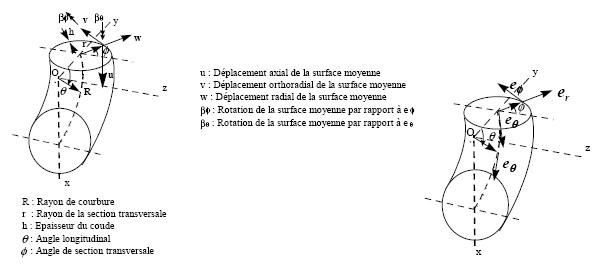
Figure 2.2.1-a: Géométrie et cinématique du coude en théorie de coque
On se place tout d’abord dans le cadre de la théorie linéarisée des coques avec cisaillement transverse telle qu’elle a été décrite par exemple dans Washizu [bib14]. Il limite notre étude au cadre des petites déformations. En outre, les grandes rotations de la surface moyenne ne sont pas prises en compte. Les déplacements et rotations sont ainsi définis par rapport à la géométrie initiale du coude. Si les déplacements des points de la surface moyenne dans les trois directions \(\theta\) axiale, \(\phi\) orthoradiale et \(\zeta\) radiale sont notés \(u,v\) et \(w\) ceux de n’importe quel point du coude s’écrivent de la manière suivante :
\(\begin{array}{}{u}_{\theta}=u(\theta ,\phi )+\zeta {\beta}_{\phi }(\theta ,\phi )\\ {u}_{\phi }=v(\theta ,\phi )-\zeta {\beta}_{\theta}(\theta ,\phi )\\ {u}_{\zeta}=w(\theta ,\phi )\end{array}\)
où \({\beta}_{\theta}\) et \({\beta}_{\phi }\) sont les rotations par rapport aux vecteurs \({e}_{\theta}\) et \({e}_{\phi }\) respectivement.
Les déformations en tout point sont ainsi données par [bib14]:
\(\begin{array}{}{\varepsilon}_{\theta \theta }=\frac{{E}_{\theta \theta }+\zeta {\kappa}_{\theta \theta }}{1+\zeta /{R}_{\theta}}\\ {\varepsilon}_{\phi \phi }=\frac{{E}_{\phi \phi }+\zeta {\kappa}_{\phi \phi }}{1+\zeta /{R}_{\phi }}\\ 2{\varepsilon}_{\theta \phi }={\gamma}_{\theta \phi }=\frac{2{E}_{\theta \phi }+2\zeta {\kappa}_{\theta \phi }}{(1+\zeta /{R}_{\theta})(1+\zeta /{R}_{\phi })}\\ 2{\varepsilon}_{\theta \zeta }={\gamma}_{\theta \zeta }=\frac{2{E}_{\theta \zeta }}{(1+\zeta /{R}_{\theta})}\\ 2{\varepsilon}_{\phi \zeta }={\gamma}_{\phi \zeta }=\frac{2{E}_{\phi \zeta }}{(1+\zeta /{R}_{\phi })}\end{array}\)
avec:
\(A=R+a\sin\phi ,B=a,{R}_{\theta}=\frac{R+a\sin\phi }{\sin\phi },{R}_{\phi }=a.\)
où \({E}_{\theta \theta },{E}_{\phi \phi }\) et \({E}_{\theta \phi }\) sont les déformations membranaires de la surface moyenne, \({\kappa}_{\theta \theta },{\kappa}_{\phi \phi },{\kappa}_{\theta \phi }\) les déformations de flexion de la surface moyenne et \({E}_{\theta \zeta },{E}_{\phi \zeta }\) les distorsions transverses. Les déformations de la surface moyenne sont reliées aux déplacements de la surface moyenne en remplaçant le champ de déplacement du paragraphe précédent par celui donné ci-dessus. On trouve alors:
\(\begin{array}{}{E}_{\theta \theta }=\frac{1}{A}\frac{\partial u}{\partial \theta }+\frac{v}{\text{AB}}\frac{\partial A}{\partial \phi }+\frac{w}{{R}_{\theta}}\\ {E}_{\phi \phi }=\frac{1}{B}\frac{\partial v}{\partial \phi }+\frac{w}{{R}_{\phi }}\\ 2{E}_{\theta \phi }=\frac{1}{B}\frac{\partial u}{\partial \phi }+\frac{1}{A}\frac{\partial v}{\partial \theta }-\frac{u}{\text{AB}}\frac{\partial A}{\partial \phi }\\ {\kappa}_{\theta \theta }=\frac{1}{A}\frac{\partial {\beta}_{\phi }}{\partial \theta }-\frac{{\beta}_{\theta}}{\text{AB}}\frac{\partial A}{\partial \phi }\\ {\kappa}_{\phi \phi }=-\frac{1}{B}\frac{\partial {\beta}_{\theta}}{\partial \phi }\\ 2{\kappa}_{\theta \phi }=\frac{1}{B}\frac{\partial {\beta}_{\phi }}{\partial \phi }-\frac{{\beta}_{\phi }}{\text{AB}}\frac{\partial A}{\partial \phi }-\frac{1}{A}\frac{\partial {\beta}_{\theta}}{\partial \theta }+[\frac{1}{{R}_{\theta}}\frac{1}{B}\frac{\partial u}{\partial \phi }+\frac{1}{{R}_{\phi }}(\frac{1}{A}\frac{\partial v}{\partial \theta }-\frac{u}{\text{AB}}\frac{\partial A}{\partial \phi })]\\ 2{E}_{\theta \zeta }={\beta}_{\phi }+\frac{1}{A}\frac{\partial w}{\partial \theta }-\frac{u}{{R}_{\theta}}\\ 2{E}_{\phi \zeta }=-{\beta}_{\theta}+\frac{1}{B}\frac{\partial w}{\partial \phi }-\frac{v}{{R}_{\phi }}\end{array}\)
Soit encore :
\(\begin{array}{}{E}_{\theta \theta }=\frac{1}{R+a\sin\phi }(\frac{\partial u}{\partial \theta }+v\cos\phi +w\sin\phi )\\ {E}_{\phi \phi }=\frac{1}{a}(\frac{\partial v}{\partial \phi }+w)\\ {\gamma}_{\theta \phi }=\frac{1}{R+a\sin\phi }(\frac{\partial v}{\partial \theta }-u\cos\phi )+\frac{1}{a}\frac{\partial u}{\partial \phi }\\ {\kappa}_{\theta \theta }=\frac{1}{R+a\sin\phi }(\frac{\partial {\beta}_{\phi }}{\partial \theta }-{\beta}_{\theta}\cos\phi )\\ {\kappa}_{\phi \phi }=-\frac{1}{a}\frac{\partial {\beta}_{\theta}}{\partial \phi }\\ {\kappa}_{\theta \phi }=\frac{1}{a}\frac{\partial {\beta}_{\phi }}{\partial \phi }-\frac{1}{R+a\sin\phi }(\frac{\partial {\beta}_{\theta}}{\partial \theta }+{\beta}_{\phi }\cos\phi )+[\frac{\sin\phi }{R+a\sin\phi }\frac{1}{a}\frac{\partial u}{\partial \phi }+\frac{1}{R+a\sin\phi }\frac{1}{a}(\frac{\partial v}{\partial \theta }-u\cos\phi )]\\ {\gamma}_{\theta \zeta }={\beta}_{\phi }+\frac{1}{R+a\sin\phi }(\frac{\partial w}{\partial \theta }-u\sin\phi )\\ {\gamma}_{\phi \zeta }=-{\beta}_{\theta}+\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
Dans cette théorie il y a donc cinq inconnues; 3 déplacements \(u,v\) et \(w\) ainsi que deux rotations \({\beta}_{\theta},{\beta}_{\phi }\) . Si l’hypothèse de Love-Kirchhoff est appliquée (tube mince) les cisaillements transverses sont nuls et il n’y a plus que les 3 déplacements \(u,v\) et \(w\) puisque:
\(\begin{array}{}{\beta}_{\phi }=-\frac{1}{R+a\sin\phi }(\frac{\partial w}{\partial \theta }-u\sin\phi )\\ {\beta}_{\theta}=\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
Cas du tuyau droit#
Si l’on applique ces équations au cas du tuyau droit avec:
\(A=1,B=a,1/{R}_{\theta}=0,{R}_{\phi }=a.\)
On retrouve l’expression plus habituelle pour ce genre de géométrie:
\(\begin{array}{}{E}_{xx}=\frac{\partial u}{\partial x}\\ {E}_{\phi \phi }=\frac{1}{a}(\frac{\partial v}{\partial \phi }+w)\\ 2{E}_{x\phi }=\frac{\partial v}{\partial x}+\frac{1}{a}\frac{\partial u}{\partial \phi }\\ {\kappa}_{xx}=\frac{\partial {\beta}_{\phi }}{\partial x}\\ {\kappa}_{\phi \phi }=-\frac{1}{a}\frac{\partial {\beta}_{x}}{\partial \phi }\\ 2{\kappa}_{x\phi }=\frac{1}{a}\frac{\partial {\beta}_{\phi }}{\partial \phi }-\frac{\partial {\beta}_{x}}{\partial x}+[\frac{1}{a}\frac{\partial v}{\partial x}]\\ 2{E}_{x\zeta }={\beta}_{\phi }+\frac{\partial w}{\partial x}\\ 2{E}_{\phi \zeta }=-{\beta}_{x}+\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
Dans cette théorie il y a donc cinq inconnues; 3 déplacements \(u,v\) et \(w\) ainsi que deux rotations \({\beta}_{x},{\beta}_{\phi }\) . Si l’hypothèse de Love-Kirchhoff est appliquée (tube mince) les cisaillements transverses sont nuls et il n’y a plus que les 3 déplacements \(u,v\) et \(w\) puisque:
\(\begin{array}{}{\beta}_{\phi }=-\frac{\partial w}{\partial x}\\ {\beta}_{x}=\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
Remarque#
On peut introduire directement la cinématique de coque dans le champ de déformation 3D. Dans ce cas on a:
\(\begin{array}{}{\varepsilon}_{\theta \theta }={E}_{\theta \theta }+\zeta {\kappa}_{\theta \theta }\\ {\varepsilon}_{\phi \phi }={E}_{\phi \phi }+\zeta {\kappa}_{\phi \phi }\\ 2{\varepsilon}_{\theta \phi }={\gamma}_{\theta \phi }=2{E}_{\theta \phi }+2\zeta {\kappa}_{\theta \phi }\\ 2{\varepsilon}_{\theta \zeta }={\gamma}_{\theta \zeta }=2{E}_{\theta \zeta }\\ 2{\varepsilon}_{\phi \zeta }={\gamma}_{\phi \zeta }=2{E}_{\phi \zeta }\end{array}\)
où les expressions \({E}_{\theta \theta },{E}_{\phi \phi }\) et \({E}_{\theta \phi }\) pour les déformations membranaires, \({\kappa}_{\theta \theta },{\kappa}_{\phi \phi },{\kappa}_{\theta \phi }\) pour les déformations de flexion et \({E}_{\theta \zeta },{E}_{\phi \zeta }\) pour les distorsions transverses sont données par l’expression suivante dans le cas général:
\(\begin{array}{}{E}_{\theta \theta }=\frac{1}{R+r\sin\phi }(\frac{\partial u}{\partial \theta }+v\cos\phi +w\sin\phi )\\ {E}_{\phi \phi }=\frac{1}{r}(\frac{\partial v}{\partial \phi }+w)\\ 2{E}_{\theta \phi }=\frac{1}{r}\frac{\partial u}{\partial \phi }+\frac{1}{R+r\sin\phi }(\frac{\partial v}{\partial \theta }-u\cos\phi )\\ {\kappa}_{\theta \theta }=\frac{1}{R+r\sin\phi }(\frac{\partial {\beta}_{\phi }}{\partial \theta }-{\beta}_{\theta}\cos\phi )\\ {\kappa}_{\phi \phi }=-\frac{1}{r}\frac{\partial {\beta}_{\theta}}{\partial \phi }\\ 2{\kappa}_{\theta \phi }=\frac{1}{r}\frac{\partial {\beta}_{\phi }}{\partial \phi }-\frac{1}{R+r\sin\phi }(\frac{\partial {\beta}_{\theta}}{\partial \theta }+{\beta}_{\phi }\cos\phi )\\ 2{E}_{\theta \zeta }={\beta}_{\phi }\frac{R+a\sin\phi }{R+r\sin\phi }+\frac{1}{R+r\sin\phi }(\frac{\partial w}{\partial \theta }-u\sin\phi )\\ 2{E}_{\phi \zeta }=-{\beta}_{\theta}\frac{a}{r}+\frac{1}{r}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
On remarque qu’à l’ordre 1 en \(\zeta\) les deux façons de procéder donnent des résultats identiques. C’est la définition de la déformation de membrane ou de flexion qui change. Dans le premier cas elle est indépendante de la position dans l’épaisseur et est calculée pour le rayon moyen de la section transverse du tuyau, alors qu’elle en dépend dans le cas de l’approche 3D. Le terme entre crochet dans l’expression du [§2.2.1]. représente un couplage entre la flexion et la membrane qui apparaît lorsque l’on exprime \(R+r\sin\phi\) et \(r\) en fonction de \(R+a\sin\phi\) et \(a\) . Dans la suite de notre analyse nous utiliserons cette expression 3D dégénérée de la cinématique de coque.
Si en outre nous utilisons l’hypothèse de Love-Kirchhoff pour les cisaillements transverses, \({E}_{\theta \zeta }={E}_{\phi \zeta }=0\) on retrouve bien les expressions suivantes des rotations:
\(\begin{array}{}{\beta}_{\phi }=-\frac{1}{R+a\sin\phi }(\frac{\partial w}{\partial \theta }-u\sin\phi )\\ {\beta}_{\theta}=\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
et:
\(\begin{array}{}{\kappa}_{\theta \theta }=\frac{1}{R+r\sin\phi }[-\frac{1}{R+a\sin\phi }(\frac{{\partial}^{2}w}{\partial {\theta}^{2}}-\frac{\partial u}{\partial \theta }\sin\phi )-\frac{\cos\phi }{a}(\frac{\partial w}{\partial \phi }-v)]\\ {\kappa}_{\phi \phi }=-\frac{1}{\text{ar}}(\frac{{\partial}^{2}w}{\partial {\phi }^{2}}-\frac{\partial v}{\partial \phi })\\ 2{\kappa}_{\theta \phi }=(\frac{\partial w}{\partial \theta }-u\sin\phi )[\frac{\cos\phi }{(R+r\sin\phi )(R+a\sin\phi )}+\frac{a\cos\phi }{r(R+a\sin\phi {)}^{2}}]\\ -\frac{{\partial}^{2}w}{\partial \theta \partial \phi }[\frac{1}{a(R+r\sin\phi )}+\frac{1}{r(R+a\sin\phi )}]\\ +\frac{\partial v}{\partial \theta }\frac{1}{a(R+r\sin\phi )}+(\frac{\partial u}{\partial \phi }\sin\phi +u\cos\phi )\frac{1}{r(R+a\sin\phi )}\end{array}\)
les expressions pour \({E}_{\theta \theta },{E}_{\phi \phi }\) et \({E}_{\theta \phi }\) restant inchangées.
On peut étendre aisément cette remarque au cas du tuyau droit.
Analyse des tuyaux droits et coudés#
En conclusion des deux analyses précédentes on peut modéliser le tuyau comme un élément de poutre dont la section est une coque mince. Cette interprétation est faite dans la plupart des codes ([bib2], [bib8], [bib9], [bib10], [bib12], etc…). En l’absence de gauchissement des sections transverses (i.e. les sections transverses restent planes) le déplacement axial de poutre donne la nouvelle position de la section transverse et les déplacements d’ovalisation (il suffit de prendre alors u=0 dans les équations de coques minces) permettent de savoir comment celle-ci se déforme. La déformation totale est obtenue comme superposition des déformations de poutre et des déformations d’ovalisation. Le champ de déplacement que l’on représente sur la figure ci-dessous s’écrit:
\(U={U}^{p}+{U}^{s}\) .
Dans le premier champ de déplacement l’image de la section transverse est une section transverse identique obtenue par translation et rotation de la première. Dans le second champ de déplacement, la section transverse est déformée.

Figure 2.3-a: Décomposition du déplacement en champs de poutre et de coque
La modélisation élément fini doit donc rendre compte de deux réponses mécaniques différentes: celle de la poutre et celle de la coque pour l’ovalisation, le gonflement et le gauchissement. Ces trois dernières modélisations font intervenir des degrés de liberté qui ne sont pas nodaux (décomposition en série de Fourier par exemple).
Eléments mixtes coque-poutre pour les tuyaux droits et courbes#
Cinématique#
On décompose le champ de déplacement en une partie macroscopique de «poutre» et une partie supplémentaire locale de «coque». \(V\) est l’espace utile des champs de déplacements tridimensionnels définis sur une section quelconque de tuyau.
Pour la partie poutre, comme en [R3.03.03], on introduit l’espace \(T\) des champs associés à un torseur (défini par deux vecteurs):
\(T=\left\lbrace v\in V/\exists (T,\Omega )\text{tel que}v(M)=T+\Omega \wedge \text{GM}\right\rbrace\)
Pour les champs de déplacement de \(T\) , \(T\) est la translation de la section (ou du point \(G\) ), \(\Omega\) la rotation infinitésimale et les champs \(v\) sont les déplacements conservant la section \(S\) plane et non déformée (On utilise là encore les hypothèses de NAVIER-BERNOULLI).
\(T\) est un sous-espace vectoriel de dimension finie égale à 6. Il possède un supplémentaire orthogonal pour le produit scalaire sur \(V\) :
. \({T}^{\perp }=\left\lbrace v\in V/\underset{S}{\int}v.w=0\forall w\in T\right\rbrace\)
Tout champ \(u\) de \(V\) se décompose alors de manière unique en somme d’un élément de \(T\) et d’un élément de \({T}^{\perp }\) :
\(u={u}^{p}+{u}^{s}{u}^{p}\in T,{u}^{s}\in {T}^{\perp }\) .
On postule alors pour les déplacements de surface du tuyau définis au [§2.2] la décomposition en série de Fourier suivante qui vérifie le principe d’orthogonalité précédent avec les déplacements de poutre jusqu’à l’ordre 3 en l’épaisseur du tuyau:
\(u(x,\phi )=\sum_{m=2}^{M}{u}_{m}^{i}(x)\cosm\phi\)
\(+\sum_{m=2}^{M}{u}_{m}^{o}(x)\sin m\phi\)
\(v(x,\phi )={w}_{\mathrm{n1}}^{i}(x)\sin\phi +\sum_{m=2}^{M}{v}_{\text{nm}}^{i}(x)\sin m\phi\)
\(\cdots -{w}_{\mathrm{n1}}^{o}(x)\cos\phi +\sum_{m=2}^{M}{v}_{\text{nm}}^{o}(x)\cosm\phi\)
\(w(x,\phi )={w}_{n}^{o}(x)\) (expansion radiale uniforme)
\(\cdots +\sum_{m=1}^{M}{w}_{\text{nm}}^{i}(x)\cosm\phi\)
\(\cdots +\sum_{m=1}^{M}{w}_{\text{nm}}^{o}(x)\sin m\phi\)
où \(x\) est l’abscisse curviligne le long du coude ou du tuyau droit, indifféremment, et \(M\) le nombre de modes de Fourier. Les rotations \({\beta}_{x}(x,\phi )\) et \({\beta}_{\phi }(x,\phi )\) se déduisent de \(u(x,\phi ),v(x,\phi )\text{et}w(x,\phi )\) par les relations de Love-Kirchhoff du [§2.2.1].
Remarque:
On peut noter que dans la décomposition de \(v(x,\phi )\text{et}w(x,\phi )\) les termes en \(\cos\phi \text{et}\sin\phi\) ne sont pas complètement indépendants du fait de l’orthogonalité avec les déplacements de poutre. Ceci permet en outre d’éviter les mouvements de corps rigide, car si \({v}_{\mathrm{n1}}^{i},{v}_{\mathrm{n1}}^{o}\text{et}{w}_{\mathrm{n1}}^{i},{w}_{\mathrm{n1}}^{o}\) sont indépendants, on peut trouver une solution non nulle donnant des déformations nulles. Par ailleurs dans l’expression de \(u(x,\phi )\) on note l’absence des termes en \(\cos\phi\) et \(\sin\phi\) déjà présents dans la partie poutre.
Si l’on néglige la variation de métrique avec l’épaisseur du tuyau les conditions d’orthogonalité rigoureuse entre les déplacements de poutre et ceux de la surface du tuyau sont satisfaites.Dans le cas contraire, pour satisfaire rigoureusement cette condition il faudrait un développement en série de Fourier des rotations \({\beta}_{x}(x,\phi )\) et \({\beta}_{\phi }(x,\phi )\) commençant à l’ordre 2. Ceci est incompatible avec les hypothèses de Love_Kirchhoff pour ces rotations.
Loi de comportement#
Le comportement du nouvel élément est un comportement 3D en contraintes planes, car le comportement global de la structure est celui d’une coque mince. Il en résulte que \({\sigma}_{\zeta \zeta }=0\) et la loi de comportement s’écrit de façon générale de la manière suivante:
\((\begin{array}{c}{\sigma}_{xx}\\ {\sigma}_{\phi \phi }\\ {\sigma}_{x\phi }\\ {\sigma}_{\zeta \phi }\\ {\sigma}_{x\zeta }\end{array})=C(\begin{array}{c}{\varepsilon}_{xx}^{p}+{\varepsilon}_{xx}^{s}\\ {\epsilon}_{\phi \phi }^{p}+{\varepsilon}_{\phi \phi }^{s}\\ {\gamma}_{x\phi }^{p}+{\gamma}_{x\phi }^{s}\\ {\gamma}_{r\phi }^{p}+{\gamma}_{\zeta \phi }^{s}\\ {\gamma}_{\mathrm{xr}}^{p}+{\gamma}_{x\zeta }^{s}\end{array})=C(\begin{array}{c}{\varepsilon}_{xx}\\ {\varepsilon}_{\phi \phi }\\ {\gamma}_{x\phi }\\ {\gamma}_{\zeta \phi }\\ {\gamma}_{x\zeta }\end{array})\)
Dans notre cas on négligera les cisaillements transverses pour la partie coque de notre champ de déplacement. Il en résulte donc que \({\gamma}_{\zeta x}^{s}={\gamma}_{\zeta \phi }^{s}=0\) . Comme par ailleurs [§2.1.2] on a montré que \({\gamma}_{r\phi }^{p}=0\) il en résulte que \({\sigma}_{\zeta \phi }=0\) . Pour un comportement élastique on a ainsi:
\((\begin{array}{c}{\sigma}_{xx}\\ {\sigma}_{\phi \phi }\\ {\sigma}_{x\phi }\\ {\sigma}_{x\zeta }\end{array})=\frac{E}{1-{\nu}^{2}}(\begin{array}{cccc}1& \nu & 0& 0\\ \nu & 1& 0& 0\\ 0& 0& \frac{1-\nu }{2}& 0\\ 0& 0& 0& \frac{1-\nu }{2}\end{array})(\begin{array}{c}{\varepsilon}_{xx}\\ {\varepsilon}_{\phi \phi }\\ {\gamma}_{x\phi }\\ {\gamma}_{x\zeta }\end{array})\) et \(C=\frac{E}{1-{\nu}^{2}}(\begin{array}{cccc}1& \nu & 0& 0\\ \nu & 1& 0& 0\\ 0& 0& \frac{1-\nu }{2}& 0\\ 0& 0& 0& \frac{1-\nu }{2}\end{array})\) .
Travail de déformation#
L’expression générale du travail de déformation 3D pour l’élément de coude avec le type de comportement précité vaut:
\({W}_{\text{def}}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}({\varepsilon}_{xx}{\sigma}_{xx}+{\varepsilon}_{\phi \phi }{\sigma}_{\phi \phi }+{\gamma}_{x\phi }{\sigma}_{x\phi }+{\gamma}_{x\zeta }{\sigma}_{x\zeta })\text{dV}\)
où \(l\) est l’abscisse curviligne qui vaut \(l=(R+r\sin\phi )\theta\) pour un coude où \(\theta\) est l’angle parcouru pour décrire le coude. Dans le cas d’un coude, on a ainsi \(\text{dV}=(R+r\sin\phi )d\theta rd\phi d\zeta\) et pour un tuyau droit \(\text{dV}=\mathrm{dxrd}\phi d\zeta\) où \(\zeta\) . est la position dans l’épaisseur du coude qui varie entre -h/2 et +h/2. Dans la suite, afin d’alléger les notations, on emploiera la seconde expression.
Energie interne élastique du coude#
Dans le cas d’un comportement élastique, l’énergie interne élastique du coude s’exprime de la façon suivante :
\({\Phi}_{int}=\frac{1}{2}\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}(\frac{E}{1-{\nu}^{2}}({\varepsilon}_{xx}^{2}+{\varepsilon}_{\phi \phi }^{2}+2\nu {\varepsilon}_{xx}{\varepsilon}_{\phi \phi })+G({\gamma}_{x\phi }^{2}+{\gamma}_{x\zeta }^{2}))\text{dV}\)
Cette énergie peut être décomposée en une partie d’énergie de poutre, une partie d’énergie pour la surface du tuyau et des termes de couplage du type \(\underset{-h/2}{\overset{h/2}{\int}}\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{\varepsilon}_{xx}^{p}.{\varepsilon}_{xx}^{s}\text{dV}\) .
Travail des forces et couples extérieurs#
Avec la décomposition des déplacements énoncée en tête de paragraphe, le travail des forces s’exerçant sur le tuyau s’exprime de la manière suivante:
\(\begin{array}{}{W}_{\text{ext}}=\underset{0}{\overset{l}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.({U}^{P}+{U}^{S})\text{dV}+\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{s}.({U}^{P}+{U}^{S})(a\pm h/2)d\phi \text{dx}+\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.({U}^{P}+{U}^{S})rd\phi d\zeta =\\ \underset{0}{\overset{l}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.{U}^{p}\text{dV}+\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{s}.{U}^{p}(a\pm h/2)d\phi \text{dx}+\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.{U}^{p}rd\phi d\zeta +\\ \underset{0}{\overset{l}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.{U}^{s}\text{dV}+\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{s}.{U}^{s}(a\pm h/2)d\phi \mathrm{dx}+\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.{U}^{s}rd\phi d\zeta ={W}_{\text{ext}}^{p}+{W}_{\text{ext}}^{s}\end{array}\)
par simple décomposition linéaire, où \({F}_{v},{F}_{s},{F}_{c}\) sont les efforts volumiques, surfaciques et de contour s’exerçant sur le tuyau, respectivement.
On détermine ainsi:
\({W}_{\text{ext}}^{p}=\underset{0}{\overset{l}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.{U}^{p}\text{dV}+\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{s}.{U}^{p}(a\pm h/2)d\phi \text{dx}+\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.{U}^{p}rd\phi d\zeta\)
et:
\({W}_{\text{ext}}^{s}=\underset{0}{\overset{l}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.{U}^{s}\text{dV}+\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{s}.{U}^{s}(a\pm h/2)d\phi \text{dx}+\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.{U}^{s}rd\phi d\zeta\)
Le travail des forces extérieures peut donc être séparé en deux contributions distinctes des mêmes forces, sur la cinématique de poutre et son supplémentaire.
Principe du travail virtuel#
Il s’écrit de la manière suivante: \(\delta {W}_{\text{ext}}=\delta {W}_{\text{ext}}^{p}+\delta {W}_{\text{ext}}^{s}=\delta {W}_{int}\) avec:
\(\delta {W}_{int}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}({\sigma}_{xx}\delta {\varepsilon}_{xx}+{\sigma}_{\phi \phi }\delta {\varepsilon}_{\phi \phi }+{\sigma}_{x\phi }\delta {\gamma}_{x\phi }+{\sigma}_{x\zeta }\delta {\gamma}_{x\zeta })\text{dV}\)
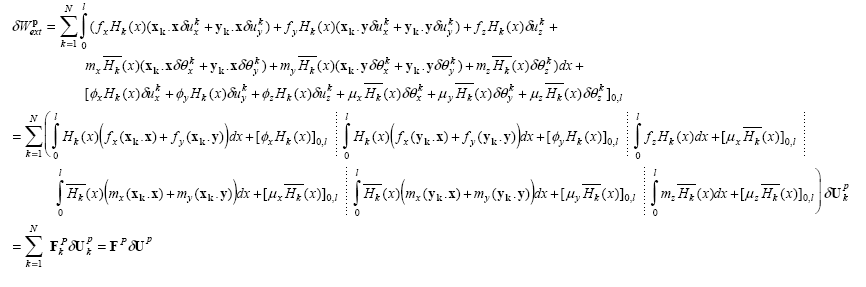
Partie efforts et couples extérieurs pour la partie poutre#
La discrétisation du principe du travail virtuel pour les efforts extérieurs donne:
\(\begin{array}{}\delta {W}_{\text{ext}}^{p}=\underset{0}{\overset{l}{\int}}({f}_{x}\delta {u}_{x}+{f}_{y}=\delta {u}_{y}+{f}_{z}\delta {u}_{z}+{m}_{x}\delta {\theta}_{x}+{m}_{y}\delta {\theta}_{y}+{m}_{z}\delta {\theta}_{z})\text{dx}+\\ [{\phi }_{x}\delta {u}_{x}+{\phi }_{y}\delta {u}_{y}+{\phi }_{z}\delta {u}_{z}+{\mu}_{x}\delta {\theta}_{x}+{\mu}_{y}\delta {\theta}_{y}+{\mu}_{z}\delta {\theta}_{z}{]}_{0,l}\end{array}\)
\({f}_{x},{f}_{y},{f}_{z}\) : forces linéiques agissant suivant \(x\) , \(y\) et \(z\) passant par le centre de gravité des sections transverses:
\({f}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{v}.{e}_{i}rd\phi d\zeta +\underset{0}{\overset{2\pi }{\int}}{F}_{s}.{e}_{i}(a\pm h/2)d\phi\) où \({e}_{x},{e}_{y},{e}_{z}\) sont les vecteurs de la base curviligne locale.
\({m}_{x},{m}_{y},{m}_{z}\) : couples linéiques agissant autour des axes \(x\) , \(y\) et \(z\) :
\({m}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}(r\times {F}_{v}).{e}_{i}rd\phi d\zeta +\underset{0}{\overset{2\pi }{\int}}(r\times {F}_{v}).{e}_{i}(a\pm h/2)d\phi\) où \({e}_{x},{e}_{y},{e}_{z}\) sont les vecteurs de la base curviligne locale.
\({\phi }_{x},{\phi }_{y},{\phi }_{z}\) : forces concentrées agissant suivant \(x\) , \(y\) et \(z\) passant par le centre de gravité des sections transverses:
\({\phi }_{i}=\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}{F}_{c}.{e}_{i}rd\phi d\zeta\) où \({e}_{x},{e}_{y},{e}_{z}\) sont les vecteurs de la base curviligne locale.
\({\mu}_{x},{\mu}_{y},{\mu}_{z}\) : moments concentrés autour des axes \(x\) , \(y\) et \(z\) :
\({\mu}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}\underset{0}{\overset{2\pi }{\int}}(r\times {F}_{c}).{e}_{i}rd\phi d\zeta\) où \({e}_{x},{e}_{y},{e}_{z}\) sont les vecteurs de la base curviligne locale.
Partie efforts et couples extérieurs pour la partie coque#
On suppose que les efforts extérieurs appliqués sur le coude sont indépendants de l’épaisseur du coude
\(\begin{array}{}\delta {W}_{\text{ext}}^{s}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}({F}_{x}\delta u+{F}_{\phi }\delta v+{F}_{r}\delta w+{M}_{x}\delta {\beta}_{x}+{M}_{\phi }\delta {\beta}_{\phi })d\theta d\phi \\ +\underset{0}{\overset{2\pi }{\int}}[{\Phi}_{x}\delta u+{\Phi}_{\phi }\delta v+{\Phi}_{r}\delta w+{{\rm M}}_{\theta}\delta {\beta}_{\theta}+{{\rm M}}_{\phi }\delta {\beta}_{\phi }{]}_{0,l}d\phi \end{array}\)
où:
\({F}_{x},{F}_{\phi },{F}_{r}\) : forces surfaciques agissant suivant \(x\) , \(\phi\) et \(r\) :
\({F}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}{F}_{v}.{e}_{i}rd\zeta +{F}_{s}.{e}_{i}(a\pm h/2)\) où \({e}_{x},{e}_{\phi },{e}_{r}\) sont les vecteurs de la base torique locale.
\({M}_{x},{M}_{\phi }\) : couples surfaciques agissant autour de \(x\) et \(\phi\) :
\({M}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}({\mathrm{\varsigma e}}_{r}x{F}_{v}).{e}_{i}r\mathrm{d\zeta }+(\pm h/2{e}_{r}x{F}_{s}).{e}_{i}(a\pm h/2)\) où \({e}_{x},{e}_{\phi },{e}_{r}\) sont les vecteurs de la base torique locale.
\({\Phi}_{x},{\Phi}_{\phi },{\Phi}_{r}\) : forces linéiques agissant suivant \(x\) , \(\phi\) et \(r\) :
\({\Phi}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}{F}_{c}.{e}_{i}rd\zeta\) où \({e}_{x},{e}_{\phi },{e}_{r}\) sont les vecteurs de la base torique locale.
\({{\rm M}}_{x},{{\rm M}}_{\phi }\) : couples linéiques agissant autour de \(x\) et \(\phi\) :
\({M}_{i}=\underset{-h/2}{\overset{+h/2}{\int}}(\zeta {e}_{r}\times {F}_{c}).{e}_{i}rd\zeta\) où \({e}_{x},{e}_{\phi },{e}_{r}\) sont les vecteurs de la base torique locale.
Remarque:
Lorsque les forces extérieures appliquées sont indépendantes de \(\phi\) le travail extérieur sur la cinématique de coque est nul excepté celui des forces de pression correspondant aux forces suivant \({e}_{r}\) *. On remarque aussi que les expressions des moments linéique et concentré par rapport à* \(r\) sont nulles. On retrouve bien qu’il n’y a pas de moment exercé perpendiculairement au plan de la coque.
Efforts généralisés#
Si \(S\) est l’aire de la section transverse \(S\) du tuyau, on pose:
\(N=\underset{S}{\int}{\sigma}_{xx}\text{dS}\) : effort normal au centre de gravité de la section transverse.
\({T}_{y}=\underset{S}{\int}{\sigma}_{xy}\text{dS}=-\underset{S}{\int}(\sin\phi {\sigma}_{x\zeta }+\cos\phi {\sigma}_{x\phi })\text{dS}\) et
\({T}_{z}=\underset{S}{\int}{\sigma}_{xz}\text{dS}=\underset{S}{\int}(\sin\phi {\sigma}_{x\phi }-\cos\phi {\sigma}_{x\zeta })\text{dS}\) les efforts tranchants suivant \(y\) et \(z\) .
\({M}_{x}=\underset{S}{\int}(y{\sigma}_{xz}-z{\sigma}_{xy})\text{dS}=-\underset{S}{\int}{\sigma}_{x\phi }\text{dS}\) : moment de torsion autour de \(x\) .
\({M}_{y}=\underset{S}{\int}z{\sigma}_{xx}\text{dS}=-\underset{S}{\int}r\cos\phi {\sigma}_{xx}\text{dS}\) : moment de flexion autour de \(y\) .
\({M}_{z}=-\underset{S}{\int}y{\sigma}_{xx}\text{dS}=\underset{S}{\int}r\sin\phi {\sigma}_{xx}\text{dS}\) : moment de flexion autour de \(z\) .
Discrétisation numérique des formulations variationnelles#
Discrétisation des champs de déplacement et de déformation pour la partie poutre#
En un point de la fibre moyenne, le champ de déplacement de poutre est dans le repère curviligne local défini au [§2.1] : \({U}^{p}=(\begin{array}{}{u}_{x}\\ {u}_{y}\\ {u}_{z}\\ {\theta}_{x}\\ {\theta}_{y}\\ {\theta}_{z}\end{array})\)
Ce champ peut être discrétisé de la manière suivante:
\(u=\sum_{k=1}^{N}{H}_{k}(\theta )[{u}_{x}^{k}{x}_{k}+{u}_{y}^{k}{y}_{k}+{u}_{z}^{k}{z}_{k}]\) et \(\theta =\sum_{k=1}^{N}\overline{{H}_{k}}(\theta )[{\theta}_{x}^{k}{x}_{k}+{\theta}_{y}^{k}{y}_{k}+{\theta}_{z}^{k}{z}_{k}]\)
Il est à noter que les valeurs nodales sont données dans les repères locaux attachés aux nœuds et que \(u\) et \(\theta\) doivent être exprimés dans le repère local associé au point courant.
Poutre courbe#
On obtient alors:
\((\begin{array}{c}{u}_{x}\\ {u}_{y}\\ {u}_{z}\end{array})=\sum_{k=1}^{N}{H}_{k}(\theta )(\begin{array}{c}{u}_{x}^{k}({x}_{k}.x)+{u}_{y}^{k}({y}_{k}.x)\\ {u}_{x}^{k}({x}_{k}.y)+{u}_{y}^{k}({y}_{k}.y)\\ {u}_{z}^{k}{z}_{k}\end{array})\) et \((\begin{array}{c}{\theta}_{x}\\ {\theta}_{y}\\ {\theta}_{z}\end{array})=\sum_{k=1}^{N}{\stackrel{ˉ}{H}}_{k}(\theta )(\begin{array}{c}{\theta}_{x}^{k}({x}_{k}.x)+{\theta}_{y}^{k}({y}_{k}.x)\\ {\theta}_{x}^{k}({x}_{k}.y)+{\theta}_{y}^{k}({y}_{k}.y)\\ {\theta}_{z}^{k}{z}_{k}\end{array})\)
D’après la cinématique de poutre présentée plus haut au [§2.1]:
\(\begin{array}{}{\varepsilon}_{\text{rr}}=0\\ {\varepsilon}_{\theta \theta }=\frac{1}{R+r\sin\phi }({u}_{x,\theta }-{u}_{y}-r{\theta}_{x}\cos\phi +{\theta}_{z,\theta }r\sin\phi -{\theta}_{y,\theta }r\cos\phi )\\ {\varepsilon}_{\phi \phi }=0\\ 2{\varepsilon}_{\theta \phi }=\frac{1}{R+r\sin\phi }(-{u}_{x}\cos\phi -{u}_{y,\theta }\cos\phi +{u}_{z,\theta }\sin\phi -r{\theta}_{x,\theta }+{\theta}_{y}r{\cos}^{2}\phi -{\theta}_{z}r\sin\phi \cos\phi )\\ +({\theta}_{z}\cos\phi +{\theta}_{y}\sin\phi )\\ 2{\varepsilon}_{r\theta }=\frac{1}{R+r\sin\phi }(-{u}_{x}\sin\phi -{u}_{y,\theta }\sin\phi -{u}_{z,\theta }\cos\phi +{\theta}_{y}r\sin\phi \cos\phi -{\theta}_{z}r{\sin}^{2}\phi )\\ +({\theta}_{z}\sin\phi -{\theta}_{y}\cos\phi )\\ 2{\varepsilon}_{r\phi }=0\end{array}\)
Sachant que \({x}_{,\theta }=-y\) et \({y}_{,\theta }=x\) avec de plus \(x.{x}_{k}=y.{y}_{k}=\cos(\theta -{\theta}_{k})={C}_{k}\text{et}y.{x}_{k}=-x.{y}_{k}=\sin(\theta -{\theta}_{k})={S}_{k}\) .
Cela implique pour le champ de déformation:
\(\begin{array}{}{\varepsilon}_{\theta \theta }=\frac{1}{R+r\sin\phi }\sum_{k=1}^{N}[{H}_{k}^{'}({u}_{x}^{k}\cos(\theta -{\theta}_{k})-{u}_{y}^{k}\sin(\theta -{\theta}_{k}))+{H}_{k}(-{u}_{x}^{k}\sin(\theta -{\theta}_{k})-{u}_{y}^{k}\cos(\theta -{\theta}_{k}))\\ -{H}_{k}({u}_{x}^{k}\sin(\theta -{\theta}_{k})+{u}_{y}^{k}\cos(\theta -{\theta}_{k}))-r{\stackrel{ˉ}{H}}_{k}\cos\phi ({\theta}_{x}^{k}\cos(\theta -{\theta}_{k})-{\theta}_{y}^{k}\sin(\theta -{\theta}_{k}))\\ -r{\stackrel{ˉ}{H}}_{k}^{'}\cos\phi ({\theta}_{x}^{k}\sin(\theta -{\theta}_{k})+{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))-r{\stackrel{ˉ}{H}}_{k}\cos\phi ({\theta}_{x}^{k}\cos(\theta -{\theta}_{k})-{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))\\ +r{\stackrel{ˉ}{H}}_{k}^{'}\sin\phi {\theta}_{z}^{k}]\\ {\varepsilon}_{\phi \phi }=0\\ {\gamma}_{\theta \phi }=\sum_{k=1}^{N}\frac{1}{R+r\sin\phi }[-{H}_{k}\cos\phi ({u}_{x}^{k}\cos(\theta -{\theta}_{k})-{u}_{y}^{k}\sin(\theta -{\theta}_{k}))\\ -{H}_{k}^{'}\cos\phi ({u}_{x}^{k}\sin(\theta -{\theta}_{k})+{u}_{y}^{k}\cos(\theta -{\theta}_{k}))-{H}_{k}\cos\phi ({u}_{x}^{k}\cos(\theta -{\theta}_{k})-{u}_{y}^{k}\sin(\theta -{\theta}_{k}))\\ +{H}_{k}^{'}{u}_{z}^{k}\sin\phi -r{\stackrel{ˉ}{H}}_{k}^{'}({\theta}_{x}^{k}\cos(\theta -{\theta}_{k})-{\theta}_{y}^{k}\sin(\theta -{\theta}_{k}))-r{\stackrel{ˉ}{H}}_{k}(-{\theta}_{x}^{k}\sin(\theta -{\theta}_{k})-{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))\\ +r{\stackrel{ˉ}{H}}_{k}{\cos}^{2}\phi ({\theta}_{x}^{k}\sin(\theta -{\theta}_{k})+{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))-r{\stackrel{ˉ}{H}}_{k}{\theta}_{z}^{k}\sin\phi \cos\phi ]\\ +{\stackrel{ˉ}{H}}_{k}\sin\phi ({\theta}_{x}^{k}\sin(\theta -{\theta}_{k})+{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))+{\stackrel{ˉ}{H}}_{k}{\theta}_{z}^{k}\cos\phi \\ {\gamma}_{r\theta }=\sum_{k=1}^{N}\frac{1}{R+r\sin\phi }[-{H}_{k}\sin\phi ({u}_{x}^{k}\cos(\theta -{\theta}_{k})-{u}_{y}^{k}\sin(\theta -{\theta}_{k}))\\ -{H}_{k}^{'}\sin\phi ({u}_{x}^{k}\sin(\theta -{\theta}_{k})+{u}_{y}^{k}\cos(\theta -{\theta}_{k}))-{H}_{k}\sin\phi ({u}_{x}^{k}\cos(\theta -{\theta}_{k})-{u}_{y}^{k}\sin(\theta -{\theta}_{k}))\\ -{H}_{k}^{'}{u}_{z}^{k}\cos\phi +r{\stackrel{ˉ}{H}}_{k}\sin\phi \cos\phi ({\theta}_{x}^{k}\sin(\theta -{\theta}_{k})+{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))-r{\stackrel{ˉ}{H}}_{k}{\theta}_{z}^{k}{\sin}^{2}\phi ]\\ -{\stackrel{ˉ}{H}}_{k}\cos\phi ({\theta}_{x}^{k}\sin(\theta -{\theta}_{k})+{\theta}_{y}^{k}\cos(\theta -{\theta}_{k}))+{\stackrel{ˉ}{H}}_{k}{\theta}_{z}^{k}\sin\phi \end{array}\)
Soit sous forme matricielle:
\((\begin{array}{c}{\varepsilon}_{\theta \theta }^{P}\\ {\gamma}_{\theta \phi }^{P}\\ {\gamma}_{\theta \zeta }^{P}\end{array})=\sum_{k=1}^{N}{B}_{k}^{P}{U}_{k}^{P}\) où \({U}_{k}^{p}=(\begin{array}{}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\\ {\theta}_{x}^{k}\\ {\theta}_{y}^{k}\\ {\theta}_{z}^{k}\end{array})\) est le champ de déplacement au nœud \(k\)
et
La matrice de passage des déformations au champ de déplacement s’écrit ainsi: \({B}^{P}=({B}_{{}^{1}}^{P}\cdots {B}_{{}^{N}}^{P})\)
Poutre droite#
\((\begin{array}{}{u}_{x}\\ {u}_{y}\\ {u}_{z}\end{array})=\sum_{k=1}^{N}{H}_{k}(x)(\begin{array}{}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\end{array})\) et \((\begin{array}{}{\theta}_{x}\\ {\theta}_{y}\\ {\theta}_{z}\end{array})=\sum_{k=1}^{N}\stackrel{ˉ}{{H}_{k}}(x)(\begin{array}{}{\theta}_{x}^{k}\\ {\theta}_{y}^{k}\\ {\theta}_{z}^{k}\end{array})\)
D’après la cinématique de poutre présentée plus haut [§2.1]:
\(\begin{array}{}{\varepsilon}_{\text{rr}}=0\\ {\varepsilon}_{xx}={u}_{x,x}+{\theta}_{z,x}r\sin\phi -{\theta}_{y,x}r\cos\phi \\ {\varepsilon}_{\phi \phi }=0\\ 2{\varepsilon}_{x\phi }=-r{\theta}_{x,x}+({\theta}_{y}+{u}_{z,x})\sin\phi +({\theta}_{z}-{u}_{y,x})\cos\phi \\ 2{\varepsilon}_{\text{rx}}=({\theta}_{z}-{u}_{y,x})\sin\phi -({\theta}_{y}+{u}_{z,x})\cos\phi \\ 2{\varepsilon}_{r\phi }=0\end{array}\)
cela implique pour le champ de déformation:
\(\begin{array}{}{\varepsilon}_{xx}=\sum_{k=1}^{N}({H}_{k}^{'}{u}_{x}^{k}-{\overline{{H}^{'}}}_{k}r\cos(\phi ){\theta}_{y}^{k}+{\overline{{H}^{'}}}_{k}r\sin(\phi ){\theta}_{z}^{k})\\ {\varepsilon}_{\phi \phi }=0\\ {\gamma}_{\mathrm{x\phi }}=\sum_{k=1}^{N}(-{H}_{k}^{'}\cos(\phi ){u}_{y}^{k}+{H}_{k}^{'}\sin(\phi ){u}_{z}^{k}-{\overline{{H}^{'}}}_{k}r{\theta}_{x}^{k}+{\overline{H}}_{k}\sin(\phi ){\theta}_{y}^{k}+{\overline{H}}_{k}\cos(\phi ){\theta}_{z}^{k})\\ {\gamma}_{\text{rx}}=\sum_{k=1}^{N}(-{H}_{k}^{'}\sin(\phi ){u}_{y}^{k}-{H}_{k}^{'}\cos(\phi ){u}_{z}^{k}-{\overline{H}}_{k}\cos{(\phi )}_{y}^{k}+{\overline{H}}_{k}\sin(\phi ){\theta}_{z}^{k})\end{array}\)
Soit sous forme matricielle:
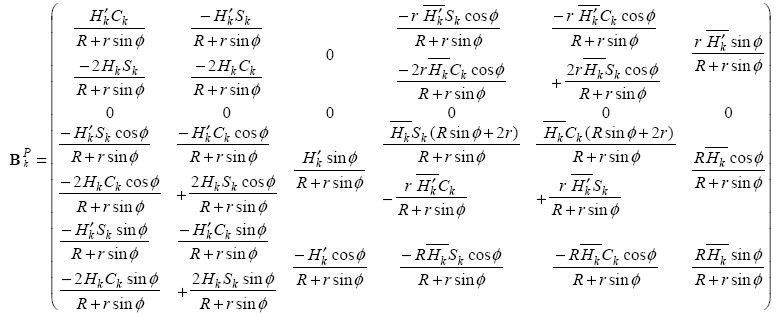
\((\begin{array}{c}{\varepsilon}_{x}^{P}\\ {\varepsilon}_{\phi }^{P}\\ {\gamma}_{x\phi }^{P}\\ {\gamma}_{x\zeta }^{P}\end{array})=\sum_{k=1}^{N}{B}_{k}^{P}{U}_{k}^{P}\) où \({U}_{k}^{p}=(\begin{array}{}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\\ {\theta}_{x}^{k}\\ {\theta}_{y}^{k}\\ {\theta}_{z}^{k}\end{array})\) est le champ de déplacement au nœud \(k\)
et:
\({B}_{{}^{k}}^{P}=(\begin{array}{cccccc}{H}_{k}^{'}& 0& 0& 0& -r\cos(\phi )\overline{{H}_{k}^{'}}& r\sin(\phi )\overline{{H}_{k}^{'}}\\ 0& 0& 0& 0& 0& 0\\ 0& -\cos(\phi ){H}_{k}^{'}& \sin(\phi ){H}_{k}^{'}& -r\overline{{H}_{k}^{'}}& \sin(\phi )\overline{{H}_{k}}& \cos(\phi )\overline{{H}_{k}}\\ 0& -\sin(\phi ){H}_{k}^{'}& -\cos(\phi ){H}_{k}^{'}& 0& -\cos(\phi )\overline{{H}_{k}}& \sin(\phi )\overline{{H}_{k}}\end{array})\)
La matrice de passage des déformations au champ de déplacement s’écrit ainsi: \({B}^{P}=({B}_{{}^{1}}^{P}\cdots {B}_{{}^{N}}^{P})\)
Discrétisation des champs de déplacement et de déformation pour la partie supplémentaire#
On discrétise le champ de déplacement pour la surface du tuyau sous la forme: \({U}^{s}=\sum_{k=1}^{N}{H}_{k}(x){U}_{k}^{s}\) avec:
\({U}^{s}=\left[\begin{array}{c}{u}_{m}^{i}\\ {v}_{m}^{i}\\ {w}_{m}^{i}\\ {u}_{m}^{o}\\ {v}_{m}^{o}\\ {w}_{m}^{o}\\ {w}_{1}^{i}\\ {w}_{1}^{o}\\ {w}_{}^{o}\end{array}\right]\) et . \({U}_{k}^{s}=\left[\begin{array}{c}{u}_{\mathrm{km}}^{i}\\ {v}_{\mathrm{km}}^{i}\\ {w}_{\mathrm{km}}^{i}\\ {u}_{\mathrm{km}}^{o}\\ {v}_{\mathrm{km}}^{o}\\ {w}_{\mathrm{km}}^{o}\\ {w}_{\mathrm{k1}}^{i}\\ {w}_{\mathrm{k1}}^{o}\\ {w}_{k}^{o}\end{array}\right]\) \(\begin{array}{}\\ \\ \\ \\ \\ \\ \\ \end{array}\rbrace m=2,M\)
On a ainsi:
\(\begin{array}{}(\begin{array}{c}u(x,\phi )\\ v(x,\phi )\\ w(x,\phi )\end{array})=(\begin{array}{cccccccccc}\cos(m\phi )& 0& 0& \sin(m\phi )& 0& 0& ⋮& 0& 0& 0\\ 0& \sin(m\phi )& 0& 0& \cos(m\phi )& 0& ⋮& \sin(\phi )& -\cos(\phi )& 0\\ 0& 0& \cos(m\phi )& 0& 0& \sin(m\phi )& ⋮& \cos(\phi )& \sin(\phi )& 1\end{array}){U}^{s}\\ \\ m=2,M\end{array}\)
si les indices \(m\) de \({U}_{k}^{s}\) sont ordonnés de la façon suivante:
\({U}_{k}^{s}=(\begin{array}{c}{u}_{km=2}^{i}\\ {v}_{km=2}^{i}\\ {w}_{km=2}^{i}\\ {u}_{km=2}^{o}\\ {v}_{km=2}^{o}\\ {w}_{km=2}^{o}\\ ⋮\\ {u}_{km=M}^{i}\\ {v}_{km=M}^{i}\\ {w}_{km=M}^{i}\\ {u}_{km=M}^{o}\\ {v}_{km=M}^{o}\\ {w}_{km=M}^{o}\\ {w}_{k1}^{i}\\ {w}_{k1}^{o}\\ {w}_{k}^{o}\end{array})\)
La cinématique de coque présentée plus haut au[§2.2] est:
\(\begin{array}{}{\varepsilon}_{\theta \theta }={E}_{\theta}+\zeta {\kappa}_{x}\\ {\varepsilon}_{\phi \phi }={E}_{\phi }+\zeta {\kappa}_{\phi }\\ {\gamma}_{\theta \phi }=2{E}_{\theta \phi }+2\zeta {\kappa}_{\theta \phi }\\ {\gamma}_{\theta \zeta }=2{E}_{\theta \zeta }=0\\ {\gamma}_{\phi \zeta }=2{E}_{\phi \zeta }=0\end{array}\)
Coude#
Avec:
\(\begin{array}{}{E}_{\theta \theta }=\frac{1}{R+r\sin\phi }(\frac{\partial u}{\partial \theta }+v\cos\phi +w\sin\phi )\\ {E}_{\phi \phi }=\frac{1}{r}(\frac{\partial v}{\partial \phi }+w)\\ 2{E}_{\theta \phi }=\frac{1}{r}\frac{\partial u}{\partial \phi }+\frac{1}{R+r\sin\phi }(\frac{\partial v}{\partial \theta }-u\cos\phi )\end{array}\)
et:
\(\begin{array}{}{\kappa}_{\theta \theta }=\frac{1}{R+r\sin\phi }[-\frac{1}{R+a\sin\phi }(\frac{{\partial}^{2}w}{\partial {\theta}^{2}}-\frac{\partial u}{\partial \theta }\sin\phi )-\frac{\cos\phi }{a}(\frac{\partial w}{\partial \phi }-v)]\\ {\kappa}_{\phi \phi }=-\frac{1}{\text{ar}}(\frac{{\partial}^{2}w}{\partial {\phi }^{2}}-\frac{\partial v}{\partial \phi })\\ 2{\kappa}_{\theta \phi }=(\frac{\partial w}{\partial \theta }-u\sin\phi )[\frac{\cos\phi }{(R+r\sin\phi )(R+a\sin\phi )}+\frac{a\cos\phi }{r(R+a\sin\phi {)}^{2}}]\\ -\frac{{\partial}^{2}w}{\partial \theta \partial \phi }[\frac{1}{a(R+r\sin\phi )}+\frac{1}{r(R+a\sin\phi )}]\\ +\frac{\partial v}{\partial \theta }\frac{1}{a(R+r\sin\phi )}+(\frac{\partial u}{\partial \phi }\sin\phi +u\cos\phi )\frac{1}{r(R+a\sin\phi )}\end{array}\)
permet de décomposer le champ de déformation de coque sur les modes de Fourier de la façon suivante:
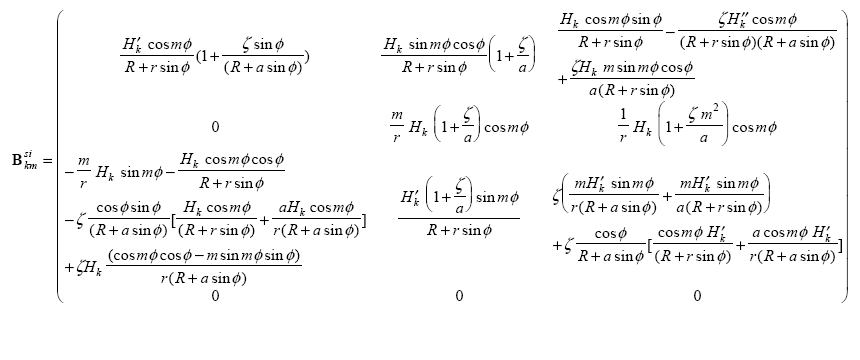
\((\begin{array}{c}{\varepsilon}_{xx}^{s}\\ {\varepsilon}_{\phi \phi }^{s}\\ {\gamma}_{x\phi }^{s}\\ {\gamma}_{x\zeta }^{s}\end{array})=\sum_{k=1}^{N}{B}_{k}^{s}{U}_{k}^{s}\) avec:
\({B}_{k}^{s}=(\begin{array}{ccccccc}{B}_{km=2}^{\text{si}}& \cdots & {B}_{km=M}^{\text{si}}& {B}_{km=2}^{\text{so}}& \cdots & {B}_{km=M}^{\text{so}}& {B}_{k}^{\text{sg}}\end{array})\)
où
et
Tuyau droit#
Avec:
\(\begin{array}{}{E}_{xx}=\frac{\partial u}{\partial x}\\ {E}_{\text{φφ}}=\frac{1}{r}(\frac{\partial v}{\partial \phi }+w)\\ 2{E}_{\mathrm{x\phi }}=\frac{\partial v}{\partial x}+\frac{1}{r}\frac{\partial u}{\partial \phi }\\ {\kappa}_{xx}=\frac{\partial {\beta}_{\phi }}{\partial x}\\ {\kappa}_{\text{φφ}}=-\frac{1}{a}\frac{\partial {\beta}_{x}}{\partial \phi }\\ 2{\kappa}_{\mathrm{x\phi }}=\frac{1}{r}\frac{\partial {\beta}_{\phi }}{\partial \phi }-\frac{\partial {\beta}_{x}}{\partial x}\end{array}\)
\(\begin{array}{}{\beta}_{\phi }=-\frac{\partial w}{\partial x}\\ {\beta}_{x}=\frac{1}{a}(\frac{\partial w}{\partial \phi }-v)\end{array}\)
le champ de déformation de coque se décompose sur les modes de Fourier de la façon suivante:
\(\begin{array}{}{\epsilon}_{xx}=\frac{\partial}{\partial x}\sum_{n=1}^{N}\sum_{m=2}^{M}{H}_{n}(x)(\cos{\mathrm{m\phi u}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi u}}_{\text{nm}}^{o})\\ -\zeta \frac{{\partial}^{2}}{\partial {x}^{2}}\sum_{n=1}^{N}{H}_{n}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos{\mathrm{m\phi w}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi w}}_{\text{nm}}^{o})\right]\\ {\epsilon}_{\text{φφ}}=\frac{1}{r}\frac{\partial}{\partial \phi }\sum_{n=1}^{N}{H}_{n}(x)\left[\sin{\mathrm{\phi w}}_{\mathrm{n1}}^{i}-\cos{\mathrm{\phi w}}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(\sin{\mathrm{m\phi v}}_{\text{nm}}^{i}+\cos{\mathrm{m\phi v}}_{\text{nm}}^{o})\right]\\ +\frac{1}{r}\sum_{n=1}^{N}{H}_{n}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos{\mathrm{m\phi w}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi w}}_{\text{nm}}^{o})\right]\\ +\frac{\zeta}{ar}\frac{\partial}{\partial \phi }\sum_{n=1}^{N}{H}_{n}(x)\left[\sin{\mathrm{\phi w}}_{\mathrm{n1}}^{i}-\cos{\mathrm{\phi w}}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(\sin{\mathrm{m\phi v}}_{\text{nm}}^{i}+\cos{\mathrm{m\phi v}}_{\text{nm}}^{o})\right]\\ -\frac{\zeta}{ar}\frac{{\partial}^{2}}{\partial {\phi }^{2}}\sum_{n=1}^{N}{H}_{n}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos{\mathrm{m\phi w}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi w}}_{\text{nm}}^{o})\right]\\ {\gamma}_{\mathrm{x\phi }}=\frac{\partial}{\partial x}\sum_{n=1}^{N}{H}_{n}(x)\left[\sin{\mathrm{\phi w}}_{\mathrm{n1}}^{i}-\cos{\mathrm{\phi w}}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(\sin{\mathrm{m\phi v}}_{\text{nm}}^{i}+\cos{\mathrm{m\phi v}}_{\text{nm}}^{o})\right]\\ +\frac{1}{r}\frac{\partial}{\partial \phi }\sum_{n=1}^{N}\sum_{m=2}^{M}{H}_{n}(x)(\cos{\mathrm{m\phi u}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi u}}_{\text{nm}}^{o})\\ +\frac{\zeta}{a}\frac{\partial}{\partial x}\sum_{n=1}^{N}{H}_{n}(x)\left[\sin{\mathrm{\phi w}}_{\mathrm{n1}}^{i}-\cos{\mathrm{\phi w}}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(\sin{\mathrm{m\phi v}}_{\text{nm}}^{i}+\cos{\mathrm{m\phi v}}_{\text{nm}}^{o})\right]\\ -(\frac{\zeta}{r}+\frac{\zeta}{r})\frac{{\partial}^{2}}{\partial x\partial \phi }\sum_{n=1}^{N}{H}_{n}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos{\mathrm{m\phi w}}_{\text{nm}}^{i}+\sin{\mathrm{m\phi w}}_{\text{nm}}^{o})\right]\\ {\gamma}_{\mathrm{x\zeta }}=0\end{array}\)
Soit encore:
\(\begin{array}{}{\varepsilon}_{xx}=\sum_{n=1}^{N}\sum_{m=2}^{M}{H}_{n}^{'}(x)(\cos m\phi {u}_{\text{nm}}^{i}+\sin m\phi {u}_{\text{nm}}^{o})\\ -\zeta \sum_{n=1}^{N}{H}_{n}^{''}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos m\phi {w}_{\text{nm}}^{i}+\sin m\phi {w}_{\text{nm}}^{o})\right]\\ {\varepsilon}_{\phi \phi }=\frac{1}{r}\sum_{n=1}^{N}{H}_{n}(x)\left[\cos\phi {w}_{\mathrm{n1}}^{i}+\sin\phi {w}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(m\cos m\phi {v}_{\text{nm}}^{i}-m\sin m\phi {v}_{\text{nm}}^{o})\right]\\ +\frac{1}{r}\sum_{n=1}^{N}{H}_{n}(x)\left[{w}_{n}^{o}+\sum_{m=1}^{M}(\cos m\phi {w}_{\text{nm}}^{i}+\sin{\mathrm{mfw}}_{\text{nm}}^{o})\right]\\ +\frac{\zeta}{\mathrm{ar}}\sum_{n=1}^{N}{H}_{n}(x)\left[\cos\phi {w}_{\mathrm{n1}}^{i}+\sin\phi {w}_{\mathrm{n1}}^{o}+\sum_{m=2}^{M}(m\cos m\phi {v}_{\text{nm}}^{i}-m\sin m\phi {v}_{\text{nm}}^{o})\right]\\ +\frac{\zeta}{\mathrm{ar}}\sum_{n=1}^{N}{H}_{n}(x)\left[\sum_{m=1}^{M}({m}^{2}\cos m\phi {w}_{\text{nm}}^{i}+{m}^{2}\sin m\phi {w}_{\text{nm}}^{o})\right]\\ {\gamma}_{x\phi }=\sum_{n=1}^{N}{H}_{n}^{'}(x)\left[\sin\phi {w}_{\mathrm{n1}}^{i}-\cos{\mathrm{fw}}_{\mathrm{n1}}^{o}\sum_{m=2}^{M}(\sin m\phi {v}_{\text{nm}}^{i}+\cos m\phi {v}_{\text{nm}}^{o})\right]\\ +\frac{1}{r}\sum_{n=1}^{N}\sum_{m=2}^{M}{H}_{n}(x)(-m\sin m\phi {u}_{\text{nm}}^{i}+m\cos m\phi {u}_{\text{nm}}^{o})\\ +\frac{\zeta}{a}\sum_{n=1}^{N}{H}_{n}^{'}(x)\left[\sin\phi {w}_{\mathrm{n1}}^{i}-\cos\phi {w}_{\mathrm{n1}}^{o}\sum_{m=2}^{M}(\sin m\phi {v}_{\text{nm}}^{i}+\cos m\phi {v}_{\text{nm}}^{o})\right]\\ -(\frac{\zeta}{r}+\frac{\zeta}{a})\sum_{n=1}^{N}{H}_{n}^{'}(x)\left[\sum_{m=1}^{M}(-m\sin m\phi {w}_{\text{nm}}^{i}+m\cos m\phi {w}_{\text{nm}}^{o})\right]\\ {\gamma}_{x\zeta }=0\end{array}\)
Ceci donne sous forme matricielle:
\((\begin{array}{c}{e}_{xx}^{s}\\ {e}_{\text{ff}}^{s}\\ {g}_{\mathrm{xf}}^{s}\\ {g}_{xz}^{s}\end{array})=\sum_{k=1}^{N}{B}_{k}^{s}{U}_{k}^{s}\) avec: \({B}_{k}^{s}=(\begin{array}{ccccccc}{B}_{km=2}^{\text{si}}& \cdots & {B}_{km=M}^{\text{si}}& {B}_{km=2}^{\text{so}}& \cdots & {B}_{km=M}^{\text{so}}& {B}_{k}^{\text{sg}}\end{array})\)
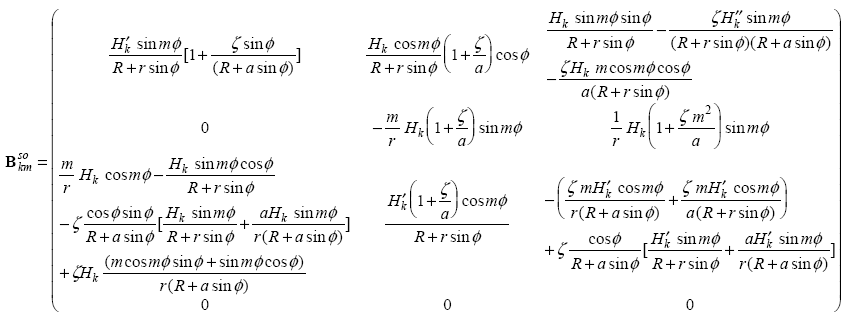
où:
\({B}_{\text{km}}^{\text{si}}=(\begin{array}{ccc}{H}_{k}^{'}\cos(\mathrm{m\phi })& 0& -\zeta {H}_{k}^{''}\cos(\mathrm{m\phi })\\ 0& \frac{m}{r}{H}_{k}\cos(\mathrm{m\phi })(1+\frac{\zeta}{a})& \frac{1}{r}{H}_{k}\cos(\mathrm{m\phi })(1+\frac{\zeta {m}^{2}}{a})\\ -\frac{m}{r}{H}_{k}\sin(\mathrm{m\phi })& {H}_{k}^{'}\sin(\mathrm{m\phi })(1+\frac{\zeta}{a})& (\frac{\zeta}{r}+\frac{\zeta}{a})m{H}_{k}^{'}\sin(\mathrm{m\phi })\\ 0& 0& 0\end{array})\) ,
\({B}_{\text{km}}^{\text{so}}=(\begin{array}{ccc}{H}_{k}^{'}\sin(\mathrm{m\phi })& 0& -\zeta {H}_{k}^{''}\sin(\mathrm{m\phi })\\ 0& -\frac{m}{r}{H}_{k}\sin(\mathrm{m\phi })(1+\frac{\zeta}{a})& \frac{1}{r}{H}_{k}\sin(\mathrm{m\phi })(1+\frac{\zeta {m}^{2}}{a})\\ \frac{m}{r}{H}_{k}\cos(\mathrm{m\phi })& {H}_{k}^{'}\cos(\mathrm{m\phi })(1+\frac{\zeta}{a})& -(\frac{\zeta}{r}+\frac{\zeta}{a})m{H}_{k}^{'}\cos(\mathrm{m\phi })\\ 0& 0& 0\end{array})\)
et
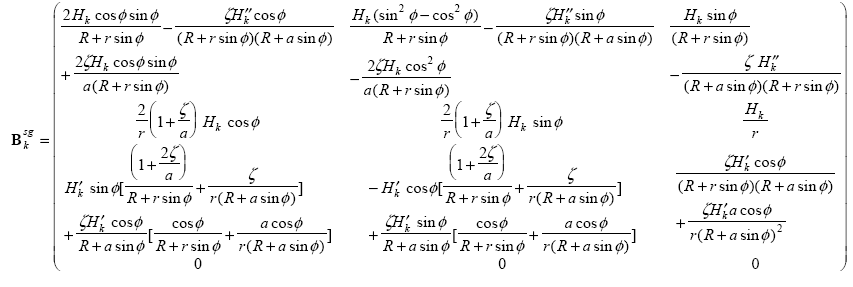
\({B}_{k}^{\text{sg}}=(\begin{array}{ccc}-\zeta {H}_{k}^{''}\cos(\phi )& -\zeta {H}_{k}^{''}\sin(\phi )& -\zeta {H}_{k}^{''}\\ \frac{2}{r}(1+\frac{\zeta}{a}){H}_{k}\cos(\phi )& \frac{2}{r}(1+\frac{\zeta}{a}){H}_{k}\sin(\phi )& \frac{{H}_{k}}{r}\\ (1+\frac{2\zeta }{a}+\frac{\zeta}{r}){H}_{k}^{'}\sin(\phi )& -(1+\frac{2\zeta }{a}+\frac{\zeta}{r}){H}_{k}^{'}\cos(\phi )& 0\\ 0& 0& 0\end{array})\)
Discrétisation du champ de déformation totale#
\((\begin{array}{c}{\epsilon}_{xx}\\ {\epsilon}_{\text{φφ}}\\ {\gamma}_{\mathrm{x\phi }}\\ {\gamma}_{\mathrm{x\zeta }}\end{array})=(\begin{array}{c}{\epsilon}_{xx}^{P}\\ {\epsilon}_{\text{φφ}}^{P}\\ {\gamma}_{\mathrm{x\phi }}^{P}\\ {\gamma}_{\mathrm{x\zeta }}^{P}\end{array})+(\begin{array}{c}{\epsilon}_{xx}^{s}\\ {\epsilon}_{\text{φφ}}^{s}\\ {\gamma}_{\mathrm{x\phi }}^{s}\\ {\gamma}_{\mathrm{x\zeta }}^{s}\end{array})=\sum_{k=1}^{N}{B}_{k}^{P}{U}_{k}^{P}+\sum_{k=1}^{N}{B}_{k}^{s}{U}_{k}^{s}=\sum_{k=1}^{N}{B}_{k}{U}_{k}=BU\) avec
\(B={({B}_{k}^{P}{B}_{k}^{s})}_{k=1,N}\) et \(U={(\begin{array}{c}{U}_{k}^{P}\\ {U}_{k}^{s}\end{array})}_{k=1,N}\)
Matrice de rigidité#
La formulation variationnelle du travail de déformation est:
\(\delta {W}_{\text{def}}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{\mathrm{2\pi }}{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace (\begin{array}{cccc}{\text{δε}}_{xx}& {\text{δε}}_{\text{φφ}}& {\text{δγ}}_{\mathrm{x\phi }}& {\text{δγ}}_{\mathrm{x\zeta }}\end{array})(\begin{array}{c}{\sigma}_{xx}\\ {\sigma}_{\text{φφ}}\\ {\sigma}_{\mathrm{x\phi }}\\ {\sigma}_{\mathrm{x\zeta }}\end{array})\right\rbrace \text{rd}\phi \text{dxd}\zeta\)
soit encore:
\(\delta {W}_{\text{def}}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{\mathrm{2\pi }}{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace (\begin{array}{cccc}{\epsilon}_{xx}& {\epsilon}_{\text{φφ}}& {\gamma}_{\mathrm{x\phi }}& {\gamma}_{\mathrm{x\zeta }}\end{array})C(\begin{array}{c}{\text{δε}}_{xx}\\ {\text{δε}}_{\text{φφ}}\\ {\text{δγ}}_{\mathrm{x\phi }}\\ {\text{δγ}}_{\mathrm{x\zeta }}\end{array})\right\rbrace \text{rd}\phi \text{dxd}\zeta\)
\(\begin{array}{}{\mathrm{dW}}_{\text{def}}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace {(\sum_{k=1}^{N}{B}_{k}{U}_{k})}^{T}C(\sum_{k=1}^{N}{B}_{k}\delta {U}_{k})\right\rbrace rd\phi \mathrm{dx}d\zeta \\ =\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace (\sum_{k=1}^{N}{U}_{{k}^{T}}{B}_{{k}^{T}})C(\sum_{k=1}^{N}{B}_{k}\delta {U}_{k})\right\rbrace rd\phi \mathrm{dx}d\zeta \\ =\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace (\begin{array}{ccc}{U}_{{1}^{T}}& \mathrm{...}& {U}_{{N}^{T}}\end{array}){B}^{T}\mathrm{CB}(\begin{array}{c}\delta {U}_{1}\\ \mathrm{...}\\ \delta {U}_{N}\end{array})\right\rbrace rd\phi \mathrm{dx}d\zeta \\ =(\begin{array}{ccc}{U}_{{1}^{T}}& \mathrm{...}& {U}_{{N}^{T}}\end{array})K(\begin{array}{c}\delta {U}_{1}\\ \mathrm{...}\\ \delta {U}_{N}\end{array})\end{array}\)
Le principe des travaux virtuels s’écrit alors \({\mathrm{\delta U}}^{T}KU=F\mathrm{\delta U}\) où \(K\) est la matrice de rigidité qui vaut:
\(K=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{\mathrm{2\pi }}{\int}}\underset{-h/2}{\overset{h/2}{\int}}\left\lbrace {B}^{T}\text{C B}\right\rbrace \text{r d}\phi \text{dxd}\zeta\)
Remarque:
On ne fait aucune hypothèse sur la loi de comportement. Cette expression est donc en particulier valide dans le cas des comportements non linéaires (plasticité).
Matrice de masse#
Les termes de la matrice de masse sont obtenus après discrétisation de la formulation variationnelle suivante des termes d’inertie non centrifuges:
\({\mathrm{dW}}_{\text{mass}}^{\text{ac}}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{\mathrm{2p}}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\rho \ddot{u}.\mathrm{dv}\text{rdxd}\mathrm{fdz}\) avec \(u=(\begin{array}{c}{u}_{1}(x,\phi ,r)\\ {u}_{2}(x,\phi ,r)\\ {u}_{3}(x,\phi ,r)\\ u(x,\phi ,r)\\ v(x,\phi ,r)\\ w(x,\phi ,r)\end{array})\) .
Les notations utilisées sont celles du [§2.1]: \({u}_{1},{u}_{2}\) et \({u}_{3}\) sont les déplacements de poutre en un point de la section et \(u,v\) et \(w\) sont les déplacements de la fibre moyenne de cette section en ce même point.
La discrétisation donne alors:
\(u=\sum_{k=1}^{N}{H}_{k}{N}_{k}(\begin{array}{c}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\\ {\theta}_{x}^{k}\\ {\theta}_{y}^{k}\\ {\theta}_{z}^{k}\\ {u}_{\text{km}}^{i}\\ {v}_{\text{km}}^{i}\\ {w}_{\text{km}}^{i}\\ {u}_{\text{km}}^{o}\\ {v}_{\text{km}}^{o}\\ {w}_{\text{km}}^{o}\\ {w}_{\mathrm{k1}}^{i}\\ {w}_{\mathrm{k1}}^{o}\\ {w}_{k}^{o}\end{array})\) \(\begin{array}{}\\ \\ \\ \\ \\ \\ \end{array}\rbrace m=2,M\)
où les matrices \({N}_{k}\) ont pour expression:
\({N}_{k}=\left[\begin{array}{ccccccccccccccc}{x}_{k}\cdot x& {y}_{k}\cdot x& 0& -r\cos\phi ({x}_{k}\cdot y)& -r\cos\phi ({y}_{k}\cdot y)& r\sin\phi & 0& & & \text{...}& & & 0& 0& 0\\ {x}_{k}\cdot y& {y}_{k}\cdot y& 0& r\cos\phi ({x}_{k}\cdot x)& r\cos\phi ({y}_{k}\cdot x)& 0& 0& & & \text{...}& & & 0& 0& 0\\ 0& 0& 1& -r\sin\phi ({x}_{k}\cdot x)& -r\sin\phi ({y}_{k}\cdot y)& 0& 0& & & \text{...}& & & 0& 0& 0\\ 0& & & \text{...}& & & \cos(m\phi )& 0& 0& \sin(m\phi )& 0& 0& 0& 0& 0\\ 0& & & \text{...}& & & 0& \sin(m\phi )& 0& 0& \cos(m\phi )& 0& \sin(\phi )& \cos(\phi )& 0\\ 0& & & \text{...}& & & 0& 0& \cos(m\phi )& 0& 0& \sin(m\phi )& \cos(\phi )& \sin(\phi )& 1\end{array}\right]\)
La matrice de masse a alors pour expression:
\(M=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{\mathrm{2\pi }}{\int}}\underset{-h/2}{\overset{+h/2}{\int}}\rho {N}^{T}N\text{rdxd}\mathrm{\phi d\zeta }\) .
avec
\(N={({H}_{k}{N}_{k})}_{k=1,N}\) .
Remarque:
Dans le cas du tuyau droit, on a \({x}_{k}.x={y}_{k}.y=1\) et \({x}_{k}.y={y}_{k}.x=0\) .
Fonctions de forme#
On choisit des fonctions de forme au moins quadratiques pour la partie poutre (déplacements et rotations) afin d’éviter les phénomènes de blocage numérique [bib3]. Ce choix implique l’utilisation d’un élément fini à trois ou quatre nœuds. Dans le cas d’un élément à 3 nœuds, les fonctions de forme sont quadratiques, et pour un élément à 4 nœuds, les fonctions de forme seront cubiques. Pour la partie supplémentaire, on choisit de prendre les mêmes fonctions de forme que pour la partie poutre.
Les fonctions de forme quadratiques (élément à 3 nœuds) sont les suivantes:
\(\begin{array}{}{H}_{1}(x)=(\frac{\mathrm{2x}}{l}-1)(\frac{x}{l}-1)\\ {H}_{2}(x)=\frac{x}{l}(\frac{\mathrm{2x}}{l}-1)\\ {H}_{3}(x)=-4\frac{x}{l}(\frac{x}{l}-1)\end{array}\)
Les fonctions de forme cubiques (élément à 4 nœuds) sont les fonctions de Lagrange d’ordre 3:
\(\begin{array}{c}{H}_{1}(x)=\frac{(\xi -{\xi}_{2})(\xi -{\xi}_{3})(\xi -{\xi}_{4})}{({\xi}_{1}-{\xi}_{2})({\xi}_{1}-{\xi}_{3})({\xi}_{1}-{\xi}_{4})}\\ {H}_{2}(x)=\frac{(\xi -{\xi}_{1})(\xi -{\xi}_{3})(\xi -{\xi}_{4})}{({\xi}_{2}-{\xi}_{1})({\xi}_{2}-{\xi}_{3})({\xi}_{2}-{\xi}_{4})}\\ {H}_{3}(x)=\frac{(\xi -{\xi}_{1})(\xi -{\xi}_{2})(\xi -{\xi}_{4})}{({\xi}_{3}-{\xi}_{1})({\xi}_{3}-{\xi}_{2})({\xi}_{3}-{\xi}_{4})}\\ {H}_{4}(x)=\frac{(\xi -{\xi}_{1})(\xi -{\xi}_{2})(\xi -{\xi}_{3})}{({\xi}_{4}-{\xi}_{1})({\xi}_{4}-{\xi}_{2})({\xi}_{4}-{\xi}_{3})}\\ -1\le \xi \le 1\end{array}\)
Intégration numérique#
L’intégration se fait par la méthode de Gauss le long de la fibre moyenne, la méthode de Simpson dans l’épaisseur et sur la circonférence.
Pour l’intégration de Gauss :
Matrice |
TUYAU_3M - SEG3 |
TUYAU_6M - SEG3 |
TUYAU_3M - SEG4 |
|---|---|---|---|
Rigidité |
2 |
2 |
3 |
Masse |
3 |
3 |
3 |
L’ensemble des matrices de rigidité sont sous-intégrées, la matrice de masse des éléments TUYAU_3M sur SEG4 est sous-intégrée.
L’intégration dans l’épaisseur est une intégration par couches dont le nombre pourra être fixé ultérieurement par l’utilisateur. Pour chaque couche on prend 3 points de Simpson, les 2 points extrémités étant communs avec les couches voisines. Ainsi pour \(n\) couches on utilise \(\mathrm{2n}+1\) points. Le nombre de secteurs pour l’intégration sur la circonférence, pourra aussi être fixé ultérieurement par l’utilisateur. Actuellement les nombres de couches et de secteurs sont fixés à leur valeur maximale: 3 couches (7 points) et 16 secteurs (33 points), ce qui donne au total 693 points d’intégration. L’intégration de Simpson revient à calculer la somme des valeurs de la fonction aux points d’intégrations (les extrémités et le milieu de chaque couche ou secteur) affectées des poids donnés par le tableau ci-dessous.
Cordonnées des points |
Poids |
\(-\sqrt{(1/3)}\) |
1 |
\(\sqrt{(1/3)}\) |
1 |
Cordonnées des points |
Poids |
\(-\sqrt{(3/5)}\) |
5/9 |
0 |
8/9 |
\(\sqrt{(3/5)}\) |
5/9 |
\(\frac{1}{3}\frac{4}{3}\frac{2}{3}\frac{4}{3}\frac{2}{3}\mathrm{.....}\frac{2}{3}\frac{4}{3}\frac{2}{3}\frac{4}{3}\frac{1}{3}\)
Poids des points d’intégration pour la méthode de Simpson
Ainsi pour une fonction \(f(x,\phi ,\zeta )\) sur une géométrie droite on a:
\(\begin{array}{}\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}f(x,\phi ,\zeta )r\text{dx}\mathrm{d\phi }\mathrm{d\zeta }=\frac{l}{2}\underset{-1}{\overset{1}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}\tilde{f}(\tilde{x},\phi ,\zeta )rd\tilde{x}\mathrm{d\phi }\mathrm{d\zeta }\\ =\frac{l}{2}\frac{h}{2{N}_{\text{COU}}}\frac{\mathrm{2\pi }}{2{N}_{\text{SECT}}}\sum_{k=1}^{\text{NPG}}\sum_{n=1}^{{\mathrm{2N}}_{\text{COU}}+1}\sum_{m=1}^{{\mathrm{2N}}_{\text{SECT}}+1}\left[{w}_{k}{w}_{n}{w}_{m}{r}_{{N}_{\text{COU}}}\tilde{f}({\tilde{x}}_{\text{NPG}},{\phi }_{{N}_{\text{SECT}}},{\zeta}_{{N}_{\text{COU}}})\right]\end{array}\)
les \({w}_{k}{w}_{n}{w}_{m}\) étant respectivement les poids d’intégration sur la longueur, sur la circonférence et dans l’épaisseur, ordonnés comme le montrent les deux tableaux ci-dessus.
Discrétisation du travail extérieur#
La formulation variationnelle de l’énergie externe pour la partie poutre s’écrit: \(\begin{array}{}{\mathrm{\delta W}}_{\text{ext}}^{p}=\underset{0}{\overset{l}{\int}}({f}_{x}{\mathrm{\delta u}}_{x}+{f}_{y}{\mathrm{\delta u}}_{y}+{f}_{z}{\mathrm{\delta u}}_{z}+{m}_{x}{\text{δθ}}_{x}+{m}_{y}{\text{δθ}}_{y}+{m}_{z}{\text{δθ}}_{z})\text{dx}+\\ [{\phi }_{x}{\mathrm{\delta u}}_{x}+{\phi }_{y}{\mathrm{\delta u}}_{y}+{\phi }_{z}{\mathrm{\delta u}}_{z}+{\mu}_{x}{\text{δθ}}_{x}+{\mu}_{y}{\text{δθ}}_{y}+{\mu}_{z}{\text{δθ}}_{z}{]}_{0,l}\end{array}\)
et pour la partie supplémentaire elle s’écrit en prenant en compte uniquement le chargement de pression: \({\mathrm{\delta W}}_{\text{ext}}^{s}=\underset{0}{\overset{l}{\int}}{F}_{r}\mathrm{\delta w}\text{dx}+[{\Phi}_{r}\mathrm{\delta w}{]}_{0,l}\)
En tenant compte de la discrétisation des déplacements, on peut écrire:
et
\(\begin{array}{}\delta {W}_{\text{ext}}^{s}=\sum_{k=1}^{N}(\underset{0}{\overset{l}{\int}}{F}_{r}{H}_{k}(x){\mathrm{dw}}_{k}^{o}\text{dx}+[{F}_{r}{H}_{k}(x){\mathrm{dw}}_{k}^{o}{]}_{0,l})\\ =\sum_{k=1}^{N}(\begin{array}{ccccccc}0& 0& 0& 0& 0& 0& \underset{0}{\overset{l}{\int}}{F}_{r}{H}_{k}(x)\text{dx}+[{F}_{r}{H}_{k}(x){]}_{0,l}\end{array})\delta {U}_{k}^{s}\\ =\sum_{k=1}^{N}{F}_{k}^{s}\delta {U}_{k}^{s}={F}^{s}\delta {U}^{s}\end{array}\)
Remarque:
Pour les nœuds extrêmes du coude on a \({x}_{k}.x={y}_{k}.y=1\) et \({x}_{k}.y={y}_{k}.x=0\) *. Dans le cas du tuyau droit, on a* \({x}_{k}.x={y}_{k}.y=1\) et \({x}_{k}.y={y}_{k}.x=0\) pour tout l’élément.
Caractéristiques géométriques de l’élément de tuyau#
On présente dans ce chapitre quelques résultats utiles pour caractériser l’élément tuyau et qui sont calculés par l’option de calcul MASS_INER du Code_Aster . Dans la suite l’indice \(d\) désigne les résultats pour le tuyau droit et l’indice \(c\) pour le tuyau courbe.
Volume: \(\begin{array}{}{V}_{d}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}r\text{dx}\mathrm{d\phi }\mathrm{d\zeta }=\mathrm{2\pi }\text{lah}\\ {V}_{c}=\underset{0}{\overset{l}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}r\text{dx}\mathrm{d\phi }\mathrm{d\zeta }=\underset{0}{\overset{\Theta}{\int}}\underset{0}{\overset{2\pi }{\int}}\underset{-h/2}{\overset{h/2}{\int}}[R+(a+\zeta )\sin\phi ](a+\zeta )\mathrm{d\theta }\mathrm{d\phi }\mathrm{d\zeta }=2\pi R\Theta \text{ah}\end{array}\) .
Centre de gravité: La position de ce dernier est calculée à partir du point milieu aux deux nœuds extrêmes de l’élément de tuyau, dans le repère associé au nœud interne de l’élément (cf [§2.1.1]). Dans ce repère, les coordonnées du centre de gravité sont:
\((\begin{array}{c}{x}_{\text{Gd}}\\ {y}_{\text{Gd}}\\ {z}_{\text{Gd}}\end{array})=(\begin{array}{c}0\\ 0\\ 0\end{array})\) et \((\begin{array}{c}{x}_{\text{Gc}}\\ {y}_{\text{Gc}}\\ {z}_{\text{Gc}}\end{array})=-R(\begin{array}{c}0\\ \frac{2}{\Theta}\sin\frac{\Theta}{2}(1+\frac{1}{{\mathrm{2R}}^{2}}[{a}^{2}+\frac{{h}^{2}}{4}])-\cos\frac{\Theta}{2}\\ 0\end{array})\)
Matrice d’inertie: Il est relativement aisé de calculer la matrice d’inertie au centre de courbure du coude \(O\) dans le repère défini ci-dessus. Pour avoir son expression on utilise alors le fait que:
\(\begin{array}{}{I}_{xx}(G)={I}_{xx}(O)-{\text{mb}}^{2}\\ {I}_{yy}(G)={I}_{yy}(O)\\ {I}_{zz}(G)={I}_{zz}(O)-{\text{mb}}^{2}\end{array}\)
où b est la distance entre le centre de gravité et le centre de courbure qui vaut:
\(b=R\frac{2}{\Theta}\sin\frac{\Theta}{2}(1+\frac{1}{2{R}^{2}}[{a}^{2}+\frac{{h}^{2}}{4}])\) .
Dans le cas d’un tuyau droit, la notion de centre de courbure n’a pas de sens. \(O\) et \(G\) sont confondus avec le nœud interne de l’élément et le milieu du segment joignant les deux nœuds sommet.
Si on note \(A\) l’aire du section transverse et \(I\) son inertie par rapport au centre de la section on peut écrire:
\(\begin{array}{}{I}_{xx}^{d}(O)=\rho \text{lI}\\ {I}_{yy}^{d}(O)=\rho l(I/2+{\text{Al}}^{2}/12)\\ {I}_{zz}^{d}(O)=\rho l(I/2+{\text{Al}}^{2}/12)\end{array}\) et \(\begin{array}{}{I}_{xx}^{c}(O)=\rho R\Theta (\frac{I}{2}+[{\mathrm{AR}}^{2}+3\frac{I}{2}][\frac{1}{2}+\frac{\sin\Theta }{4\Theta }])\\ {I}_{yy}^{c}(O)=\rho R\Theta (\frac{I}{2}+[{\mathrm{AR}}^{2}+3\frac{I}{2}][\frac{1}{2}-\frac{\sin\Theta }{4\Theta }])\\ {I}_{zz}^{c}(O)=\rho R\Theta ({\text{AR}}^{2}+3\frac{I}{2})\end{array}\) .
Raccord tuyau-tuyau#
Afin de pouvoir représenter correctement une ligne de tuyauterie où les coudes ne sont pas coplanaires, il faut choisir une origine commune des \(\phi\) . Ainsi pour deux coudes appartenant à deux plans perpendiculaires entre eux, il faut pouvoir prendre en compte le fait que les déplacements dans le plan du premier coude sont égaux aux déplacements hors plan du second dans la section droite de raccordement.

Figure 6-a: Représentation de deux coudes non coplanaires reliés par un tuyau droit
Dans [bib12], cette origine commune est définie par une ligne génératrice continue le long de la tuyauterie comme indiqué ci-dessus. Cette génératrice intersecte chaque section transverse en un point. L’angle entre \(Z\) défini sur la [Figure 2.1.1-a] et la droite passant par le centre de la section transverse et ce point vaut \(\Omega\) .
Construction d’une génératrice particulière#
Pour une section transverse extrémité de la ligne de tuyauterie, on définit un vecteur origine \({z}_{1}\) unitaire dans le plan de cette section. L’intersection entre la direction de ce vecteur et la surface moyenne du coude détermine la trace de la génératrice sur cette section. On appelle \({x}_{1},{y}_{1},{z}_{1}\) le trièdre direct associé à cette section où \({x}_{1}\) est le vecteur unitaire perpendiculaire à la section transverse construit à la [Figure2.1.1-a]. Pour l’ensemble des autres sections transverses, le trièdre \({x}_{k},{y}_{k},{z}_{k}\) est obtenu soit par rotation du trièdre \({x}_{k-1},{y}_{k-1},{z}_{k-1}\) dans le cas des parties coudées, soit par translation du trièdre \({x}_{k-1},{y}_{k-1},{z}_{k-1}\) pour les parties droites de la tuyauterie. L’intersection entre la section transverse et la droite issue du centre de cette section dirigée par \({z}_{k}\) est la trace d’une génératrice représentée ci‑dessous.

Figure 6.1-a: Représentation de la génératrice de référence
L’origine des \(\phi\) commune à tous les éléments est définie par rapport à la trace de cette génératrice sur la section transverse. L’angle entre la trace de la génératrice et la position courante sur la section transverse est alors appelé \(\psi\) .
Raccord d’un élément à l’autre#
La cinématique du [§3.1] est donnée dans le plan du coude. Celui-ci est déterminé par l’arc de cercle généré par l’axe du coude. L’origine des angles est la normale au plan choisie comme au [§2.1]. Définir l’origine à partir d’une génératrice permet de lever les problèmes de continuité de déplacements d’un élément à un autre. En effet si on postule que les déplacements relatifs des sections transverses sont du type \(\sum_{p=1}^{M}{u}_{p}^{i}\cos\mathrm{p\psi }+{u}_{p}^{o}\sin\mathrm{p\psi }\) où \(\psi\) est l’angle avec la trace de la génératrice sur la section transverse, la continuité des déplacements est automatiquement assurée d’un élément à l’autre.
On note \(Z\) le vecteur perpendiculaire au plan du coude correspondant à l’origine des angles choisie jusqu’ici. On remarque que les vecteurs \(Z\) et \({z}_{k}\) sont dans le plan de la section \(k\) . \(\phi\) est l’angle défini par rapport à \(Z\) . Si l’on introduit \(\psi\) l’angle compté à partir de la trace de la génératrice sur la section transverse (donc par rapport à \({z}_{k}\) ) on a la relation suivante: \(\psi =\phi -{\Omega}_{k}\) où \({\Omega}_{k}=({Z,z}_{k})\) angle entre \(Z\) et \({z}_{k}\) dans le plan de la section transverse. Ainsi les déplacements sont désormais du type \(\sum_{p=1}^{M}{u}_{p}^{i}\cos p(\phi -{\Omega}_{k})+{u}_{p}^{o}\sin p(\phi -{\Omega}_{k})\) . Il est à noter que pour un coude donné l’angle \({\Omega}_{k}\) est identique quelle que soit la section transverse choisie. C’est lors du passage d’un coude à l’autre que la valeur de \({\Omega}_{k}\) change.
Remarque :
Lorsque la tuyauterie est constituée d’éléments droits colinéaires, on choisit arbitrairement \(\Omega =0\) .
Implantation numérique#
La ligne de tuyauterie est maillée par des éléments droits ou courbes à ordonner. Le premier élément indique le commencement de la ligne de tuyauterie. On détermine pour cet élément le trièdre associé \({x}_{1},{y}_{1},{z}_{1}\) . Si cet élément est droit, on choisit \({\Omega}_{1}=0\) , sinon on calcule \({\Omega}_{1}\) comme indiqué au paragraphe précédent. Si le premier élément est droit le trièdre associé à la première section transverse du deuxième élément \({x}_{2},{y}_{2},{z}_{2}\) est obtenu par translation de \({x}_{1},{y}_{1},{z}_{1}\) . Si le premier élément est courbe, le trièdre associé \({x}_{2},{y}_{2},{z}_{2}\) est obtenu par rotation de \({x}_{1},{y}_{1},{z}_{1}\) dans le plan du coude. Dans ce cas \({\Omega}_{2}=0\) si le deuxième élément est droit et \({\Omega}_{2}=({z}^{2},{z}_{2})\) si le deuxième élément est courbe où \({z}^{2}\) est construit comme le \(z\) de la [Figure 2.1.1-a]. La suite de la construction se déduit aisément par récurrence du schéma précédent.
Raccords coque-tuyau et 3D-tuyau#
Démarche suivie#
On adopte ici un démarche similaire aux cas 3D-poutre [R3.03.03], et coque-poutre [R3.03.06]: il s’agit de caractériser la liaison entre un nœud extrémité d’un élément tuyau et un groupe de mailles de bord d’éléments de coques ou 3D. Ceci permet de mailler une partie de la tuyauterie (par exemple un coude) en coques ou éléments 3D, et le reste en tuyaux droits.
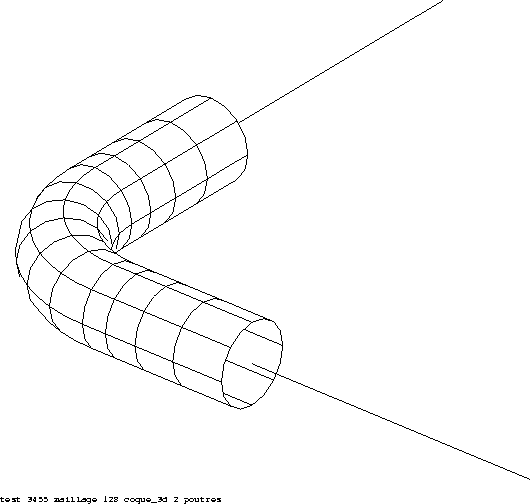
Figure 7.1-a: Liaison entre un maillage COQUE_3D et des tuyaux droits [HI75-98/001]
Grâce à la cinématique introduite dans l’élément tuyau, les liaisons coque - tuyau et 3D - tuyau doivent permettre de mailler en éléments de coques ou en 3D seulement le coude, sans parties droites, puisque l’amortissement de l’ovalisation (et du gauchissement) est pris en compte dans l’élément tuyau.
La liaison se traduit par des relations cinématiques entre les degrés de liberté des nœuds de \(S\) (qui représente la section de raccordement, modélisée par des éléments de bord de coque ou de 3D), et le noeud \(N\) de tuyau.
Pour que la liaison soit efficace, il faut [R3.03.03] qu’elle vérifie les propriétés suivantes:
pouvoir transmettre des efforts de poutre au maillage coques ou 3D, et pouvoir transmettre tous les degrés de liberté de l’élément tuyau (ou les efforts duaux de ceux-ci),
ne pas engendrer dans les éléments de coques ou 3D de contraintes parasites,
ne pas favoriser les relations cinématiques ou les conditions statiques les unes par rapport aux autres,
admettre des comportements quelconques et fonctionner en dynamique.
Les relations linéaires auront la même forme que dans le cas coque-poutre, avec des équations supplémentaires spécifiques aux degrés de liberté du tuyau.
On a déjà introduit au [§3.1] l’espace \(T\) des champs associés à un torseur (défini par deux vecteurs):
\(T=\left\lbrace v\in V/\exists (T,\Omega )\text{tel que}v(M)=T+\Omega \wedge \text{GM}\right\rbrace\)
où pour les champs de déplacement de \(T\) , \(T\) est la translation de la section (ou du point \(G\) ), \(\Omega\) la rotation infinitésimale et les champs

sont les déplacements conservant la section \(S\) plane et non déformée (On utilise là encore les hypothèses de NAVIER-BERNOULLI).
Le déplacement du tuyau vaut alors:
\(\begin{array}{ccc}{u}^{t}={u}^{p}+{u}^{s}& {u}^{p}\in T& ,{u}^{s}\in {T}^{\perp }\end{array}\)
où:
\({T}^{\perp }=\left\lbrace v\in V/\underset{S}{\int}v.w=0\forall w\in T\right\rbrace\)
La démarche consiste à décomposer le champ de déplacement de coque \({u}^{c}\) ou le champ de déplacement tridimensionnel \({u}^{\mathrm{3d}}\) en trois champs:
\({u}^{c}={u}^{p}+{u}^{s}+{u}^{\epsilon}\)
un champ de déplacement suivant une cinématique de poutre \({u}^{p}\) (torseur),
un champ de déplacement local de la section suivant la cinématique de tuyau \({u}^{s}\) (série de Fourier) définie au [§3.1],
un champ supplémentaire \({u}^{\epsilon}\) orthogonal aux deux premiers au sens du produit scalaire.
Remarque:
Lorsque la décomposition en série de Fourier du [§3.1] est infinie on a \({u}^{\epsilon}=0\) .
Pour traduire l’équation ci-dessus en relations linéaires, on montre qu’il faut calculer les intégrales suivantes, pour la coque (ou le 3D) et le tuyau:
déplacement moyen: \({\int}_{S}{u}^{c}\text{dS}\)
rotation moyenne: \({\int}_{S}\text{GM}\wedge {u}^{c}\text{dS}\)
gonflement moyen: \({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}\text{dS}\)
modes de Fourier: \({\int}_{S}{u}^{c}\cos\mathrm{p\phi }\text{dS},{\int}_{S}{u}^{c}\sin\mathrm{p\phi }\text{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\text{GM}}{\parallel \text{GM}\parallel }\cos\mathrm{p\phi }\text{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\text{GM}}{\parallel \text{GM}\parallel }\sin\mathrm{p\phi }\text{dS}\) , \({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}\cos\mathrm{p\phi }\text{dS}\) , \({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}\sin\mathrm{p\phi }\text{dS}\) . Pour les modes de Fourier on choisira les relations les plus simples à exploiter puisque certaines sont redondantes (voir remarque du [§6.7]).
Remarque:
On passe facilement des expressions analytiques du raccord 3D - tuyau à celles du raccord coque - tuyau. Il suffit de substituer \({u}^{\mathrm{3d}}\) à \({u}^{c}\) dans l’ensemble des intégrales de raccordement proposées ci-dessus. On ne reparlera donc de ce raccord qu’au [§7.8] traitant de l’implantation numérique.
Cinématique du tuyau.#
Dans la base curviligne \((o,x,y,z)\) associée à la section transverse du [§2.1] on note les déplacements \({u}_{1},{u}_{2}\text{et}{u}_{3}\) où:
\(\begin{array}{}{u}_{1}(r,x,\phi )={u}_{x}(x)-{\theta}_{y}(x)r\cos\phi +{\theta}_{z}(x)r\sin\phi +u(x,\phi )+\zeta {\beta}_{\phi }(x,\phi )\\ {u}_{2}(r,x,\phi )={u}_{y}(x)+{\theta}_{x}(x)r\cos\phi -v(x,\phi )\cos\phi -w(x,\phi )\sin\phi +\zeta {\beta}_{\theta}(x,\phi )\cos\phi \\ {u}_{3}(r,x,\phi )={u}_{z}(x)-{\theta}_{x}(x)r\sin\phi +v(x,\phi )\sin\phi -w(x,\phi )\cos\phi -\zeta {\beta}_{\theta}(x,\phi )\sin\phi \end{array}\) .
Une fois discrétisée cette expression devient:
\(\begin{array}{}{u}_{1}(r,x,\phi )={\sum}_{k=1}^{N}{H}_{k}(x)({x}_{k}\cdot x){u}_{x}^{k}+{H}_{k}(x)({y}_{k}\cdot x){u}_{y}^{k}-\stackrel{ˉ}{{H}_{k}}(x)({x}_{k}\cdot y){\theta}_{y}^{k}r\cos\phi -\stackrel{ˉ}{{H}_{k}}(x)({y}_{k}\cdot y){\theta}_{y}^{k}r\cos\phi +\stackrel{ˉ}{{H}_{k}}(x){\theta}_{z}^{k}r\sin\phi +u(x,\phi )+\zeta {\beta}_{\phi }(x,\phi )\\ {u}_{2}(r,x,\phi )={\sum}_{k=1}^{N}\stackrel{ˉ}{{H}_{k}}(x)({x}_{k}\cdot y){u}_{x}^{k}+{H}_{k}(x)({y}_{k}\cdot y){u}_{y}^{k}+\stackrel{ˉ}{{H}_{k}}(x)({x}_{k}\cdot x){\theta}_{x}^{k}r\cos\phi +\stackrel{ˉ}{{H}_{k}}(x)({y}_{k}\cdot x){\theta}_{y}^{k}r\cos\phi -v(x,\phi )\cos\phi -w(x,\phi )\sin\phi +\zeta {\beta}_{\theta}(x,\phi )\cos\phi \\ {u}_{3}(r,x,\phi )={\sum}_{k=1}^{N}{H}_{k}(x){u}_{z}^{k}-\stackrel{ˉ}{{H}_{k}}(x)({x}_{k}\cdot x){\theta}_{x}^{k}r\sin\phi -\stackrel{ˉ}{{H}_{k}}(x)({y}_{k}\cdot x){\theta}_{y}^{k}r\sin\phi +v(x,\phi )\sin\phi -w(x,\phi )\cos\phi -\zeta {\beta}_{\theta}(x,\phi )\sin\phi \end{array}\)
où \(u(x,\phi ),v(x,\phi ),w(x,\phi ),{\beta}_{\theta}(x,\phi )\text{et}{\beta}_{\theta}(x,\phi )\) sont discrétisés comme au [§3.1].
Le déplacement en un nœud \(k\) d’abscisse \({x}_{k}\) extrémité de tuyau s’écrit alors:
\(\begin{array}{cc}{u}_{1}(r,{x}_{k},\phi )=& {u}_{x}^{k}-{\theta}_{y}^{k}r\cos(\phi )+{\theta}_{z}^{k}r\sin(\phi )+{\sum}_{m=2}^{M}({u}_{\mathrm{km}}^{i}\cosm\phi +{u}_{\mathrm{km}}^{0}\sinm\phi )+\zeta {\beta}_{\phi }({x}_{k},\phi )\\ {u}_{2}(r,{x}_{k},\phi )=& {u}_{y}^{k}+{\theta}_{x}^{k}r\cos(\phi )-\cos\phi {\sum}_{m=2}^{M}({v}_{\mathrm{km}}^{i}\sinm\phi +{v}_{\mathrm{km}}^{0}\cosm\phi )-\sin\phi {\sum}_{m=2}^{M}({w}_{\mathrm{km}}^{i}\cosm\phi +{w}_{\mathrm{km}}^{0}\sinm\phi )\\ & -{w}_{\mathrm{k1}}^{i}\sin2\phi +{w}_{\mathrm{k1}}^{0}\cos2\phi -{w}_{k}^{0}\sin\phi +\zeta {\beta}_{\theta}({x}_{k},\phi )\cos\phi \\ {u}_{3}(r,{x}_{k},\phi )=& {u}_{z}^{k}-{\theta}_{x}^{k}r\sin(\phi )+\sin\phi {\sum}_{m=2}^{M}({v}_{\mathrm{km}}^{i}\sinm\phi +{v}_{\mathrm{km}}^{0}\cosm\phi )-\cos\phi {\sum}_{m=2}^{M}({w}_{\mathrm{km}}^{i}\cosm\phi +{w}_{\mathrm{km}}^{0}\sinm\phi )\\ & -{w}_{\mathrm{k1}}^{i}\cos2\phi -{w}_{\mathrm{k1}}^{0}\sin2\phi -{w}_{k}^{0}\cos\phi -\zeta {\beta}_{\theta}({x}_{k},\phi )\sin\phi \end{array}\)
Pour le tuyau le vecteur moment cinétique \(\text{GM}\wedge u(M)\) et le gonflement \(\frac{\text{GM}}{\parallel \text{GM}\parallel }.u(M)\) ont pour expressions respectives:
\(\text{GM}\wedge u(M)=\lbrace \begin{array}{c}-{u}_{z}(x)r\sin\phi +{u}_{y}(x)r\cos\phi +{r}^{2}{\theta}_{x}(x)-\text{rv}(x,\phi )\\ -{\text{ru}}_{1}(r,x,\phi )\cos\phi \\ {\text{ru}}_{1}(r,x,\phi )\sin\phi \end{array}\) ,
et:
\(\frac{\text{GM}}{\parallel \text{GM}\parallel }.u(M)=-{u}_{z}(x)\cos\phi -{u}_{y}(x)\sin\phi +w(x,\phi )\) .
Remarque:
La première composante du champ de déplacement fait intervenir \(u(x,\phi )\) de façon isolée. Il en va de même pour la première composante du vecteur rotation vis-à-vis de \(v(x,\phi )\) et du gonflement vis-à-vis de \(w(x,\phi )\) . Cette remarque sera utilisée au [§5.6] pour lier les modes de Fourier aux degrés de liberté des bords de coque.
Cinématique de coque#
La cinématique de coque de Love-Kirchhoff ou de Naghdi-Mindlin s’écrit dans l’épaisseur:
\({u}^{c}(M)={u}^{c}(Q)+({\theta}^{c}(Q)\wedge n).{y}_{3}\)
\({u}^{c}(Q)\) constitue le vecteur déplacement de la surface moyenne en \(Q\) ,
\({\theta}^{c}(Q)\) constitue le vecteur rotation en \(Q\) de la normale selon les directions \({t}_{1}\) et \({t}_{2}\) du plan tangent à \(Q\) .

Ce déplacement et cette rotation sont calculés dans le repère global. Il est possible par changement de repère d’avoir leurs expressions dans la base curviligne \((o,x,y,z)\) du [§2.1] associée à la section transverse de la jonction entre la coque et le tuyau.
Pour chaque nœud, le programme calcule les coefficients des \(9+6(M-1)\) relations linéaires qui relient :
les 6 degrés de liberté du nœud de poutre \(P\) du tuyau,
les \(2+3\times 2(M-1)\) degrés de liberté de Fourier du tuyau,
le degré de liberté de gonflement du tuyau,
avec les degrés de liberté de tous les nœuds de la liste des mailles du bord de coque.
Ces relations linéaires seront dualisées, comme toutes les relations linéaires issues par exemple du mot clé LIAISON_DDL de AFFE_CHAR_MECA. Elles sont construites comme pour la liaison 3D-poutre a partir de l’assemblage de termes élémentaires.
Calcul du déplacement moyen sur la section S#
Il s’agit de calculer l’intégrale \({\int}_{S}{u}^{c}\text{dS}\) , où \({u}^{c}\) est le déplacement de coque (comportant 6 ddl par nœud), \(S\) est le bord de coque.
Le déplacement moyen sur la section \(S\) s’écrit:
\({\int}_{S}{u}^{c}(M)\text{dS}=h{\int}_{l}{u}^{c}(Q)\text{dl}+{\int}_{l}({\theta}^{c}(Q)\wedge n)({\int}_{-h/2}^{h/2}{y}_{3}{\text{dy}}_{3})\text{dl}\)
soit \({\int}_{S}{u}^{c}(M)\text{dS}=h{\int}_{l}{u}^{c}(Q)\text{dl}\) .
Par ailleurs on a aussi pour la partie tuyau:
\({\int}_{S}{u}^{c}(M)\text{dS}={\int}_{S}[{u}^{p}(M)+{u}^{s}(M)]\text{dS}=\underset{S}{\int}(\begin{array}{c}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\end{array})\text{dS}=S(\begin{array}{c}{u}_{x}^{k}\\ {u}_{y}^{k}\\ {u}_{z}^{k}\end{array})\) .
On établit ainsi que le déplacement moyen de la section du tuyau au nœud \(k\) est égal au déplacement de poutre du nœud \(k\) . On peut ainsi lier linéairement les degrés de liberté de poutre de translation au nœud \(k\) avec la moyenne des degrés de liberté de déplacement du bord de la coque.
On néglige dans cette expression la variation de métrique dans l’épaisseur de la coque.
Calcul de la rotation moyenne de la section S#
\(\begin{array}{}{\int}_{S}\text{GM}\wedge {u}^{c}(M)\text{dS}={\int}_{l}{\int}_{-h/2}^{h/2}(\text{GQ}+{y}_{3}n(Q))\wedge ({u}^{c}(Q)+{\theta}^{c}(Q)\wedge n(Q){y}_{3})\text{dl}{\text{dy}}_{3}\\ =h{\int}_{l}\text{GQ}\wedge {u}^{c}(Q)\text{dl}+{\int}_{l}\text{GQ}\wedge ({\theta}^{c}(Q)\wedge n(Q))\text{dl}{\int}_{-h/2}^{h/2}{y}_{3}{\text{dy}}_{3}\\ +{\int}_{l}n(Q)\wedge {u}^{c}(Q)({\int}_{-h/2}^{h/2}{y}_{3}{\text{dy}}_{3})\text{dl}+{\int}_{l}n(Q)\wedge ({\theta}^{c}(Q)\wedge n(Q)){\int}_{-\frac{h}{2}}^{\frac{h}{2}}{y}_{3}^{2}{\text{dy}}_{3}.\text{dl}\end{array}\)
soit \({\int}_{S}\text{GM}\wedge {u}^{c}(M).\text{dS}=h{\int}_{l}\text{GQ}\wedge {u}^{c}(Q)\text{dl}+\frac{{h}^{3}}{12}{\int}_{l}{\theta}^{c}(Q)\text{dl}\) .
Par ailleurs on a aussi pour la partie tuyau:
\({\int}_{S}\text{GM}\wedge {u}^{c}(M).\text{dS}={\int}_{S}\text{GM}\wedge \left[{u}^{p}(M)+{u}^{s}(M)\right].\text{dS}={\int}_{S}(\begin{array}{c}{r}^{2}.{\theta}_{x}^{k}\\ {r}^{2}.{\cos}^{2}\phi {\theta}_{y}^{k}\\ {r}^{2}.{\sin}^{2}\phi {\theta}_{z}^{k}\end{array})=I(\begin{array}{c}{\theta}_{x}^{k}\\ {\theta}_{y}^{k}\\ {\theta}_{z}^{k}\end{array})\)
où I est le tenseur d’inertie de la poutre. On établit ainsi que la rotation moyenne de la section du tuyau au nœud \(k\) est égale à la rotation de poutre au nœud \(k\) . On peut ainsi lier linéairement les degrés de liberté de poutre de rotation au nœud \(k\) avec les degrés de liberté de rotation du bord de la coque.
On néglige dans cette expression la variation de métrique dans l’épaisseur de la coque.
Calcul du gonflement moyen de la section S#
Il s’agit de calculer l’intégrale \({\int}_{S}{u}^{c}.n\text{dS}={\int}_{S}{u}^{c}.\frac{\text{GM}}{\parallel \text{GM}\parallel }\text{dS}\) , où \(n=\frac{\text{GM}}{\parallel \text{GM}\parallel }=\frac{\text{GQ}}{\parallel \text{GQ}\parallel }\) est la normale à la surface moyenne de coque.
Le déplacement moyen sur la section \(S\) s’écrit:
\({\int}_{S}{u}^{c}(M).n\text{dS}=h{\int}_{l}{u}^{c}(Q).n\text{dl}+{\int}_{l}({\theta}^{c}(Q)\mathrm{\wedge }n).n({\int}_{-h/2}^{h/2}{y}_{3}{\text{dy}}_{3})\text{dl}=h{\int}_{l}{u}^{c}(Q).n\text{dl}\) .
Par ailleurs on a aussi pour la partie tuyau:
\({\int}_{S}\frac{\text{GM}}{\mathrm{\parallel }\text{GM}\mathrm{\parallel }}.{u}^{c}(M)\text{dS}={\int}_{S}\frac{\text{GM}}{\mathrm{\parallel }\text{GM}\mathrm{\parallel }}.[{u}^{p}(M)+{u}^{s}(M)]\text{dS}=\underset{S}{\int}{w}_{k}^{o}\text{dS}\)
On établit ainsi que le gonflement moyen de la section du tuyau au nœud \(k\) est égal au degré de liberté de gonflement du tuyau au nœud \(k\) . On peut ainsi lier linéairement le degré de liberté de gonflement de tuyau au nœud \(k\) avec les degrés de liberté de déplacement du bord de la coque.
On néglige dans cette expression la variation de métrique dans l’épaisseur de la coque.
Calcul des coefficients de Fourier sur la section S#
Il s’agit de calculer les six intégrales \({\int}_{S}{u}^{c}\cos\mathrm{p\phi }\text{dS}\) , \({\int}_{S}{u}^{c}\sin\mathrm{p\phi }\text{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\text{GM}}{\parallel \text{GM}\parallel }\cos\mathrm{p\phi }\text{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\text{GM}}{\parallel \text{GM}\parallel }\sin\mathrm{p\phi }\text{dS}\) , \({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}\cos\mathrm{p\phi }\text{dS}\) et \({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}\sin\mathrm{p\phi }\text{dS}\) , où \({u}^{c}\) est le déplacement de coque (comportant 6 ddl par nœud), \(S\) est le bord de coque.
On a la relation suivante pour les déplacements sur la section \(S\) :
\({\int}_{S}{u}^{c}(M)\cos\mathrm{p\phi }\text{dS}=h{\int}_{l}{u}^{c}(Q)\cos\mathrm{p\phi }\text{dl}+{\int}_{l}({\theta}^{c}(Q)\wedge n)({\int}_{-h/2}^{h/2}{y}_{3}{\text{dy}}_{3})\cos\mathrm{p\phi }\text{dl}\)
soit \({\int}_{S}{u}^{c}(M)\cos\mathrm{p\phi }\text{dS}=h{\int}_{l}{u}^{c}(Q)\cos\mathrm{p\phi }\text{dl}\) et \({\int}_{S}{u}^{c}(M)\sin\mathrm{p\phi }\text{dS}=h{\int}_{l}{u}^{c}(Q)\sin\mathrm{p\phi }\text{dl}\) .
Par ailleurs on a aussi pour la partie tuyau:
\({\int}_{S}{u}^{c}(M)\cos\mathrm{p\phi }\text{dS}=\underset{S}{\int}(\begin{array}{c}{u}_{1}(r,{x}_{k},\phi )\\ {u}_{2}(r,{x}_{k},\phi )\\ {u}_{3}(r,{x}_{k},\phi )\end{array})\cos\mathrm{p\phi }\text{dS}\) .
La première composante de cette relation nous permet alors de relier linéairement le coefficient de Fourier \({u}_{\text{kp}}^{i}\) aux composantes des déplacements du bord de coque de la manière suivante:
\(h{\int}_{l}{u}_{1}^{c}(Q)\cos\mathit{p\phi }\text{dl}={\int}_{S}{u}_{1}(r,{x}_{k},\phi )\cos\mathit{p\phi }\text{dS}=\lbrace \begin{array}{cc}-\underset{S}{\int}{\mathit{r\theta }}_{y}^{k}{\cos}^{2}\phi \text{dS}& \text{si}p=1\\ \underset{S}{\int}{u}_{\text{kp}}^{i}{\cos}^{2}\mathit{p\phi }\text{dS}& \text{si}p\mathrm{\ne }1\end{array}\)
De même \({\int}_{S}{u}^{c}(M)\sin\mathrm{p\phi }\text{dS}=\underset{S}{\int}(\begin{array}{c}{u}_{1}(r,{x}_{k},\phi )\\ {u}_{2}(r,{x}_{k},\phi )\\ {u}_{3}(r,{x}_{k},\phi )\end{array})\sin\mathrm{p\phi }\text{dS}\) d’où l’on en déduit que:
\(h{\int}_{l}{u}_{1}^{c}(Q)\sin\mathrm{p\phi }\text{dl}={\int}_{S}{u}_{1}(r,{x}_{k},\phi )\sin\mathrm{p\phi }\text{dS}=\lbrace \begin{array}{cc}\underset{S}{\int}{\mathrm{r\theta }}_{z}^{k}{\sin}^{2}\phi \text{dS}& \text{si}p=1\\ \underset{S}{\int}{u}_{\text{kp}}^{o}{\sin}^{2}\mathrm{p\phi }\text{dS}& \text{si}p\ne 1\end{array}\begin{array}{c}\\ \end{array}\)
On a la relation suivante pour les rotations sur la section \(S\) :
\({\int}_{S}{u}^{c}(M)\wedge .\frac{\text{GM}}{\parallel \text{GM}\parallel }\cos\mathrm{p\phi }\text{dS}=h{\int}_{l}{u}^{c}(Q)\wedge \frac{\text{GQ}}{\parallel \text{GQ}\parallel }\cos\mathrm{p\phi }\text{dl}+{\int}_{l}({\theta}^{c}(Q)\wedge n)\wedge n(\underset{-h/2}{\overset{+h/2}{\int}}{y}_{3}{\text{dy}}_{3})\cos\mathrm{p\phi }\text{dl}\) .
La première composante de cette relation nous permet alors de relier linéairement le coefficient de Fourier \({v}_{\text{kp}}^{o}\) aux composantes des déplacements et des rotations du bord de coque de la manière suivante:
\(h{\int}_{l}[{u}^{c}(Q)\wedge \frac{\text{GQ}}{\parallel \text{GQ}\parallel }{]}_{1}\cos\mathrm{p\phi }\text{dl}=\lbrace \begin{array}{cc}-\underset{S}{\int}[{\text{ru}}_{y}^{k}{\cos}^{2}\phi +{\text{rw}}_{\mathrm{k1}}^{o}{\cos}^{2}\phi ]\text{dS}& \text{si}p=1\\ \underset{S}{\int}{\text{rv}}_{\text{kp}}^{o}{\cos}^{2}(\mathrm{p\phi })\text{dS}& \text{si}p\ne 1\end{array}\)
De même on a:
\(h{\int}_{l}[{u}^{c}(Q)\wedge \frac{\text{GQ}}{\parallel \text{GQ}\parallel }{]}_{1}\sin\mathrm{p\phi }\text{dl}=\lbrace \begin{array}{cc}\underset{S}{\int}[{\text{ru}}_{z}^{k}{\sin}^{2}\phi +{\text{rw}}_{\mathrm{k1}}^{i}{\sin}^{2}\phi ]\text{dS}& \text{si}p=1\\ \underset{S}{\int}{\text{rv}}_{\text{kp}}^{i}{\sin}^{2}(\mathrm{p\phi })\text{dS}& \text{si}p\ne 1\end{array}\)
On a la relation suivante pour le gonflement sur la section \(S\) :
\({\int}_{S}\frac{\text{GM}}{\parallel \text{GM}\parallel }.{u}^{c}(M).\cos\mathrm{p\phi }\text{dS}=h{\int}_{l}\frac{\text{GQ}}{\parallel \text{GQ}\parallel }.{u}^{c}(Q)\cos\mathrm{p\phi }\text{dl}\) .
Cette relation nous permet de relier linéairement le coefficient de Fourier \({w}_{\text{kp}}^{i}\) aux composantes des déplacements du bord de coque de la manière suivante:
\(h{\int}_{l}\frac{\text{GQ}}{\mathrm{\parallel }\text{GQ}\mathrm{\parallel }}.{u}^{c}(Q)\cos\mathit{p\phi }\text{dl}=\lbrace \begin{array}{cc}\underset{S}{\int}[-{u}_{z}^{k}{\cos}^{2}\phi +{w}_{\mathit{k1}}^{i}{\cos}^{2}\phi ]\text{dS}& \text{si}p=1\\ \underset{S}{\int}{w}_{\text{kp}}^{i}{\cos}^{2}(\mathit{p\phi })\text{dS}& \text{si}p\mathrm{\ne }1\end{array}\) .
De même, on a:
\(h{\int}_{l}\frac{\text{GQ}}{\parallel \text{GQ}\parallel }.{u}^{c}(Q)\sin\mathrm{p\phi }\text{dl}=\lbrace \begin{array}{cc}\underset{S}{\int}-{u}_{y}^{k}{\sin}^{2}\phi +{w}_{\mathrm{k1}}^{o}{\sin}^{2}\phi \text{dS}& \text{si}p=1\\ \underset{S}{\int}{w}_{\text{kp}}^{o}{\sin}^{2}(\mathrm{p\phi })\text{dS}& \text{si}p\ne 1\end{array}\)
On utilise pour toutes ces relations le fait que \(\underset{S}{\int}\cos\mathrm{p\phi }\cos\mathrm{q\phi }\text{dS}=0\text{si}p\ne q.\)
On néglige dans cette expression la variation de métrique dans l’épaisseur de la coque.
Remarque:
On peut noter que certaines des relations établies dans ce paragraphe pour p=1 sont redondantes avec celles établies aux paragraphes [§7.4] et [§7.5]. Sur les six relations établies à partir du calcul des formes intégrales \({\int}_{S}{u}^{\mathrm{c.}}\cos\phi \mathrm{dS}\) , \({\int}_{S}{u}^{\mathrm{c.}}\sin\phi \mathrm{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\mathrm{GM}}{∥\mathrm{GM}∥}.\cos\phi \mathrm{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\mathrm{GM}}{∥\mathrm{GM}∥}.\sin\phi \mathrm{dS}\) , \({\int}_{S}{u}^{c}\wedge \frac{\mathrm{GM}}{∥\mathrm{GM}∥}.{u}^{c}\cos\phi \mathrm{dS}\) et \({\int}_{S}{u}^{c}\wedge \frac{\mathrm{GM}}{∥\mathrm{GM}∥}.{u}^{c}\sin\phi \mathrm{dS}\) , seules deux parmi les quatre dernières sont linéairement indépendantes des autres. Ainsi les deux premières ont déjà été établies au [§7.4] et des combinaisons des quatre dernières redonnent celles du [§7.5].
Implantation de la méthode#
Le calcul des coefficients des relations linéaires se fait en trois temps :
calcul de quantités élémentaires sur les éléments de la liste des mailles de bords de coques (maille du type SEG2) :
surface = \({\int}_{\text{elt}}1;{\int}_{\text{elt}}x;{\int}_{\text{elt}}y;{\int}_{\text{elt}}z\) .
sommation de ces quantités sur (\(S\) ) d’où le calcul de :
\(A=\mid S\mid\)
position de \(G\) .
connaissant \(G\) , calcul élémentaire sur les éléments de la liste des mailles de bords de coques de:
\({\int}_{\text{elt}}\text{Ni};{\int}_{\text{elt}}\text{xNi};{\int}_{\text{elt}}\text{yNi};{\int}_{\text{elt}}\text{zNi}\text{où :}\begin{array}{c}\text{GM}=\left\lbrace x,y,z\right\rbrace \\ \text{Ni}=\text{fonctions de forme de l'élément}\end{array}\)
Il faut remarquer que dans le cas du raccord coque - tuyau, les intégrales sur les éléments de bord sont à multiplier par l’épaisseur de la coque : \(\underset{\text{elt}}{\int}{N}_{i}=h\underset{l}{\int}{N}_{i}\) où \(l\) représente la fibre moyenne de l’élément de bord de coque. De plus, on ajoute le terme supplémentaire : \(\frac{{h}^{3}}{12}\underset{l}{\int}{N}_{i}\) .
« assemblage » des termes calculés ci-dessus pour obtenir en chacun des nœuds de la section de raccordement, les coefficients des termes des relations linéaires,
liaison entre les modes de Fourier et les déplacements de coque comme montrée au début du [§7].
Plus précisément:
pour le raccord coque - tuyau, on effectue des calculs élémentaires sur tous les éléments de bord de la section de raccordement \(S\) du type:
\({u}_{\text{cm}}=\frac{1}{\pi}\underset{0}{\overset{\mathrm{2\pi }}{\int}}{u}^{c}\cos(m\varphi )d\varphi =\frac{1}{\pi}\underset{0}{\overset{\mathrm{2\pi }}{\int}}(\begin{array}{c}{u}_{{x}^{c}}\\ {u}_{{\varphi}^{c}}\\ {u}_{{r}^{c}}\end{array})\cos(m\varphi )d\varphi =\frac{1}{\pi}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\cos(m\varphi )P(\begin{array}{c}{u}_{{x}^{c}}\\ {u}_{{y}^{c}}\\ {u}_{{z}^{c}}\end{array})d\varphi\)
et
\({u}_{\text{sm}}=\frac{1}{\pi}\underset{0}{\overset{\mathrm{2\pi }}{\int}}{u}^{c}\sin(m\varphi )d\varphi =\frac{1}{\pi}\underset{0}{\overset{\mathrm{2\pi }}{\int}}(\begin{array}{c}{u}_{{x}^{c}}\\ {u}_{{\varphi}^{c}}\\ {u}_{{r}^{c}}\end{array})\sin(m\varphi )d\varphi =\frac{1}{\pi}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\sin(m\varphi )P(\begin{array}{c}{u}_{{x}^{c}}\\ {u}_{{y}^{c}}\\ {u}_{{z}^{c}}\end{array})d\varphi\)
si \(m>1\) où \(P\) est la matrice de passage du repère local de l’élément au repère global et \({\varphi}_{1}\) la position orthoradiale de l’élément. En exprimant le déplacement en fonction des degrés de liberté nodaux:
\({u}_{\text{cm}}=(\begin{array}{c}{u}_{m}^{i}\\ {v}_{m}^{o}\\ {w}_{m}^{i}\end{array})=\frac{1}{\pi}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\cos(m\varphi )P\sum_{n=1}^{{\text{Nb}}_{\text{noeuds}}}{N}_{n}(\varphi )(\begin{array}{c}{U}_{{x}^{n}}\\ {U}_{{y}^{n}}\\ {U}_{{z}^{n}}\end{array})d\varphi\)
et
\({u}_{\text{sm}}=(\begin{array}{c}{u}_{m}^{o}\\ {v}_{m}^{i}\\ {w}_{m}^{o}\end{array})=\frac{1}{\pi}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\sin(m\varphi )P\sum_{n=1}^{{\text{Nb}}_{\text{noeuds}}}{N}_{n}(\varphi )(\begin{array}{c}{U}_{{x}^{n}}\\ {U}_{{y}^{n}}\\ {U}_{{z}^{n}}\end{array})d\varphi\)
où les \(N\) sont les fonctions de forme de l’élément, on obtient pour chaque calcul deux fois 9coefficients aux nœuds de l’élément courant de \(S\) :
\(\begin{array}{}{u}_{\text{cm}}=(\begin{array}{c}{u}_{m}^{i}\\ {v}_{m}^{o}\\ {w}_{m}^{i}\end{array})=\left\lbrace \sum_{\text{éléments}\in S}^{}\sum_{n=1}^{{\text{Nb}}_{\text{noeuds}}}(\begin{array}{ccc}{a}_{11}& {a}_{12}& {a}_{13}\\ {a}_{21}& {a}_{22}& {a}_{23}\\ {a}_{31}& {a}_{32}& {a}_{33}\end{array})\right\rbrace (\begin{array}{c}{U}_{{x}^{n}}\\ {U}_{{y}^{n}}\\ {U}_{{z}^{n}}\end{array}).\\ {a}_{ij}^{n}=\frac{1}{\pi}\underset{{\varphi}_{1}}{\overset{{\varphi}_{2}}{\int}}\cos(m\varphi ){P}_{ij}(\varphi ){N}_{n}(\varphi )d\varphi =\frac{1}{\mathrm{\pi R}}\underset{0}{\overset{l}{\int}}\cos(\text{mx}){P}_{ij}(x){N}_{n}(x)\text{dx}\end{array}\)
et une expression équivalente pour \({u}_{\mathrm{sm}}\) où \(I\) est la longueur de l’élément de bord de coque.
pour le raccord 3D - tuyau, on effectue des calculs élémentaires sur tous les éléments de bord de la section de raccordement \(S\) du type:
\(\begin{array}{c}{u}_{\text{cm}}=\frac{2}{S}\underset{S}{\overset{}{\int}}{u}^{\text{3d}}\cos(m\varphi )\text{dS}=\frac{2}{S}\underset{S}{\overset{}{\int}}(\begin{array}{c}{u}_{{x}^{\text{3d}}}\\ {u}_{{\varphi}^{\text{3d}}}\\ {u}_{{r}^{\text{3d}}}\end{array})\cos(m\varphi )r.d\varphi .\mathit{d\zeta }\\ =\frac{2}{S}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\underset{{h}_{1}^{n}}{\overset{{h}_{2}^{n}}{\int}}\cos(m\varphi )P\sum_{n=1}^{{\text{Nb}}_{\text{noeuds}}}{N}_{n}(\varphi ,\zeta ){(\begin{array}{c}{U}_{x}^{\mathrm{3d}}\\ {U}_{y}^{\mathrm{3d}}\\ {U}_{z}^{\mathrm{3d}}\end{array})}^{n}r.d\varphi .\mathit{d\zeta }\end{array}\)
et
\(\begin{array}{c}{u}_{\text{sm}}=\frac{2}{S}\underset{S}{\overset{}{\int}}{u}^{\text{3d}}c\sin(m\varphi )\text{dS}=\frac{2}{S}\underset{S}{\overset{}{\int}}(\begin{array}{c}{u}_{{x}^{\text{3d}}}\\ {u}_{{\varphi}^{\text{3d}}}\\ {u}_{{r}^{\text{3d}}}\end{array})\sin(m\varphi )r.d\varphi .\mathit{d\zeta }\\ =\frac{2}{S}\sum_{n=1}^{\text{Nb}\varphi \text{éléments}\in S}\underset{{\varphi}_{1}^{n}}{\overset{{\varphi}_{2}^{n}}{\int}}\underset{{h}_{1}^{n}}{\overset{{h}_{2}^{n}}{\int}}\sin(m\varphi )P\sum_{n=1}^{{\text{Nb}}_{\text{noeuds}}}{N}_{n}(\varphi ,\zeta ){(\begin{array}{c}{U}_{x}^{\mathrm{3d}}\\ {U}_{y}^{\mathrm{3d}}\\ {U}_{z}^{\mathrm{3d}}\end{array})}^{n}\mathit{r.}d\varphi .\mathit{d\zeta }\end{array}\)
si \(m>1\) où \(P\) est la matrice de passage du repère local de l’élément au repère global, \({\varphi}_{1}\) la position orthoradiale de l’élément, \({h}_{1}\) sa position radiale et les \(N\) sont les fonctions de forme de l’élément.
Implantation de l’élément TUYAU dans Code_Aster#
Description#
Ce nouvel élément (de nom METUSEG3) s’appuie sur une maille SEG3ouSEG4 curviligne. Il suppose que la section du tuyau est circulaire. Contrairement aux éléments POU_D_E, POU_D_T, [R3.08.01] cet élément n’est pas «exact» aux nœuds pour des chargements ou torseurs concentrés aux extrémités. Il faut donc mailler avec plusieurs éléments pour obtenir des résultats corrects.
Données de modélisations#
L’élément s’utilise de la façon suivante :
AFFE_MODELE ( MODELISATION = “TUYAU_3M” …)
Les mailles à 4 nœuds sont générées à partir des mailles à 3 nœuds à l’aide de :
MAIL=CREA_MAILLAGE(MAILLAGE=MAIL,MODI_MAILLE=_F(OPTION=”SEG3_4”,TOUT=”OUI”))
On fait appel a la routine INI090 pour les fonctions de forme, leurs dérivées et leurs dérivées secondes (pour la partie coque) aux points de Gauss, ainsi que les poids correspondants.
Les caractéristiques de la section sont définies dans AFFE_CARA_ELEM
AFFE_CARA_ELEM (
POUTRE = _F(SECTION = “CERCLE” ,CARA = ( “R” “EP” ),VALE = (…..) , ) ,
ORIENTATION =_F(GROUP_NO=D,CARA=’GENE_TUYAU’,VALE=(X Y Z),),
TUYAU_NCOU=’NOMBRE DE COUCHES’, TUYAU_NSEC=’NOMBRE DE SECTEURS’,),
)
R et EP représentent, comme pour les éléments de poutres classiques, respectivement le rayon externe et l’épaisseur de la section. On définit aussi sur l’un des nœuds extrémité de la ligne de tuyauterie le vecteur dont la projection sur la section transverse est l’origine des angles pour la décomposition en série de Fourier. Ce vecteur ne doit pas être colinéaire à la ligne moyenne du coude au nœud extrémité considéré. On définit aussi à ce niveau le nombre de couches et de secteurs angulaires à utiliser pour l’intégration numérique.
AFFE_CHAR_MECA ( DDL_IMPO = _F (
DX=..,DY=..,DZ=..,DRX=..,DRY=..,DRZ=..,DDL de poutre
UI2=..,VI2=..,WI2=..,UO2=..,VO2=..,WO2=..,DDL liés au mode 2
UI3=..,VI3=..,WI3=..,UO3=..,VO3=..,WO3=..,DDL liés au mode 3
WO=..,WI1=..,WO1=.., ,DDL de gonflement et mode 1 sur :math:`W`
Les chargements supportés dans AFFE_CHAR_MECA sont :
les forces nodales (FORCE_NODALE),qui ne travaillent que sur les déplacements de poutre.
la pression interne (FORCE_TUYAU= _F (PRES =.. ))
la pesanteur, (PESANTEUR)
les forces linéiques ( FORCE_POUTRE)
La pression interne travaillant sur le degré de liberté de gonflement \(\mathit{WO}\) , on calcule alors:
\({W}_{\text{pres}}={\int}_{0}^{l}{\int}_{0}^{2\pi }p{w}^{o}{r}_{{}_{int}}d\phi \text{dx}={\int}_{0}^{l}{\int}_{0}^{2\pi }p\sum_{k=1}^{N}{H}_{k}{w}_{k}^{o}{r}_{{}_{int}}d\phi \text{dx}=\sum_{k=1}^{N}{H}_{k}\left[{\int}_{0}^{l}{\int}_{0}^{2\pi }p{r}_{{}_{int}}d\phi \text{dx}\right]{w}_{k}^{o}\)
Calcul en élasticité linéaire#
La matrice de rigidité et la matrice de masse (respectivement les options RIGI_MECA et MASS_MECA) sont intégrées numériquement dans le TE0582. Le calcul tient compte du fait que les termes correspondant aux degrés de liberté de poutre sont exprimés classiquement en repère global, et que les degrés de liberté de Fourier sont dans le repère local à l’élément. Dans le cas ou l’élément n’appartient à aucun coude, ce repère local est défini par la génératrice et le vecteur directeur porté par la fibre moyenne de l’élément comme indiqué sur la [Figure 8.3-a]. Dans le cas où l’élément appartient à un coude, le repère local est défini à partir du plan du coude comme mentionné au [§2.1].

Figure 8.3-a: Repère local pour un tuyau droit
Calculs non linéaires#
La matrice de rigidité tangente (options RIGI_MECA_TANG et FULL_MECA) ainsi que le projection plastique (options FULL_MECA et RAPH_MECA) sont intégrées numériquement dans le TE0586. Toutes les lois de contraintes planes disponibles dans Code_Aster peuvent être utilisées: si elles ne sont pas intégrées directement, il est toujours possible d’utiliser une loi de comportement formulée en déformation plane, et de traiter l’hypothèse de contraintes planes à l’aide de la méthode de De Borst.
Les éléments tuyau ne doivent être utilisés qu’en petites déformations et petits déplacements.
Post-traitement#
Les calculs élémentaires disponibles actuellement correspondent aux options:
SIEF_ELGA qui fournissent les contraintes aux points d’intégration dans le repère utilisateur. On stocke ces valeurs de la façon suivante:
pour chaque point de Gauss dans la longueur, (\(n=1,2\) ou \(n=1,3\))
pour chaque point d’intégration dans l’épaisseur, (\(n=1\) , \(2{N}_{\mathit{COU}}+1=7\) )
pour chaque point d’intégration sur la circonférence, (\(n=1\) , \(2{N}_{\mathit{SECT}}+1=33\) )
6 composantes de contraintes: SIXX SIYY SIZZ SIXY SIXZ SIYZ
où \(X\) désigne la direction donnée par les deux nœuds sommets de l’élément, \(Y\) représente l’angle \(\phi\) décrivant la circonférence et \(Z\) représente le rayon. SIZZ et SIYZ correspondant à \({\sigma}_{\text{rr}},{\sigma}_{\mathrm{r\phi }}\) sont prises égales à zéro.
EFGE_ELNO qui permet d’obtenir les efforts généralisés par élément aux nœuds dans le repère de la poutre.
VARI_ELNO qui calcule le champ de variables internes par élément aux nœuds pour toutes les couches et tous les secteurs, dans le repère local de l’élément.
EPSI_ELGA qui fournit les déformations totales aux points d’intégration dans le repère local de l’élément. Le calcul s’effectue dans le TE0584, et donne actuellement les valeurs aux 693 points d’intégration (pour un élément à 3 modes de Fourier). Ces champs sont appelés champs à «sous-points» d’intégration. On stocke ces valeurs de la façon suivante:
pour chaque point de Gauss dans la longueur, (\(n=1,2\) ou \(n=1,3\))
pour chaque point d’intégration dans l’épaisseur, (\(n=1\) , \(2{N}_{\mathit{COU}}+1=7\) )
pour chaque point d’intégration sur la circonférence, (\(n=1\) , \(2{N}_{\mathit{SECT}}+1=33\) )
6 composantes de déformation: EPXX EPYY EPZZ EPXY EPXZ EPYZ
où \(X\) désigne la direction donnée par les deux noeuds sommets de l’élément, \(Y\) représente l’angle \(\phi\) décrivant la circonférence et \(Z\) représente le rayon. EPZZ et EPYZ correspondant à \({\epsilon}_{\text{rr}},{\epsilon}_{\mathrm{r\phi }}\) sont prises égales à zéro.
Les options SIEQ_ELGA et EPEQ_ELGA permettent le calcul des invariants, (Von Mises, Von Mises signé, trace) en chaque point d’intégration (champs à «sous-points»).
EFGE_ELNO fournit les efforts généralises de poutre classiques: N, VY, VZ, MT, MFY, MFZ. Ces efforts sont donnés dans le repère curviligne local de l’élément.
La commande POST_CHAMP / MIN_MAX_SP permet d’extraire, en chacun des points de Gauss linéiques d’un élément, les valeurs maximum et minimum d’une composante d’un champ. Le min / max est pris sur l’ensemble des sous-points d’un point.
Test : SSLL106A#
Il s’agit d’un tuyau droit de vecteur directeur \((4,3,0)\) fixé en son extrémité \(O\) et qui est maillé avec 18 éléments TUYAU.

Le tuyau est soumis à différent types de charge:
un effort de traction,
2 efforts tranchants,
2 moments de flexion,
1 moment de torsion,
une pression interne.
On calcule les déplacements au point \(B\) , les déformation et les contraintes en certains points d’intégration de la section contenant \(B\) , ainsi que les premiers modes propres.
Ceci permet de tester les degrés de liberté de poutre, le degré de liberté de gonflement et les modes 1 du développement en série de Fourier.
Conclusion#
Les éléments finis de coude que nous décrivons ici sont utilisables pour des calculs de tuyauterie en élasticité ou en plasticité. Les tuyauteries peuvent être soumises à divers chargements combinés - pression interne, flexions planes et anti-planes, torsion, extension.
Pour le moment, l’élément réalisé est un élément linéique de type poutre, droit ou courbe, à trois nœuds, en petites rotations et déformations, avec un comportement élasto-plastique local en contraintes planes. Il permet de prendre en compte l’ovalisation, le gauchissement et le gonflement. Il combine les propriétés de coques et de poutres. La cinématique de poutre pour l’axe du coude est augmentée d’une cinématique de coque, de type Love-Kirchhoff sans cisaillement transverse, pour la description du comportement des sections transverses. Cette dernière cinématique est discrétisée en \(M\) modes de Fourier, dont le nombre \(M\) , que la littérature nous incite à choisir égal à 6 [bib8], [bib13], doit à la fois être suffisant pour obtenir de bons résultats en plasticité et pas trop grand pour limiter le temps de calcul. En élasticité, pour des tuyauteries relativement épaisses (le rapport épaisseur sur rayon de la section transverse supérieur à 0.1), on peut se contenter de \(M=2\) ou \(M=3\) .
Bibliographie#
ABAQUS: « Theory manual » Hibbit, Karlsson and Sorensen Inc. (1984) chapitre 4.4.1
K.J. BATHE and C.A. ALMEIDA: « A simple and effective pipe elbow element-linear analysis » , Journal of Applied Mechanics,Vol.47(1980)pp93-100.
J.L. BATOZ, G. DHATT: « Modélisation des structures par éléments finis - Coques » ,Vol.3, Hermès, Paris, 1992.
W.B. BICKFORD, B. T. STROM: « Vibration of plane curved beams », Journal of Sound and Vibration (1975) 39(2), pp.135-146.
J.T. BOYLE and J. SPENCE: « Inelastic analysis methods for piping systems » , Nuclear Engineering and Design 57(1980)369-390.
J.T. BOYLE and J. SPENCE: « A state of the art review of inelastic (static & dynamic) piping analysis methods, with particular application to LMFBR » ,Glasgow,Scotland,U.K.(1983).
GUIHOT: « Comportement mécanique Accidentel du Circuit Primaire », Note EDF HP‑52/96/012/A.
H.D. HIBBIT: « Special structural elements for piping analysis », Proc. Conf., Pressure Vessels and Piping: Analysis and Computers,Miami,ASME,1974.
H.D. HIBBIT & E.K. LEUNG: « An approach to detailed inelastic analysis of thin-walled pipelines », ASME Special Pub., « Nonlinear Finite Element Analysis of Shells »(1981).
KANARACHOS, R.N. KOUTSIDES: « A new Approach of Shell displacements in a Beam‑Type pipe element « , Proc.8th Int. Conf. SMIRT,paper B9/2, Bruxelles (1985).
MASSIN, A. BEN HAJ YEDDER: « Bibliographie pour le développement d’un élément coude avec pression interne et plasticité locale », Note HI-74/97/026, EDF-DER 1998.
MILLARD: « An enriched beam finite element for accurate piping analysis « , Proc.14th Int. Conf. SMIRT, Lyon (1997).
OHTSUBO, O. WATANABÉ: « Stress analysis of pipe bends by ring elements », Trans. ASME, Journal of Pressure Vessel technology,Vol.100(1978)112-122.
WASHIZU: « Variational Methods in Elasticity & Plasticity », 3rd Ed. Pergamon(1981).
PELLET: « Raccord 3D-poutre », Documentation de Référence du Code_Aster [R3.03.03].
J.M. PROIX: « Liaison coque-poutre », Documentation de Référence du Code_Aster [R3.03.06].
VOLDOIRE, C. SEVIN: « Coques thermoélastiques axisymétriques et 1D », Documentation de Référence du Code_Aster [R3.07.02].
J.M. PROIX, P. MIALON, M.T. BOURDEIX: « Eléments exacts de poutres droites et courbes », Documentation de référence du Code_Aster [R3.08.01].
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
6.4 |
P.MASSIN, J.M.PROIX, BEN HADJ YEDDER EDF-R&D/AMA |
Texte initial |
9.4 |
J.M.PROIX EDF-R&D/AMA |
Mise à jour des options de calcul |
17.3 |
M. ELLOUZE EDF-R&D/ERMES |
Sous-intégration des éléments et désactivation de MODI_METRIQUE |