v6.08.105 SSND105 - Loi de comportement visco-élasto-plastique avec effet de mémoire#
Résumé:
Le problème est quasi-statique non-linéaire en mécanique des structures. Les lois testées, VMIS_CIN2_MEMO et VISC_CIN2_MEMO, sont des lois avec écrouissage cinématique non-linéaire, écrouissage isotrope, et mémoire de l’écrouissage maximum. On analyse la réponse en un point matériel, avec un pré-écrouissage, puis un chargement cyclique.
La modélisation A permet de valider l’effet de mémoire avec VMIS_CIN2_MEMO dans un cas où l’écrouissage est purement isotrope, pour une traction simple. La solution de référence pour cette modélisation est analytique.
La modélisation B compare les résultats obtenus avec effet de mémoire, et sans effet de mémoire entre les lois VISC_CIN2_MEMO et VISCOCHAB, pour un chargement cyclique avec pré-écrouissage.
La modélisation C est similaire à la modélisation B, et permet de valider les deux modèles en axisymétrique.
La modélisation D est similaire à la modélisation C, et permet de vérifier que les modèles pouvant prendre en compte l’effet de non proportionnalité donnent dans ce cas des résultats identiques aux modèles précédents.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
On peut calculer la solution analytique correspondant au pré-écrouissage (traction monotone, modélisation A):
Le système d’équations du problème avec effet de mémoires’écrit(20 équations)[R5.03.04]:
Élasticité : \(\tilde{\sigma}=2\mu (\tilde{\varepsilon}-{\varepsilon}^{p})\)
Critère de plasticité

Écoulement plastique :

avec

Écrouissage isotrope :

Mémoire d’écrouissage maximal:

où q est déterminé par:
un domaine

caractérisant les déformations plastiques maximales, dont q mesure le rayon et

le centre
\(\xi\) est calculé suivant une loi de normalité c’est à dire:

, avec

Sur la surface du domaine d’écrouissage maximal, on a \(F=0\) . En appliquant la condition \(\mathit{dF}=0\) , on obtient l’expression en vitesse:

Pour un point matériel en charge uni-axiale, les champs (uniformes) ont pour composantes:

Dans ce cas, lors de la première charge uni-axiale dans la direction x :

Dans ce cas,

, implique que

. Dans ce cas,

De plus, dans le cas d’un cycle de traction compression symétrique (en déformation plastique), on obtient, lors de la première décharge symétrique(avec

):




ce qui correspond bien au résultat attendu (cf. [bib2]): domaine \(F=0\) centré sur l’origine, et de rayon la demi-amplitude de déformation plastique.
Dans le cas d’une traction croissante, et si l’écrouissage cinématique est négligé, les équations à résoudre deviennent:

Il faut donc calculer la fonction

, telle que:

avec

.
De plus, on considère que l’on est en charge, donc


Il faut donc intégrer l’équation différentielle:

ce qui s’intègre de la façon suivante:

=>

Méthode de variation de la constante:



en intégrant:

d’où

La constante \(K\) est définie par les conditions initiales: pour \(p=0\) , \(R=0\)

soit

Finalement:

On a donc en charge: \(\sigma ={R}_{0}+R(p)\)
Résultats de référence#
Modélisation A:
Valeur de \(\mathit{SIXX}\) à l’instant final: \(\sigma ={R}_{0}+R(p)\)
avec

\(t=\mathrm{8s}\) , on doit retrouver \(\mathit{SIXX}=120\mathit{Mpa}\) .
Pour cela on calcul \(R(p)\) à partir de la valeur de \(p\) à l’instant \(t=\mathrm{8s}\) .
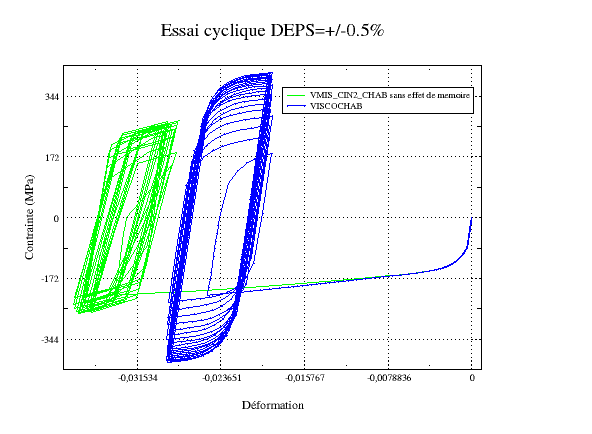
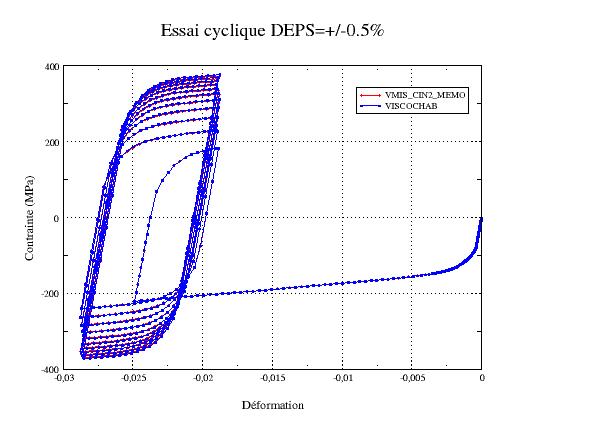
Modélisation B:
On comparera les résultats obtenues avec VISC_CIN2_MEMO avec ceux obtenus avec VISCOCHAB, à la fin du pré-écrouissage et au bout de 10 cycles. Les courbes ci-dessous mettent en évidence de l’effet de mémoire (par comparaison avec VISC_CIN2_CHAB qui ne le modélise pas ): après un pré-écrouissage, les cycles à déformation imposée se stabilisent à une amplitude de contraintes supérieure à celle obtenue sans effet de mémoire:
Incertitude sur la solution#
Modélisation A: analytique
Modélisation B: inter-comparaison entre VISCOCHAB et VISC_CIN2_MEMO: précision de l’intégration numérique, estimée à moins de \(\text{1\%}\) .
Modélisation C : validation ddes comportements en 2D AXIS ; les résultats doivent être identiques à ceux de la modélisation B.
Références bibliographiques#
R5.03.04 «Comportements élasto-visco-plastiques de J.L.Chaboche».
J.M.PROIX «Comportement viscoplastique prenant en compte la non proportionnalité du chargement» EDF R&D-CR-AMA12-284, 12/12/12
Modélisation A#
Caractéristiques de la modélisation#
Modélisation 3D, 1 hexa8. Traction simple.
Grandeurs testées et résultats#
Identification |
Référence |
tolérance |
\({\sigma}_{xx}\) |
\(120\) |
0.20% |
\(p\) |
\(3.70925E–2\) |
0.10% |
Modélisation B#
Caractéristiques de la modélisation#
Pré-écrouissage en traction puis cycles à déformation imposée, comparaison VISCOCHAB et VISC_CIN2_MEMO. 250 pas de temps pour 10 cycles.
Grandeurs testées et résultats#
Identification |
Instant |
VISCOCHAB |
VISC_CIN2_MEMO |
\(\text{\%}\) différence |
\({\sigma}_{xx}\) |
\(10\) |
\(220\) |
\(220\) |
0 |
\({\sigma}_{xx}\) |
\(11\) |
0 |
0 |
0 |
\({\sigma}_{xx}\) |
\(113.5\) |
\(3.75459E+02\) |
\(3.72353E+02\) |
\(-0.8\) |
\({\varepsilon}_{xx}\) |
\(113.5\) |
\(-1.87638E-02\) |
\(-1.87638E-02\) |
0 |
Remarques#
La différence de \(\text{0.8\%}\) sur les contraintes à l’instant final s’estompe si on raffine le pas de temps: avec un pas de temps 2 fois plus fin, l’écart devient \(\text{0.4\%}\) .
Modélisation C#
Caractéristiques de la modélisation#
Pré-écrouissage en traction puis cycles à déformation imposée, comparaison VISCOCHAB et VISC_CIN2_MEMO. 250 pas de temps pour 10 cycles. Modélisation 2D AXIS.
Grandeurs testées et résultats#
Identification |
Instant |
VISCOCHAB |
VISC_CIN2_MEMO |
\(\text{\%}\) différence |
\({\sigma}_{xx}\) |
\(113.5\) |
\(3.75459E+02\) |
\(3.72353E+02\) |
\(-0.8\) |
\({\varepsilon}_{xx}\) |
\(113.5\) |
\(-1.87638E-02\) |
\(-1.87638E-02\) |
Modélisation D#
Caractéristiques de la modélisation#
Cette modélisation est identique à la modélisation C, avec des modèles de type NRAD (non radialité).Les résultats des modèles VISC_MEMO_NRAD et VISC_CIN2_NRAD peuvent être comparés à ceux de la modélisationC, puisque l’effet de non radialitédoit être inopérant ici. Les tests de VMIS_MEMO_NRAD, VMIS_CIN2_NRAD(sans viscosité) sont de non régression.
Grandeurs testées et résultats#
Comportement VISC_MEMO_NRAD
Identification |
Instant |
Référence VISC_CIN2_MEMO |
\({\sigma}_{xx}\) |
\(113.5\) |
\(369.679\) |
\({\varepsilon}_{xx}\) |
\(113.5\) |
\(-1.8773E-02\) |
Comportement VISC_CIN2_NRAD
Identification |
Instant |
Référence VISC_CIN2_CHAB |
\({\sigma}_{xx}\) |
\(113.5\) |
\(269.6\) |
\({\sigma}_{xx}\) |
\(10\) |
\(220\) |
Comportement VMIS_MEMO_NRAD
Identification |
Instant |
Référence |
\({\sigma}_{xx}\) |
\(113.5\) |
\(372.2\) (non régression) |
\({\sigma}_{xx}\) |
\(10\) |
\(220\) (analytique) |
Comportement VMIS_CIN2_NRAD
Identification |
Instant |
Référence VISC_CIN2_MEMO |
\({\sigma}_{xx}\) |
\(113.5\) |
\(225.254\) (non régression) |
\({\sigma}_{xx}\) |
\(10\) |
\(220\) (analytique) |
Synthèse des résultats#
Les quatre modélisations permettent de valider, sur un point matériel, les comportements de type cinématique non linéaire à effet de mémoire, en plasticité et en viscoplasticité.