v1.04.116 PETSC01 - Validation du solveur PETSc en élasticité linéaire 3D#
Résumé :
Ce cas-test permet de valider le solveur PETSC en élasticité linéaire \(\mathrm{3D}\) sous différentes configurations:
Commandes éclatées ou opérateurs globaux
Dualisation et élimination des conditions aux limites (AFFE_CHAR_CINE/MECA)
Utilisation de PETSC avec la méthode NEWTON_KRYLOV dans l’opérateur de dynamique non-linéaire
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
La solution de référence est celle obtenue sur le même maillage avec le code PERMAS, calculs réalisés en 1997.
Résultats de référence et grandeurs testées#
Localisation |
Référence ( \(\mathrm{mm}\) ) |
Précision |
Point \(F’\) \(\mathrm{DY}\) \(\mathrm{DZ}\) |
1. 10–2 1.0296 10–4 |
1.5E-4 1.5E-4 |
Point \(\mathrm{B5}’\) \(\mathrm{DX}\) \(\mathrm{DY}\) \(\mathrm{DZ}\) |
4.3006 10–3 9.2890 10–3 -2.9173 10–5 |
1.5E-4 1.5E-4 1.5E-4 |
Modélisation de référence#
Modélisation commune à tous les tests#
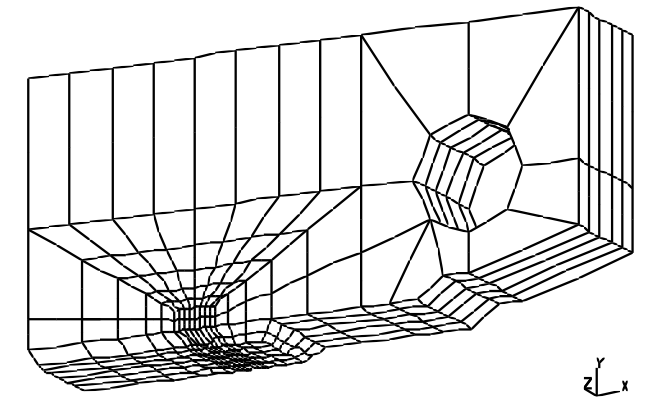
Maillage: Nombre de nœuds : 3323 Nombre de mailles : 630 HEXA20
Découpage: |
Face1 \((A,\mathrm{B1},\mathrm{...},\mathrm{B5},C,D,E)\) |
428 nœuds |
Face2 \((A,\mathrm{B0},\mathrm{B0}',A')\) |
198 nœuds |
|
Segment \(\mathrm{FF}’\) |
11 nœuds |
|
Nom des nœuds: |
Point \(F’=\mathrm{NO2958}\) |
Point \(\mathrm{B5}’=\mathrm{NO2974}\) |
Conditions aux limites:
en tous les nœuds de la \(\mathrm{Face1}\) |
(GROUP_NO=”Grno1”, DZ=0) |
en tous les nœuds de la \(\mathrm{Face2}\) |
(GROUP_NO=”Grno8”, DY=0) |
en tous les nœuds du segment \(\mathrm{FF}’\) |
(GROUP_NO=”Grno7”, DX=0, DY=0.01) |
Modélisation A#
Opérateur de résolution MECA_STATIQUE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithmes CR et CG (avec pré-conditionnement LDLT incomplet avec niveau de remplissage 0 et renumérotation RCMK).
Modélisation B#
Opérateur de résolution STAT_NON_LINE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithme CR (avec pré-conditionnement LDLT incomplet avec niveau de remplissage 0 et renumérotation RCMK).
Modélisation C#
Commandes éclatées CALC_MATR_ELEM, FACTORISERet RESOUDRE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et CALC_CHAR_CINE).
Solveur PETSC, algorithme CR (avec pré-conditionnement LDLT incomplet avec niveau de remplissage 0 et renumérotation RCMK).
Modélisation D#
Opérateur de résolution MECA_STATIQUE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithme CR (pré-conditionnement LDLT_SP de factorisation simple précision et sans renumérotation).
Modélisation E#
Opérateur de résolution STAT_NON_LINE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithme CR (pré-conditionnement LDLT_SP de factorisation simple précision et sans renumérotation).
Modélisation F#
Commandes éclatées CALC_MATR_ELEM, FACTORISERet RESOUDRE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et CALC_CHAR_CINE).
Solveur PETSC, algorithme CR (pré-conditionnement LDLT_SP de factorisation simple précision et sans renumérotation).
On vérifie l’export et l’import de vecteurs PETSc dans un champ aux nœuds avec les méthodes toPetsc et fromPetsc.
Modélisation G#
Opérateur de résolution MECA_STATIQUE.
Élimination des conditions aux limites cinématiques (AFFE_CHAR_CINE).
Solveur PETSC, algorithmes CR et GCR (5 résolutions sans renumérotation avec respectivement pré-conditionnement JACOBI, pré-conditionnement SOR, SANS pré-conditionnement, préconditionnement ML et pré-conditionnement BOOMER).
Modélisation H#
Opérateur de résolution DYNA_NON_LINE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithme GMRES (pré-conditionnement LDLT_SP par factorisation simple précision).
Modélisation I#
Opérateur de résolution DYNA_NON_LINE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithme GMRES (pré-conditionnement LDLT_SP par factorisation simple précision).
Utilisation de la méthode NEWTON_KRYLOV à la place de la méthode NEWTON.
Modélisation J#
Opérateur de résolution MECA_STATIQUE.
Dualisation et élimination des conditions aux limites cinématiques (AFFE_CHAR_MECA et AFFE_CHAR_CINE).
Solveur PETSC, algorithmes CG etGMRESavec pré-conditionnement de type Lagrangien augmenté BLOC_LAGR.
Synthèse des résultats#
Ce cas-test montre le bon fonctionnement du solveur PETSC dans les différents cas étudiés.