v6.03.162 SSNP162 – Joints 2D et 3D pour les lois JOINT_MECA_RUPT et JOINT_MECA_FROT#
Résumé:
Ce test a pour objet la validation des éléments de joints hydro-mécaniques pour les lois de comportement des barrages JOINT_MECA_RUPT et JOINT_MECA_FROT.
On teste à la fois les modélisations mécaniques pures PLAN_JOINT en \(\mathrm{2D}\) (maille QUAD4,QUAD8) et 3D_JOINT en \(\mathrm{3D}\) (maille HEXA8, HEXA20 ou PENTA6,PENTA15) avec les deux lois en présence de pression imposée. Puis, toujours pour les même éléments quadratiques les modélisations hydro-mécaniques couplées PLAN_JOINT_HYME et C3D_JOINT_HYME, avec le profil de sous-pression obtenue dans le calcul.
Les éléments sur lesquels s’appuient ces modélisations sont les éléments de joints cohésifs standards.
Modélisation \(A\) : PLAN_JOINT maille QUAD4 avec JOINT_MECA_RUPT
Modélisation \(B\) : 3D_JOINTmaille HEXA8 avec JOINT_MECA_RUPT
Modélisation \(C\) : 3D_JOINTmaille PENTA6 avec JOINT_MECA_RUPT
Modélisation \(D\) : PLAN_JOINT maille QUAD4 avec JOINT_MECA_FROT
Modélisation \(E\) : 3D_JOINTmaille HEXA8 avec JOINT_MECA_FROT
Modélisation \(F\) : 3D_JOINTmaille PENTA6 avec JOINT_MECA_FROT
Modélisation \(G\) : PLAN_JOINT_HYME maille QUAD8 avec JOINT_MECA_RUPT
Modélisation \(H\) : 3D_JOINT_HYME maille HEXA20 avec JOINT_MECA_RUPT
Modélisation \(I\) : 3D_JOINT_HYME maille PENTA15 avec JOINT_MECA_RUPT
Modélisation \(J\) : PLAN_JOINT_HYME maille QUAD8 avec JOINT_MECA_FROT
Modélisation \(K\) : 3D_JOINT_HYME maille HEXA20 avec JOINT_MECA_FROT
Modélisation \(L\) : 3D_JOINT_HYME maille PENTA15 avec JOINT_MECA_FROT
Modélisation \(M\) : PLAN_JOINT maille QUAD8 avec JOINT_MECA_RUPT
Modélisation \(N\) : 3D_JOINTmaille HEXA20 avec JOINT_MECA_RUPT
Modélisation \(O\) : 3D_JOINTmaille PENTA15 avec JOINT_MECA_RUPT
Modélisation \(P\) : PLAN_JOINT maille QUAD8 avec JOINT_MECA_FROT
Modélisation \(Q\) : 3D_JOINTmaille HEXA20 avec JOINT_MECA_FROT
Modélisation \(R\) : 3D_JOINTmaille PENTA15 avec JOINT_MECA_FROT
Synth_se_des_r_sultats
Solution de référence#
Cas général#
Dans cette partie, on détaille la solution analytique en mode \(I\) pur dans sa forme \(\mathrm{3D}\) . Pour les calculs \(\mathrm{2D}\) plans, la solution est identique. La composante du saut et du vecteur contrainte suivant \(\tau\) n’interviennent pas, et il suffit de remplacer la surface \(S\) par la longueur \(L\) dans la solution.
Pour les chargements en mode de cisaillement, l’élément élastique n’intervient pas.
Dans un premier temps, le joint suit un chargement de type aller-retour en mode \(I\) ce qui permet de tester le profil de la courbe force déplacement à différents instants pour ce type chargement. Dans la deuxième partie, on charge d’une manière séquentielle en mode \(I\) , puis en mode \(\mathit{II}\) (ou \(\mathit{III}\) selon la modélisation). Ensuite on modifie le chargement en mode \(I\) et décharge en mode \(\mathit{II}\) . On sollicite ainsi le couplage entre les deux modes de chargement (on vérifie, par exemple, que la pente tangentielle évolue en fonction du chargement normal). On teste aussi le profil de la courbe force déplacement pour l’effort tangentiel.
En mode \(I\) pur#
On présente la solution analytique de la réponse globale du système écrite dans le repère local \((n,t,\tau )\) . On applique un chargement colinéaire à la normale: \(U=Un\) , l’élément cohésif s’ouvre en mode \(I\) pur et les contraintes tangentielles ainsi que les sauts tangentiels restent nuls. On se ramène donc à un problème scalaire. On note \(\sigma =n.\sigma .n\) l’unique composante non nulle du tenseur des contrainte de l’élément élastique dans le repère local:
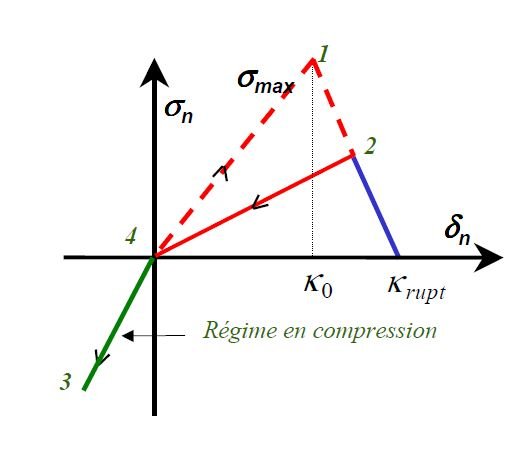
Fig. 645 Chargement aller-retour en mode \(I\) loi de JOINT_MECA_RUPT#
JOINT_MECA_RUPT
On présente la solution de la réponse globale du système joint+cube (voir document r7.01.25).
L’égalité des contraintes donne:
\(\left\{ \begin{array}{c}\sigma ={K}_{N}{\delta}_{n}\\ \sigma =E{\varepsilon}_{\mathit{cube}}=E(U-{\delta}_{n})/{L}_{\mathit{cube}}\end{array}\right.\) dans la zone élastique
\(\left\{ \begin{array}{c}\sigma ={\sigma}_{max}-{K}_{N}/{P}_{\mathit{rup}}({\delta}_{n}-{\sigma}_{max}/{K}_{N})\\ \sigma =E{\varepsilon}_{\mathit{cube}}=E(U-{\delta}_{n})/{L}_{\mathit{cube}}\end{array}\right.\) dans la zone d’adoucissement
Où \({L}_{\mathrm{cube}}=1\) est la longueur de l’arête du cube dans notre cas. On note l’ouverture maximale du joint jusqu’à la rupture complète par \({U}_{max}={\sigma}_{max}(1+{P}_{\mathit{rup}})/{K}_{N}\) et l’ouverture élastique maximale par \({U}_{\mathit{el}}={\sigma}_{max}({K}_{N}{L}_{\mathit{cube}}+E)/{K}_{N}E\) .
La solution est donnée par la fonction linéaire par morceaux:
La force testée est donc donnée par \(F=\sigma S\) où \(S\) correspond à la surface sur laquelle on applique le chargement.
Pour les modélisations hydro-mécaniques (modélisations G, H, I) la valeur de la force est donnée par : \(F=(\sigma -{p}_{\mathit{fluide}})S\) où \({p}_{\mathit{fluide}}\) désigne la pression du fluide contribuant à l’ouverture du joint.
JOINT_MECA_FROT
On présente la solution de la réponse globale du système joint plus cube (voir document r7.01.25).
L’égalité des contraintes donne:
\(\left\{ \begin{array}{c}\sigma ={K}_{N}{\delta}_{n}\\ \sigma =E{\varepsilon}_{\mathit{cube}}=E(U-{\delta}_{n})/{L}_{\mathit{cube}}\end{array}\right.\) dans la zone élastique
\(\left\{ \begin{array}{c}\sigma =c/\mu \\ \sigma =E{\varepsilon}_{\mathit{cube}}=E(U-{\delta}_{n})/{L}_{\mathit{cube}}\end{array}\right.\) dans la zone plastique
Où \({L}_{\mathrm{cube}}=1\) est la longueur de l’arête du cube dans notre cas. Comme la contrainte maximale en mode \(I\) pour la loi de Mohr-Coulomb est donnée par \({\sigma}_{max}=c/\mu\) , l’ouverture élastique maximale (seuil de traction élastique) est égale à \({U}_{\mathit{el}}={\sigma}_{max}({K}_{N}{L}_{\mathit{cube}}+E)/{K}_{N}E\) . On avance jusqu’à cette valeur de déplacement on vérifie la valeur de \(\sigma ={\sigma}_{max}=c/\mu\) , ensuite on impose le déplacement double est on vérifie que la valeur de contrainte n’évolue pas. Ensuite dans le domaine de compression la solution est toujours élastique \(\sigma ={K}_{N}{\delta}_{n}\) .
La force testée est donnée par \(F=\sigma S\) où \(S\) correspond à la surface sur laquelle on applique le chargement.
Pour les modélisations hydro-mécaniques (modélisations J, K, L) la valeur de la force est donnée par : \(F=(\sigma -{p}_{\mathit{fluide}})S\) où \({p}_{\mathit{fluide}}\) désigne la pression du fluide contribuant à l’ouverture du joint.
En mode \(\mathit{II}`et :math:\)mathit{III}`pur#
Le système écrite dans le repère local \((n,t,\tau )\) . On applique un chargement perpendiculairement à la normale directement sur le joint: \(U={U}_{t}\tau\) . L’élément cohésif s’ouvre en mode \(\mathit{II}\) . Si le chargement normale n’évolue pas on se ramène à un problème scalaire. On note \({\sigma}_{n}=n.\sigma .n\) , \({\sigma}_{\tau}=\tau .\sigma .n\) les contraintes dans le repère local.
Le chargement en mode \(I\) étant maintenu, on charge en mode \(\mathit{II}\) (ou \(\mathit{III}\) selon la modélisation). Le couplage entre les deux modes est ainsi sollicité. La solution varie en fonction de loi de comportement:
JOINT_MECA_RUPT
Quand le joint est partiellement ouvert (\({\delta}_{n}>0\) ) la pente tangentielle évolue en fonction de cette ouverture normale comme: \({K}_{T}^{\mathit{evol}}={K}_{T}\times (1-{\delta}_{n}/{L}_{\mathit{CT}})\) (voir document r7.01.25)
où \({L}_{\mathit{CT}}={\sigma}_{max}(1+{P}_{\mathit{rup}})/{K}_{N}\tan(\alpha \pi /4)\) est la longueur critique d’endommagement tangentiel. La solution est donnée par: \({\sigma}_{\tau}={K}_{T}^{\mathit{evol}}{U}_{t}\)
JOINT_MECA_FROT
On teste la courbe force-déplacement pour le joint, dont le chargement normal évolue. Le joint est partiellement fermé (\({\delta}_{n}>0\) ). La solution est le glissement simple de Mohr-Coulomb. \({\sigma}_{\tau}=-\mu {\sigma}_{n}+c\) . Cette courbe est testée à différents instants (voir Fig. 646):
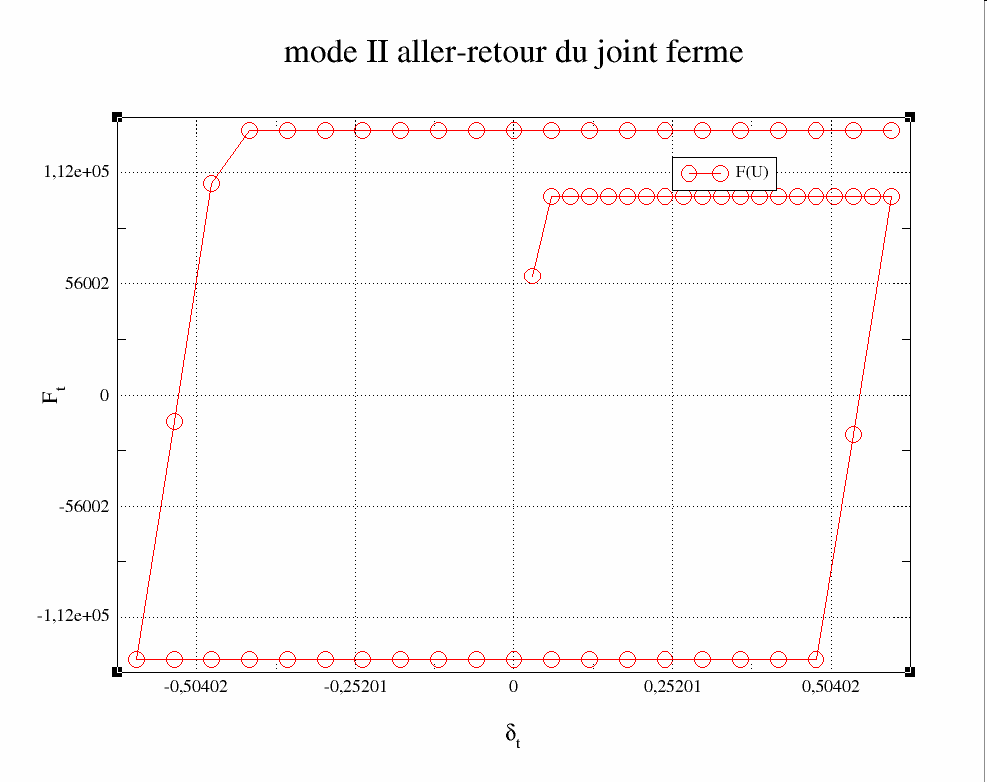
Fig. 646 Courbe force (tangente) déplacement pour la loi JOINT_MECA_FROT#
Modélisation A#
Validation du joint \(\mathrm{2D}\) avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT).
Caractéristiques du maillage#
Nombre de nœuds: 6
L’élément élastique est un QUAD4.
L’élément de joint est un QUAD4 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode \(I\)
On ouvre le joint jusqu’à l’endommagement partiel [1]_. \(U=\beta \times {U}_{\mathit{el}}+(1-\beta )\times {U}_{max}\) Où \(\beta =0.2\) . Ensuite il passe dans la zone de compression \(U=-{U}_{\mathit{el}}\) . Enfin le joint est mis en traction jusqu’à l’endommagement complet \(U={U}_{max}\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont analytiques (voir page 6 ).
Mode \(\mathrm{II}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathit{II}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale. Le caractère incrémental de l’évolution tangentiel fait modifier la contrainte tangentiel pendant la décharge partielle en mode \(I\) ce qui rend complex son estimation analytique. Nous la testont donc après la décharge par regression.
On note par:
\({\sigma}_{\mathit{pena}}={\sigma}_{max}{P}_{\mathit{cont}}\times (E+{L}_{\mathit{cube}}\times {K}_{N})/(E+{L}_{\mathit{cube}}\times {K}_{N}\times {P}_{\mathit{cont}})\)
\({\sigma}_{t}({\delta}_{n})={K}_{T}\times (1-{\delta}_{n}/{L}_{\mathit{CT}}){U}_{t}\)
Grandeur testée |
Référence |
Tolérance ( \(\text{\%}\) ) |
mode \(I\) |
||
FN, valeur au pic |
\({\sigma}_{max}\) , soit \(\mathrm{1.D05}\) |
0.10 |
FN, valeur endommagée |
\(\beta {\sigma}_{max}\) , soit \(\mathrm{2.D04}\) |
0.10 |
FN, valeur en compression |
\({\sigma}_{\mathrm{pena}}\) , soit \(-\mathrm{2.D05}\) |
0.10 |
mode \(\mathit{II}\) |
||
FT, pour deux valeurs de \({\delta}_{n}\) |
\({\sigma}_{t}({\delta}_{n})\) |
0.10 |
Modélisation B#
Validation du joint \(\mathrm{3D}\) avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 12
L’élément élastique est un HEXA8.
L’élément de joint est un HEXA8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Modes \(I\) et \(\mathrm{II}\)
Identiques à la modélisation A.
Mode \(\mathrm{III}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathrm{III}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale.
Modélisation C#
Validation du joint 3D avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 9
L’élément élastique est un PENTA6.
L’élément de joint est un PENTA6 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Modes \(I\) et \(\mathrm{II}\)
Identiques à la modélisation A. On note juste que \(\mathit{FN}=\mathit{SIGN}/2\) , car la superficie de contact vaut \(1/2\) .
Mode \(\mathrm{III}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathrm{III}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale.
Modélisation D#
Validation du joint \(\mathrm{2D}\) avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT).
Caractéristiques du maillage#
Nombre de nœuds: 6
L’élément élastique est un QUAD4.
L’élément de joint est un QUAD4 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode I
On ouvre le joint jusqu’à son seuil de résistance à la traction [1]_. \(U={U}_{\mathit{el}}\) Ensuite on tire d’avantage pour arriver à \(U=2{U}_{\mathit{el}}\) . Il passe dans la zone de compression \(U=-{U}_{\mathit{el}}/3\) . Enfin le joint est rechargé jusqu’à son point d’équilibre \(U=0\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement (voir page 6 ).
Mode \(\mathit{II}\)
Le joint est solicité en glissement enmode \(\mathit{II}\) . On testealors la valeur de l’adhésion \(c\) . Ensuite on modifie l’ouverture normale en mode \(I\) et on fait le glissement aller-retour en mode \(\mathit{II}\) pour \({U}_{t}=\pm {U}_{\mathit{el}}/3\) .
Grandeur testée |
Référence |
Tolérance ( \(\text{\%}\) ) |
mode \(I\) |
||
FN, valeur au pic |
\({\sigma}_{\max}\) soit 2.D05 |
0.10 |
FN, non variation de la valeur au pic |
\({\sigma}_{\max}\) soit 2.D05 |
0.10 |
FN, valeur en compression |
\({\sigma}_{max}/3\) soit -6.66666667D04 |
0.10 |
FN, valeur au point d’équilibre |
0.0 |
0.10 |
mode \(\mathrm{II}\) |
||
FT, valeur de l’adhésion |
\(C\) soit 1.D05 |
0.10 |
FT, valeur en glissement et l’adhésion |
\(-{K}_{N}{U}_{t}\mu -c\) soit -1.2445666D+06 |
0.10 |
FT, valeur en glissement et l’adhésion |
\({K}_{N}{U}_{t}\mu -c\) soit 1.244647D+06 |
0.10 |
Modélisation E#
Validation du joint \(\mathrm{3D}\) avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 12
L’élément élastique est un HEXA8.
L’élément de joint est un HEXA8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode mixte \(I\) , \(\mathit{II}\) , \(\mathit{III}\)
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation D, mais on y rajoute le chargement dans la troisième direction.
Modélisation F#
Validation du joint \(\mathrm{3D}\) avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 9
L’élément élastique est un PENTA6.
L’élément de joint est un PENTA6 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode mixte \(I\) , \(\mathit{II}\) , \(\mathit{III}\)
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation D, mais on y rajoute le chargement dans la troisième direction.
Modélisation G#
Validation du joint \(\mathrm{2D}\) \(\text{HYME}\) avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT_HYME).
Caractéristiques du maillage#
Nombre de nœuds: 13 (dont 3 nœuds avec degrés de liberté de pression)
L’élément élastique est un QUAD8.
L’élément de joint est un QUAD8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur le nœud \(\mathit{NS5}\) et on teste la même valeur sur le nœud \(\mathit{NS7}\) .
On teste la mécanique en mode \(I\) pur. On ouvre le joint jusqu’à l’endommagement partiel [1]_. \(U=\beta \times {\%}_{\mathit{el}}+(1-\beta )\times {\%}_{max}\) où \(\beta =0.2\) . Ensuite il passe dans la zone de compression \(U=-{U}_{\mathit{el}}\) . Enfin le joint est mis en traction jusqu’à l’endommagement complet \(U={U}_{max}\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement en tenant compte de la pression de fluide (voir page 6 ).
Modélisation H#
Validation du joint \(\mathrm{3D}\) \(\text{HYME}\) HEXA20 avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation en 3D pour l’élément élastique.
Modélisation 3D_JOINT_HYME pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 32 (dont 8 nœuds avec degrés de liberté de pression)
L’élément élastique est un HEXA20.
L’élément de joint est un HEXA20 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur les nœuds \(\mathit{NS19}\) et \(\mathit{NS20}\) et on teste la même valeur sur les nœuds \(\mathit{NS17}\) et \(\mathit{NS18}\) .
On teste la mécanique en mode \(I\) pur. On ouvre le joint jusqu’à l’endommagement partiel [1]_. \(U=\beta \times {U}_{\mathit{el}}+(1-\beta )\times {U}_{max}\) où \(\beta =0.2\) . Ensuite il passe dans la zone de compression \(U=-{U}_{\mathit{el}}\) . Enfin le joint est mis en traction jusqu’à l’endommagement complet \(U={U}_{max}\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement en tenant compte de la pression de fluide (voir page 6 ).
Modélisation I#
Validation du joint \(\mathrm{3D}\) \(\text{HYME}\) PENTA15 avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation en 3D pour l’élément élastique.
Modélisation 3D_JOINT_HYME pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 24 (dont 6 nœuds avec degrés de liberté de pression)
L’élément élastique est un PENTA15.
L’élément de joint est un PENTA15 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur le nœud \(\mathit{NS13}\) et on teste la même valeur sur les nœuds \(\mathit{NS14}\) et \(\mathit{NS15}\) .
On teste la mécanique en mode \(I\) pur. On ouvre le joint jusqu’à l’endommagement partiel [1]_. \(U=\beta \times {U}_{\mathit{el}}+(1-\beta )\times {U}_{max}\) où \(\beta =0.2\) . Ensuite il passe dans la zone de compression \(U=-{U}_{\mathit{el}}\) . Enfin le joint est mis en traction jusqu’à l’endommagement complet \(U={U}_{max}\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement en tenant compte de la pression de fluide (voir page 6 ).
Modélisation J#
Validation du joint \(\mathrm{2D}\) \(\text{HYME}\) avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT_HYME).
Caractéristiques du maillage#
Nombre de nœuds: 13 (dont 3 nœuds avec degrés de liberté de pression)
L’élément élastique est un QUAD8.
L’élément de joint est un QUAD8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur le nœud \(\mathrm{NS5}\) et on teste la même valeur sur le nœud \(\mathrm{NS7}\) .
Mode \(I\)
On ouvre le joint jusqu’à son seuil de résistance à la traction [1]_. \(U={U}_{\mathit{el}}\) Ensuite on tire d’avantage pour arriver à \(U=2{U}_{\mathit{el}}\) . Il passe dans la zone de compression \(U=-{U}_{\mathit{el}}/3\) . Enfin le joint est rechargé jusqu’à son point d’équilibre \(U=0\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement en tenant compte de la pression de fluide ce qui fait décalé la courbe normale vers le bas(voir page 6 ).
Mode \(\mathit{II}\)
Le joint est solicité en glissement mode \(\mathit{II}\) . On test alors la valeur de l’adhésion \(c\) . Ensuite on modifie l’ouverture normale en mode \(I\) et on fait le glissement aller-retour en mode \(\mathit{II}\) pour \({U}_{t}=\pm {U}_{\mathit{el}}/3\) . Les valeurs de référence sont obtenues analytiquement en tenant compte de la pression de fluide ce qui influence pas la courbe tangentielle (voir page 6 ).
Modélisation K#
Validation du joint \(\mathrm{3D}\) \(\text{HYME}\) HEXA20 avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation en 3D pour l’élément élastique.
Modélisation 3D_JOINT_HYME pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 32 (dont 8 nœuds avec degrés de liberté de pression)
L’élément élastique est un HEXA20.
L’élément de joint est un HEXA20 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur les nœuds \(\mathrm{NS19}\) et \(\mathrm{NS20}\) et on teste la même valeur sur les nœuds \(\mathrm{NS17}\) et \(\mathrm{NS18}\) .
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation E, mais on y rajoute le chargement dans la troisième direction.
Modélisation L#
Validation du joint \(\mathrm{3D}\) \(\text{HYME}\) PENTA15 avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation en 3D pour l’élément élastique.
Modélisation 3D_JOINT_HYME pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 24 (dont 6 nœuds avec degrés de liberté de pression)
L’élément élastique est un PENTA15.
L’élément de joint est un PENTA15 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Pour tester la partie hydraulique, on impose une pression \({p}_{\mathit{fluide}}=500\mathit{Pa}\) sur le nœud \(\mathrm{NS13}\) et on teste la même valeur sur les nœuds \(\mathrm{NS14}\) et \(\mathrm{NS15}\) .
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation E, mais on y rajoute le chargement dans la troisième direction.
Modélisation M#
Validation du joint \(\mathrm{2D}\) en quadratique avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT).
Caractéristiques du maillage#
Nombre de nœuds: 13
L’élément élastique est un QUAD8.
L’élément de joint est un QUAD8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode \(I\)
On ouvre le joint jusqu’à l’endommagement partiel [1]_. \(U=\beta \times {U}_{\mathit{el}}+(1-\beta )\times {U}_{max}\) Où \(\beta =0.2\) . Ensuite il passe dans la zone de compression \(U=-{U}_{\mathit{el}}\) . Enfin le joint est mis en traction jusqu’à l’endommagement complet \(U={U}_{max}\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont analytiques (voir page 6 ).
Mode \(\mathrm{II}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathit{II}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale. Le caractère incrémental de l’évolution tangentiel fait modifier la contrainte tangentiel pendant la décharge partielle en mode \(I\) ce qui rend complex son estimation analytique. Nous la testont donc après la décharge par regression.
On note par:
\({\sigma}_{\mathit{pena}}={\sigma}_{max}{P}_{\mathit{cont}}\times (E+{L}_{\mathit{cube}}\times {K}_{N})/(E+{L}_{\mathit{cube}}\times {K}_{N}\times {P}_{\mathit{cont}})\)
\({\sigma}_{t}({\delta}_{n})={K}_{T}\times (1-{\delta}_{n}/{L}_{\mathit{CT}}){U}_{t}\)
Grandeur testée |
Référence |
Tolérance ( \(\text{\%}\) ) |
mode \(I\) |
||
FN, valeur au pic |
\({\sigma}_{max}\) , soit \(\mathrm{1.D05}\) |
0.10 |
FN, valeur endommagée |
\(\beta {\sigma}_{max}\) , soit \(\mathrm{2.D04}\) |
0.10 |
FN, valeur en compression |
\({\sigma}_{\mathrm{pena}}\) , soit \(-\mathrm{2.D05}\) |
0.10 |
mode \(\mathit{II}\) |
||
FT, pour deux valeurs de \({\delta}_{n}\) |
\({\sigma}_{t}({\delta}_{n})\) |
0.10 |
Modélisation N#
Validation du joint \(\mathrm{3D}\) en quadratique avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 32
L’élément élastique est un HEXA20.
L’élément de joint est un HEXA20 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Modes \(I\) et \(\mathrm{II}\)
Identiques à la modélisation M.
Mode \(\mathrm{III}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathrm{III}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale.
Modélisation O#
Validation du joint 3D en quadratique avec la loi JOINT_MECA_RUPT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 24
L’élément élastique est un PENTA15.
L’élément de joint est un PENTA15 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Modes \(I\) et \(\mathrm{II}\)
Identiques à la modélisation M. On note juste que \(\mathit{FN}=\mathit{SIGN}/2\) , car la superficie de contact vaut \(1/2\) .
Mode \(\mathrm{III}\)
Le joint est ouvert en mode \(I\) jusqu’à l’endommagement partiel, ensuite il est sollicité en mode \(\mathrm{III}\) . On teste les pentes de rigidité tangentielles à deux valeurs d’ouverture normale.
Modélisation P#
Validation du joint \(\mathrm{2D}\) en quadratique avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation en déformations planes D_PLAN pour l’élément élastique.
Modélisation plan pour l’élément de joint (mot clé PLAN_JOINT).
Caractéristiques du maillage#
Nombre de nœuds: 13
L’élément élastique est un QUAD8.
L’élément de joint est un QUAD8 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode I
On ouvre le joint jusqu’à son seuil de résistance à la traction [1]_. \(U={U}_{\mathit{el}}\) Ensuite on tire d’avantage pour arriver à \(U=2{U}_{\mathit{el}}\) . Il passe dans la zone de compression \(U=-{U}_{\mathit{el}}/3\) . Enfin le joint est rechargé jusqu’à son point d’équilibre \(U=0\) . On teste la réponse globale (la résultante de la force nodale, FN) du système (joint et cube) dans le repère local. Les valeurs de référence sont obtenues analytiquement (voir page 6 ).
Mode \(\mathit{II}\)
Le joint est solicité en glissement enmode \(\mathit{II}\) . On test ealors la valeur de l’adhésion \(c\) . Ensuite on modifie l’ouverture normale en mode \(I\) et on fait le glissement aller-retour en mode \(\mathit{II}\) pour \({U}_{t}=\pm {U}_{\mathit{el}}/3\) .
Grandeur testée |
Référence |
Tolérance ( \(\text{\%}\) ) |
mode \(I\) |
||
FN, valeur au pic |
\({\sigma}_{\max}\) soit 2.D05 |
0.10 |
FN, non variation de la valeur au pic |
\({\sigma}_{\max}\) soit 2.D05 |
0.10 |
FN, valeur en compression |
\({\sigma}_{max}/3\) soit -6.66666667D04 |
0.10 |
FN, valeur au point d’équilibre |
0.0 |
0.10 |
mode \(\mathrm{II}\) |
||
FT, valeur de l’adhésion |
\(C\) soit 1.D05 |
0.10 |
FT, valeur en glissement et l’adhésion |
\(-{K}_{N}{U}_{t}\mu -c\) soit -1.2445666D+06 |
0.10 |
FT, valeur en glissement et l’adhésion |
\({K}_{N}{U}_{t}\mu -c\) soit 1.244647D+06 |
0.10 |
Modélisation R#
Validation du joint \(\mathrm{3D}\) en quadratique avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 32
L’élément élastique est un HEXA20.
L’élément de joint est un HEXA20 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode mixte \(I\) , \(\mathrm{II}\) , \(\mathrm{III}\)
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation P, mais on y rajoute le chargement dans la troisième direction.
Modélisation S#
Validation du joint \(\mathrm{3D}\) en quadratique avec la loi JOINT_MECA_FROT
Caractéristiques de la modélisation#
Modélisation 3D pour l’élément élastique.
Modélisation 3D_JOINT pour l’élément de joint
Caractéristiques du maillage#
Nombre de nœuds: 24
L’élément élastique est un PENTA6.
L’élément de joint est un PENTA6 dégénéré (nœuds confondus).
Grandeurs testées et résultats#
Mode mixte \(I\) , \(\mathrm{II}\) , \(\mathrm{III}\)
On ne fait que des tests de non regression, en mélangeant les modes de chargement. On applique le même chargement qu’en modélisation P, mais on y rajoute le chargement dans la troisième direction.