r7.01.20 Comportement de l’acier soumis à la corrosion#
Résumé:
Cette documentation présente le modèle de comportement de l’acier soumis à la corrosion qui permet de décrire le comportement mécanique de renforcement corrodé dans les structures en béton armé. Ce modèle est développé en 1D et 3D, élasto-plastique endommageable à écrouissage isotrope et s’appuie sur le modèle de Lemaître. Ce comportement est utilisé pour des calculs de prédiction de la capacité portante de structures en béton armé atteintes par la corrosion dans le cas de chargement unidimensionnel.
Il est implémenté sous le nom de CORR_ACIER en 3D et en 1D (pour les éléments BARRE et poutres multifibres). Il fonctionne également avec l’option DEBORST pour les contraintes planes (éléments coque); les équations sont intégrées numériquement par un schéma implicite de M. Ortiz et J.C.Simo [bib1] avec multiplicateur plastique obtenu en linéarisant la fonction seuil par rapport aux variables internes et en imposant le respect du critère à convergence.
Description du modèle#
D’un point de vue thermodynamique, pour traduire le comportement du matériau plastique écrouissable et endommageable, le modèle remplace dans la surface seuil, la contrainte \(\sigma\) par la contrainte effective [bib4]:
\(\tilde{\sigma}=\frac{\sigma}{1-D}\) éq 2-1
où, on a:
\(\tilde{\sigma}=\sigma\) pour un matériau vierge
\(\tilde{\sigma}=0\) au moment de la rupture
On postule une forme particulière de l’énergie libre de Helmholtz:
\(\text{Y=}\frac{1}{\rho}\left[\frac{1}{2}(1-D)(\varepsilon -{\varepsilon}^{p})E(\varepsilon -{\varepsilon}^{p})\text{+R}(r)\right]\) éq 2-2
\(\rho\) la masse volumique; \(\Psi\) le potentiel d’état; \(E\) le module d’Young; \(D\) la variable d’endommagement; \(\varepsilon\) la déformation totale; \({\varepsilon}^{p}\) la déformation plastique; \(R(r)\) la fonction d’écrouissage isotrope; \(r\) la variable associée à \(R\) .
Ainsi posé le potentiel est séparé en deux parties distinctes. La première correspond au classique couplage endommagement-élasticité, le second terme à l’écrouissage.
Les lois d’état décrivant ce potentiel sont:
En supposant que le matériau obéit au critère de Von Mises , le critère d’écoulement s’exprime par:
\(\text{f=}\frac{{\sigma}_{\text{eq}}}{1-D}-R-{\sigma}_{y}\le 0\) éq 2-4
où \({\sigma}_{\text{eq}}={(\frac{3}{2}\sigma \text{':}\sigma ')}^{\frac{1}{2}}\) est la contrainte équivalente au sens de Mises, avec \(\sigma'=\sigma-{\sigma}_{H}1\) le déviateur de la matrice de contraintes et \({\sigma}_{H}=\frac{1}{3}\text{Tr}(\sigma)\) la contrainte hydrostatique.
Le potentiel d’endommagement est choisi en fonction puissance de la variable associée à l’endommagement \(-Y\) :
\({\phi}_{D}^{\text{*}}=(\frac{{S}_{0}}{{s}_{0}+1})(\frac{1}{1-D}){(-\frac{Y}{{S}_{0}})}^{{s}_{0}+1}\) éq 2-5
où \({s}_{0}\) et \({S}_{0}\) sont des coefficients caractéristiques du matériau.
La règle de normalité généralisée fournit la loi d’écoulement et les évolutions des variables internes:
\(\lbrace \begin{array}{c}{\dot{\varepsilon}}^{p}=\dot{\lambda}\frac{\partial f}{\partial \sigma}\\ \dot{r}=-\dot{\lambda}\frac{\partial f}{\partial R}\\ \dot{D}=-\dot{\lambda}\frac{\partial {\varphi}_{D}^{\text{*}}}{\partial Y}\end{array}\) éq 2-6
\(\dot{\lambda}\) est le multiplicateur plastique.
Dans ce modèle CORR_ACIER, les variables internes introduites dans le Code_Aster sont:
\(p\) : déformation plastique cumulée, telle que \(\dot{p}={(\frac{2}{3}{\dot{\varepsilon}}^{p}:{\dot{\varepsilon}}^{p})}^{1/2}\) ;
\(D\) : variable scalaire d’endommagement isotrope.
Si \(\text{f=}\frac{{\sigma}_{\text{eq}}}{1-D}-R-{\sigma}_{y}>0\) , on est dans le domaine plastique:
\(\lbrace \begin{array}{c}{\dot{\varepsilon}}^{p}=\frac{3}{2}(\frac{\dot{\lambda}}{1-D})\frac{\sigma'}{{\sigma}_{\text{eq}}}\\ \dot{r}=\lambda=\dot{p}(1-D)\\ \dot{D}={(-\frac{Y}{{S}_{0}})}^{{s}_{0}}\dot{p}\end{array}\) éq 2-7
Dans le cas unidimensionnel, la contrainte équivalente au sens de Mises est \({\sigma}_{\text{eq}}=\mid \sigma\mid`et la déformation plastique cumulée est égale à la valeur absolue de la déformation plastique unidimensionnelle::math:`p=\mid {\varepsilon}^{p}\mid\)
Pour formuler un critère d’endommagement isotrope, on postule que le mécanisme d’endommagement est gouverné par l’énergie de déformation élastique totale (énergie de distorsion + énergie de déformation volumique). Par analogie avec la contrainte équivalente en plasticité, en écrivant que l’énergie d’un état tridimensionnel est égale à celle de l’état unidimensionnel équivalent, défini par une contrainte équivalente d’endommagement \({\sigma}_{\text{eq}}^{\text{*}}\) , on trouve [bib5]:
\({\sigma}_{\text{eq}}^{\text{*}}={\sigma}_{\text{eq}}{\left[\frac{2}{3}(1+\nu)+3(1-2\nu){(\frac{{\sigma}_{H}}{{\sigma}_{\text{eq}}})}^{2}\right]}^{1/2}\) éq 2-8
D’autre part on montre que la variable associée à l’endommagement s’exprime dans le cas isotrope par \(-\text{Y=}\frac{{\tilde{\sigma}}_{\text{eq}}^{{\text{*}}^{2}}}{2E}\) , donc :
\(-\text{Y=}\frac{{\sigma}_{\text{eq}}^{2}}{2E{\left(1-D\right)}^{2}}\left[\frac{2}{3}\left(1+\nu \right)+3\left(1-2\nu \right){\left(\frac{{\sigma}_{H}}{{\sigma}_{\text{eq}}}\right)}^{2}\right]\) éq 2-9
d’où:
\(\dot{D}={\left(\frac{{\sigma}_{\text{eq}}^{2}}{2{\text{ES}}_{0}(1-D{)}^{2}}\right)}^{{s}_{0}}{\left[\frac{2}{3}\left(1+\nu \right)+3\left(1-2\nu \right){\left(\frac{{\sigma}_{H}}{{\sigma}_{\text{eq}}}\right)}^{2}\right]}^{{s}_{0}}\dot{p}\) éq 2-10
L’endommagement ductile n’intervient qu’au-delà d’un seuil:
\({f}_{\text{end}}\text{=p}-{p}_{D}>0\) éq 2-11
où \({p}_{D}\) est la déformation qui correspond au début d’endommagement (voir la [Figure 2-a: Evolution de l’endommagement]). On peut alors considérer que l’écrouissage est saturé dans ce domaine, c’est-à-dire que le comportement du matériau non endommagé équivalent serait parfaitement plastique. Cette hypothèse simplificatrice permet l’intégration analytique du modèle et d’aboutir à une évolution linéaire en fonction de la déformation plastique. En effet, on a dans ce cas:
\(\frac{{\sigma}_{\text{eq}}}{1-D}={\tilde{\sigma}}_{\text{eq}}={\sigma}_{y}=\mathrm{Cte}\) éq 2-12
Si l’on se restreint au cas du chargement radial pour lequel le taux de triaxialité \({\sigma}_{H}/{\sigma}_{\text{eq}}\) est constant, on obtient, en prenant comme condition initiale \(\text{D=}0\) pour \({\text{p<p}}_{D}\) :
\(D={(\frac{{\sigma}_{y}^{2}}{2{\text{ES}}_{0}})}^{{s}_{0}}{\left[\frac{2}{3}(1+\nu)+3(1-2\nu){(\frac{{\sigma}_{H}}{{\sigma}_{\text{eq}}})}^{2}\right]}^{{s}_{0}}\langle p-{p}_{D}\rangle\) éq 2-13
On peut simplifier cette expression en introduisant la condition de rupture \(p={p}_{R}\) qui est le taux de déformation plastique cumulée à rupture => \(D={D}_{c}\) ( endommagement critique) [bib4]
\({D}_{c}={(\frac{{\sigma}_{y}^{2}}{2{\text{ES}}_{0}})}^{{s}_{0}}{\left[\frac{2}{3}(1+\nu)+3(1-2\nu){(\frac{{\sigma}_{H}}{{\sigma}_{\text{eq}}})}^{2}\right]}^{{s}_{0}}\langle {p}_{R}-{p}_{D}\rangle\) éq 2-14
En rapportant dans l’expression de D , on obtient:
\(\text{D=}\frac{{D}_{c}}{{p}_{R}-{p}_{D}}(p-{p}_{D})\) éq 2-15
La loi d’écrouissage de l’acier intégrée dans le modèle de l’acier est la suivante(hors endommagement):
\({\sigma}_{\text{eq}}-{\sigma}_{y}{\text{=Kp}}^{1/m}\) éq 2-16
\(K\) , \(m\) , \({\sigma}_{y}\) sont les paramètres du matériau, fournis dans DEFI_MATERIAU / CORR_ACIERpar les mots clésECRO_K, ECRO_M.
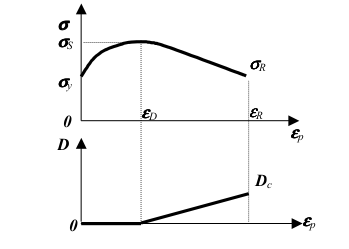
Fig. 208 Figure 2-a: Evolution de l’endommagement#

Fig. 209 Figure2-b: Loi d’écrouissage de l’acier non corrodé#
Calcul des paramètres matériau#
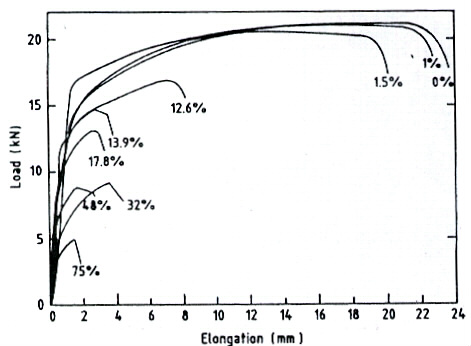
Les résultats des essais de traction d’A.A. Almusallam [bib2] ont été utilisés pour identifier la loi de comportement de l’acier non corrodé et la dépendance de la déformation plastique à rupture en fonction du taux de corrosion.
Loi de comportement de l’acier#
L’acier non allié est le type d’acier principal utilisé dans le génie civil. Le modèle de comportement unidimensionnel de l’acier non allié en chargement monotone unidirectionnel doit être déterminé à partir des résultats d’un essai de traction sur une barre ou une éprouvette plate non corrodée. Un exemple de simulation numérique nécessaire pour déterminer cette loi de comportement est présenté sur la [Figure 3.2-a].
Prise en compte de la corrosion#
La présence de corrosion a deux effets sur le renforcement dans les structures en béton armé :
une réduction de la section;
une réduction de \({\epsilon}_{R}\) en fonction de \({T}_{c}\) :
La réduction de section se traduit par un diminution du diamètre pour les barres ou par une diminution d’épaisseur pour les tôles:
\({T}_{c}=100\left(\frac{{d}_{\text{corrodé}}^{2}}{{d}_{\text{noncorrodé}}^{2}}\right)\) ou \({T}_{c}=100\left(\frac{{e}_{\text{corrodé}}}{{e}_{\text{noncorrodé}}}\right)\) éq 3.2- 1
Remarque: La réduction de section n’est pas traitée au niveau du modèle de comportement, elle doit être prise en compte au niveau du fichier de commande dans AFFE_CARA_ELEMpar exemple.
Dans le cas uniaxial, la déformation plastique à rupture \({\varepsilon}_{R}\) dépend du taux de corrosion. Cette évolution est présentée sur la [Figure 3.2-b].
15 % 
|

|
Figure 3.2-a: Influence de la corrosion sur le comportement de l’acier en fonction du taux de corrosion |
Figure 3.2-b: L’évolution de la déformation plastique à rupture en fonction du taux de corrosion |
On déduit de ces données expérimentales (essais de traction) la variation de la déformation plastique à rupture en fonction du taux de corrosion:
\({T}_{c}<\text{15\%}\Rightarrow \text{}{\epsilon}_{R}\text{=-0}.0111\text{Tc+}0.2345\) éq 3.2- 2
\({T}_{c}>\text{15\%}\Rightarrow {\epsilon}_{R}\text{=-0}.0006\text{Tc+}0.051\) éq 3.2- 3
Par analyse de différents essais de traction, on constate que le comportement du renforcement corrodé est quasi-fragile et \({\epsilon}_{D}=0.8\phantom{\rule{0.5em}{0ex}}{\epsilon}_{R}\) (\({\epsilon}_{D}\) au pic).
Afin d’intégrer le modèle en 3D, la déformation plastique cumulée critique est calculée en utilisant \({p}_{R}={\left(\frac{2}{3}{\epsilon}_{R}:{\epsilon}_{R}\right)}^{1/2}\) en prenant en compte que l’état uniaxial est défini par un état unidimensionnel en contrainte mais tridimensionnel en déformation [bib5]:
\({\epsilon}_{R}=\left[\begin{array}{ccc}{\epsilon}_{R}& 0& 0\\ 0& -{\nu}^{\text{*}}{\epsilon}_{R}& 0\\ 0& 0& -{\nu}^{\text{*}}{\epsilon}_{R}\end{array}\right]\) éq 3.2-4
où \({\nu}^{\text{*}}\) est le coefficient de contraction, égal au coefficient de Poisson :math:`nu ` en élasticité:
\({\nu}^{\text{*}}=\nu \frac{{\varepsilon}^{e}}{\varepsilon}+\frac{1}{2}\frac{{\varepsilon}^{p}}{\varepsilon}=\frac{1}{2}-\frac{{\varepsilon}^{e}}{\varepsilon}(\frac{1}{2}-\nu )\) éq 3.2-5
ici \(\epsilon ={\epsilon}_{R}\) et on approxime \({\varepsilon}^{e}\) par: \({\varepsilon}_{y}=\frac{{\sigma}_{y}}{E}\)
\({\nu}^{\text{*}}=\frac{1}{2}-\frac{{\varepsilon}_{y}}{{\varepsilon}_{R}}(\frac{1}{2}-\nu )\) éq 3.2-6
Pour le calcul de \({p}_{D}\) , on considère que le taux de triaxialité au seuil d’endommagement est identique à celui de la rupture:
\({p}_{D}=0,8{p}_{R}\) éq 3.2-7
Résolution numérique#
Intégration du modèle#
L’intégration du modèle s’effectue en deux étapes, tout d’abord une prédiction élastique de la contrainte:
1ère étape : élasticité \(\lbrace \begin{array}{c}\dot{\epsilon}={\dot{\epsilon}}^{e}+{\dot{\epsilon}}^{p}\\ \dot{\sigma}=E{\dot{\epsilon}}^{e}\\ {\dot{\epsilon}}^{p}=0\\ \dot{p}=0\\ \dot{D}=0\end{array}\) éq 4.1-1
Remarquons en particulier que l’endommagement \(D\) n’intervient pas dans la relation contrainte-déformation élastique (pas de coefficient \((1-D)\) dans les coefficients d’élasticité).
La seconde étape consiste en une actualisation implicite des variables internes du modèle par des corrections apportées à déformation totale nulle. Dans cette étape, on fait l’itération entre la plasticité et l’endommagement.
\(\lbrace \begin{array}{c}\dot{\varepsilon}={\dot{\varepsilon}}^{e}+{\dot{\varepsilon}}^{p}\text{=0}\\ \dot{\sigma}=E{\dot{\varepsilon}}^{p}\\ {\dot{\varepsilon}}^{p}=\dot{\lambda}\frac{\partial f}{\partial \sigma }\\ \dot{r}=-\dot{\lambda}\frac{\partial f}{\partial R}\end{array}\) éq 4.1-2
L’expression du multiplicateur plastique est obtenue en linéarisant la fonction seuil par rapport aux variables internes et en imposant le respect du critère à convergence:
\({\text{f=f}}^{-}+\frac{\partial {f}^{-}}{\partial \sigma }(\sigma -{\sigma}^{-})+\frac{\partial {f}^{-}}{\partial R}(R-{R}^{-})=0\) éq 4.1-3
Considérons la discrétisation des équations de relaxation :
\(\lbrace \begin{array}{c}\sigma -{\sigma}^{-}\text{=-}\Delta \lambda \mathrm{E}\frac{\partial {f}^{-}}{\partial \sigma }\\ R-{R}^{-}{\text{=R}}^{'}(r)\Delta r\\ \Delta \text{p=}\frac{\Delta \lambda }{1-{D}^{-}}\\ {R}^{'}(p)=\frac{K}{m}{\left[\frac{{\sigma}_{\text{eq}}}{(1-{D}^{-})K}-\frac{{\sigma}_{y}}{K}\right]}^{(1-m)}\end{array}\) éq 4.1-4
L’expression du multiplicateur plastique est obtenue en remplaçant [éq 4.1-3] dans [éq 4.1-4], (\(\Delta \text{r=}\Delta \lambda ` et pour :math:`D\) fixé à \({D}^{-}\) , \(\text{R'}(p)\text{=R'}(r)\) )
\(\Delta \lambda =\frac{{f}^{-}}{\frac{\partial {f}^{-}}{\partial \sigma }E\frac{\partial {\phi }^{-}}{\partial \sigma }-\frac{\partial {f}^{-}}{\partial R}\frac{K}{m}{\left[\frac{{\sigma}_{\text{eq}}}{K(1-{D}^{-})}-\frac{{\sigma}_{y}}{K}\right]}^{(1-m)}}\) éq 4.1-5
Les expressions des différentes dérivées de la surface seuil et du potentiel de dissipation sont données dans les équations suivantes:
\(\begin{array}{}\frac{\partial f}{\partial \sigma }=\frac{3}{2}\frac{\sigma '}{{\sigma}_{\text{eq}}(1-D)}\\ \frac{\partial \phi }{\partial \sigma }=\frac{3}{2}\frac{\sigma '}{{\sigma}_{\text{eq}}(1-D)}\\ \frac{\partial f}{\partial R}=-1\end{array}\) éq 4.1-6
Dans le cas 1D:
\(\frac{\partial f}{\partial \sigma }=\frac{\partial \varphi }{\partial \sigma }=\frac{\text{sgn}(\sigma )}{1-D}\) éq 4.1-7b
La valeur obtenue pour le multiplicateur plastique à chaque intégration est réinjectée dans les équations de relaxation jusqu’à convergence (retour de la contrainte sur la surface seuil). Le critère retenu consiste à s’arrêter lorsque la valeur du seuil à l’itération suivante est devenue suffisamment petite par rapport à \({\sigma}_{y}\) :
\(\mid f\mid \le \text{tol}.{\sigma}_{y}\) éq 4.1-8
Pour une utilisation directe des propriétés de normalité des surfaces seuils, le calcul à effectuer à chaque itération se ramène uniquement au calcul du multiplicateur de plasticité permettant les corrections si nécessaires (pas de calcul de Jacobien comme pour les méthodes de Newton) [bib1], [bib6].
L’étape suivante est l’endommagement qui prend en compte la variation de la variable d’endommagement. La fonction seuil de l’endommagement est la suivante:
\({f}_{\text{end}}\text{=p}-{p}_{D}\) éq 4.1- 9
si \({f}_{\text{end}}>0\) on calcule l’endommagement puis on retourne à la correction de plasticité :
\(\text{D=}\frac{{D}_{C}}{{p}_{R}-{p}_{D}}(p-{p}_{D})\) éq 4.1-10
Remarque: dans la pratique, \(D\) évolue même si \({\text{p>p}}_{R}\) , on limite \(D\) à 0,99 maxi. \({D}_{c}\) est défini par le mot-clé D_CORR de DEFI_MATERIAU / CORR_ACIER
La même approche pour la convergence est retenue:
\(\mid f\mid \le \text{tol}.{\sigma}_{y}\) éq 4.1- 11
On se reportera à référence [bib1] et à [bib6] pour tous les détails concernant cette méthode et cet algorithme employés.
Calcul de la matrice tangente#
On cherche à calculer les matrices tangentes (continues et consistantes) pour la partie plastique et la partie d’endommagement. Les options RIGI_MECA_TANGet FULL_MECAde la matrice tangente sont calculées pour les élément fini 1D et 3D :
Elément fini 1D#
Dans le domaine plastique:
\(\delta {\varepsilon}^{p}=\delta \lambda =\frac{\delta {f}^{-}}{E+\frac{K}{m}{p}^{\frac{1}{m}-1}}=\frac{E\delta \varepsilon }{E+\frac{K}{m}{p}^{\frac{1}{m}-1}}\) éq 4.2.1-1
\(\frac{\partial \sigma }{\partial \Delta \varepsilon }=E(\delta \varepsilon -\delta {\varepsilon}^{p})=\frac{\frac{K}{m}{p}^{\frac{1}{m}-1}}{1+\frac{K}{\text{mE}}{p}^{\frac{1}{m}-1}}\) éq 4.2.1-2
Dans le domaine d’endommagement:
\(\frac{\delta \sigma }{1-D}+\frac{\sigma}{{(1-D)}^{2}}\delta D-R'(p)\delta p=-\delta {f}^{-}\)
\(\frac{-E}{{(1-D)}^{2}}\delta \lambda +\frac{\sigma}{{(1-D)}^{2}}\frac{{D}_{c}}{{p}_{R}-{p}_{D}}\frac{\delta \lambda }{(1-D)}-\frac{K}{m}{p}^{\frac{1}{m}-1}\frac{\delta \lambda }{(1-D)}=-\delta {f}^{-}=\frac{E}{(1-D)}\delta \varepsilon\)
\(\frac{\partial \sigma }{\partial \Delta \varepsilon }=E(\delta \varepsilon -\delta {\varepsilon}^{p})=E\frac{\frac{K}{m}(1-D){p}^{\frac{1}{m}-1}-\frac{\sigma}{(1-D)}\frac{{D}_{c}}{{p}_{R}-{p}_{D}}}{E+\frac{K}{m}(1-D){p}^{\frac{1}{m}-1}-\frac{\sigma}{(1-D)}\frac{{D}_{c}}{{p}_{R}-{p}_{D}}}\)
Elément fini 3D#
L’absence d’endommagement dans la partie plastique permet d’utiliser la matrice tangente calculée pour le comportement élastoplastique à écrouissage cinématique linéaire et isotrope non linéaire [bib7]:
\(\frac{\partial \sigma }{\Delta \varepsilon }={\lambda}^{\text{*}}\overrightarrow{1}\otimes \overrightarrow{1}+2{\mu}^{\text{*}}\text{Id}-\xi \frac{9{\mu}^{2}}{H(p)}(1-\frac{{R}^{'}(p).\Delta p}{(R(p)+{\sigma}_{y})})\frac{1}{{R}^{'}(p)+3\mu }(\frac{{\sigma}^{\text{dev}}}{(R(p)+{\sigma}_{y})}\otimes \frac{{\sigma}^{\text{dev}}}{(R(p)+{\sigma}_{y})})\) éq 4.2.2-1
avec \({\lambda}^{\text{*}}=K-\frac{2\mu }{\mathrm{3H}(\Delta p)}2{\mu}^{\text{*}}=\frac{2\mu }{H(\Delta p)}H(\Delta p)=1+\frac{3\mu \xi .\Delta p}{(R(p)+{\sigma}_{y})}\)
La matrice tangente initiale, utilisée par l’option RIGI_MECA_TANGest obtenue en adoptant le comportement du pas précédent (élastique ou plastique, signifié par une variable interne \(\xi\) valant 0 ou1) et en prenant \(\Delta p=0\) dans l’équation éq 4.2.2-2 .
En prenant en compte la présence de l’endommagement on obtient la matrice tangente suivante:
\(\begin{array}{c}\frac{\partial \sigma }{\partial \Delta \varepsilon }={\lambda}^{\text{*}}\overrightarrow{1}\otimes \overrightarrow{1}+2{\mu}^{\text{*}}\text{Id}-\xi \frac{9{\mu}^{2}}{H(p)}(1-\frac{\Delta p((1-D){R}^{'}(p)-R(p){D}^{'}(p))}{(1-D)(R(p)-{\sigma}_{y})})\frac{1}{(3\mu +(1-D){R}^{'}(p)-R(p){D}^{'}(p))}\\ (\frac{{\sigma}^{\text{dev}}}{(1-D)(R(p)+{\sigma}_{y})}\otimes \frac{{\sigma}^{\text{dev}}}{(1-D)(R(p)+{\sigma}_{y})})\end{array}\) éq 4.2.2-2
avec \({\lambda}^{\text{*}}=K-\frac{2\mu }{\mathrm{3H}(\Delta p)}2{\mu}^{\text{*}}=\frac{2\mu }{H(\Delta p)}H(\Delta p)=1+\frac{3\mu \xi .\Delta p}{(1-D)(R(p)-{\sigma}_{y})}\)
pour l’option FULL_MECA: \({\sigma}^{\mathrm{dev}}=\tilde{\sigma}\)
pour l’option RIGI_MECA_TANG: \({\sigma}^{\mathrm{dev}}=\tilde{\sigma}\)
Variables internes stockées#
Nous indiquons dans le tableau suivant les variables internes stockées en chaque point de Gauss pour le modèle de l’acier soumis à la corrosion:
Variable interne |
Sens physique |
V1 |
\(p\) : déformation plastique équivalente |
V2 |
\(D\) : variable d’endommagement |
V3 |
Indicateur de plasticité (0 si élastique, 1 si plastifié c’est-à-dire dès que p n’est pas nul) |
Bibliographie#
ORTIZ, J. C. SIMO : “An analysis of a new class of integration algorithms for elestoplastic constitutive relations“, Int. J. Numer. Meth. Engng., Vol. 21, pp 1561-1576, 1986.
A.A. ALMUSALLAM : “Effect of degree of corrosion on the properties of reinforcing steel bars”, Construction and Building Materials 15, 2001.
OUGLOVA, Y. BERTHAUD, I. PETRE-LAZAR: “Caractérisation expérimentale de la corrosion des aciers dans le béton sur des analogues anciens. Première approche de modélisation“, HT-25/02/030/A, EDF, 2002.
RAQUENEAU: “Fonctionnement dynamique des structures en béton-influence des comportements hystérétiques locaux“, thèse de l’Université Paris 6, LMT-Cachan, 1999.
“Relation de comportement élastoplastique à écrouissage cinématique linéaire et isotrope non linéaire. Modélisation 3D et contrainte planes“, [R5.03.16]
Vérification#
La loi de comportement CORR_ACIER est vérifiée par le cas test suivant:
SSNL127 |
Essai de traction avec le modèle CORR_ACIER |