v6.04.263 SSNV263 – Plasticité à écrouissage isotrope non linéaire VMIS_ISOT_NL sous chargement triaxial et cisaillement#
Résumé:
Ce test a pour but de valider l’algorithme d’intégration de la loi de comportement VMIS_ISOT_NL. Le problème étudié correspond à un cylindre creux soumis à un état de contrainte triaxial + cisaillement dont les composantes sont constantes (en espace) dans le repère cylindrique.
Le problème est mis en œuvre:
en AXIS_SIdans la modélisation A
en AXIS_GRAD_VARI dans la modélisation B
en 3Ddans la modélisation C
en 3D_GRAD_VARI dans la modélisation D
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
On cherche à imposer un état de contrainte à symétrie axiale et dont les composantes \({\sigma}_{\mathit{rr}}\) , \({\sigma}_{\theta \theta }\) , \({\sigma}_{zz}\) et \({\sigma}_{\mathit{rz}}\) ne dépendent pas de la position \((r,z)\) . On se restreint en outre à la situation où \({\sigma}_{\mathit{rr}}={\sigma}_{\theta \theta }\) . Les équations d’équilibre dans le volume sont vérifiées pour peu qu’on impose une force volumique verticale:
\({f}_{z}=-\frac{{\sigma}_{\mathit{rz}}}{r}\)
Les équations d’équilibre aux bords du cylindre nécessitent d’imposer des efforts surfaciques \(T\) égaux à \(\sigma \cdot n\) où \(n\) désigne la normale sortante à la surface. Ils s’écrivent:
bord supérieur \(z=H\) : \(T={\sigma}_{zz}{e}_{z}+{\sigma}_{\mathit{rz}}{e}_{r}\)
bord inférieur \(z=0\) : \(T=-{\sigma}_{zz}{e}_{z}-{\sigma}_{\mathit{rz}}{e}_{r}\)
paroi intérieure \(r={R}_{i}\) : \(T=-{\sigma}_{\mathit{rr}}{e}_{r}-{\sigma}_{\mathit{rz}}{e}_{z}\)
paroi extérieure \(r={R}_{e}\) : \(T={\sigma}_{\mathit{rr}}{e}_{r}+{\sigma}_{\mathit{rz}}{e}_{z}\)
Le champ de contrainte est alors à l’équilibre avec le chargement imposé.
Compte-tenu de la forme des équations de comportement, notamment leur isotropie, les composantes du champ de déformation dans le repère cylindrique sont également constantes (en espace) et se limitent à \({\epsilon}_{\mathit{rr}}={\epsilon}_{\theta \theta }\) , \({\epsilon}_{zz}\) et \({\epsilon}_{\mathit{rz}}\) . Ce champ de déformation est géométriquement compatible avec le champ de déplacement (à symétrie axiale) suivant:
\({u}_{r}={\epsilon}_{\mathit{rr}}r;{u}_{z}={\epsilon}_{zz}z+2{\epsilon}_{\mathit{rz}}(r-{R}_{i})\)
où on a fixé la constante d’intégration de sorte que \({u}_{z}({R}_{i},0)=0\) , condition aux limites qui bloquele mouvement de corps rigide.
Il reste maintenant à fixer le trajet du transitoire dans l’espace des contraintes. Pour simplifier l’intégration du comportement, on opte pour un trajet radial monotone. On impose ainsi la contrainte sous la forme \(\sigma =q{\Sigma}^{0}\) , où \(q\ge 0\) désigne l’intensité des contraintes. On choisit lescomposantes suivantes pour \({\Sigma}^{0}\) dans le repère cylindrique:
\({\Sigma}_{\mathit{rr}}^{0}={\Sigma}_{\theta \theta }^{0}=\frac{1}{6};{\Sigma}_{zz}^{0}=\frac{2}{3};{\Sigma}_{\mathit{rz}}^{0}=\frac{1}{2}\)
C’est un tenseur dont la contrainte équivalente de vonMises est égale à 1, si bien que \({\sigma}_{\mathit{eq}}=q\) . On note \({N}^{0}\) son déviateur. L’équation d’évolution de la déformation plastique s’intègre aisément puisque la direction est fixe et égale à \({N}^{0}\) :
\({\epsilon}^{p}=\frac{3}{2}\kappa {N}^{0}\)
La variable d’écrouissage \(\kappa\) ne dépend (en charge plastique) que de la contrainte équivalente \(q\) , via l’équation de cohérence:
\(q=R(\kappa )={R}_{0}+{R}_{H}\kappa +{R}_{1}(1-{e}^{-{\gamma}_{1}\kappa })+{R}_{2}(1-{e}^{-{\gamma}_{2}\kappa })+{R}_{K}{(\kappa +{p}_{0})}^{{\gamma}_{M}}\)
Il est évidemment plus simple de se donner une valeur cible pour \(\kappa\) (5%, par exemple) et en déduire le chargement \(q\) requis (830.364 MPa).
Enfin, la déformation élastique se déduit directement de la contrainte:
\({\epsilon}^{e}=q\left[\frac{1-\nu }{E}{\Sigma}^{0}-\frac{\nu}{E}\mathit{tr}{\Sigma}^{0}\mathit{Id}\right]\)
Elle permet de remonter à la déformation \(\epsilon ={\epsilon}^{e}+{\epsilon}^{p}\) et aux déplacements.
Dans le cas d’une formulation à gradient de plasticité, les résultats restent inchangés. En effet, la variable d’écrouissage \(\kappa\) est homogène, si bien que son gradient est nul: les effets non locaux n’apparaissent pas dans ce problème (aux erreurs de discrétisation spatiale près).
Enfin, on peut également appliquer l’histoire des déplacements en tout point de la structure pour retrouver la réponse en contrainte. On tire profit de cette démarche pour tester également le cas avec plateau de Lüders dans l’écrouissage (une démarche en contrainte n’est alors pas possible en raison du caractère plastique parfait du plateau). Les contraintes sont inchangées au-delà du plateau et bloquées à la contrainte équivalente du plateau pour des déformations inférieures à la limite du plateau.
Résultats de référence#
On s’assurera qu’en ciblant une déformation plastique cumulée de 5%, le modèle retrouve bien les niveaux de contraintes (\({\sigma}_{\mathit{rr}}\) ), de déplacements et de déformations plastiques (\({\epsilon}_{\mathit{rz}}^{p}\) ) attendus.
Incertitudes sur la solution#
Néant.
Références bibliographiques#
Néant
Modélisation A#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation AXIS_SI.
Caractéristiques du maillage#
Le maillage est structuré et comprend 30 mailles quadrangulaires quadratiques (QUAD8).
Grandeurs testées et résultats de la modélisation A#
On teste la contrainte, la déformation plastique et le déplacement à l’issue de la phase de chargement au point \(r={R}_{\mathit{ext}}\) , \(z=H\) .
Identification |
Référence |
Type |
Tolérance |
SIXX |
138.394 MPa |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
DX |
-1.285 mm |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
DY |
4.438 mm |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
V6(EPSPXY) |
\(3.75\times {10}^{-2}\) |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
Modélisation B#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation AXIS_GRAD_VARI.
Caractéristiques du maillage#
Identiques à la modélisation A.
Grandeurs testées et résultats de la modélisation B#
Identiques à la modélisation A.
Modélisation C#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation 3D.
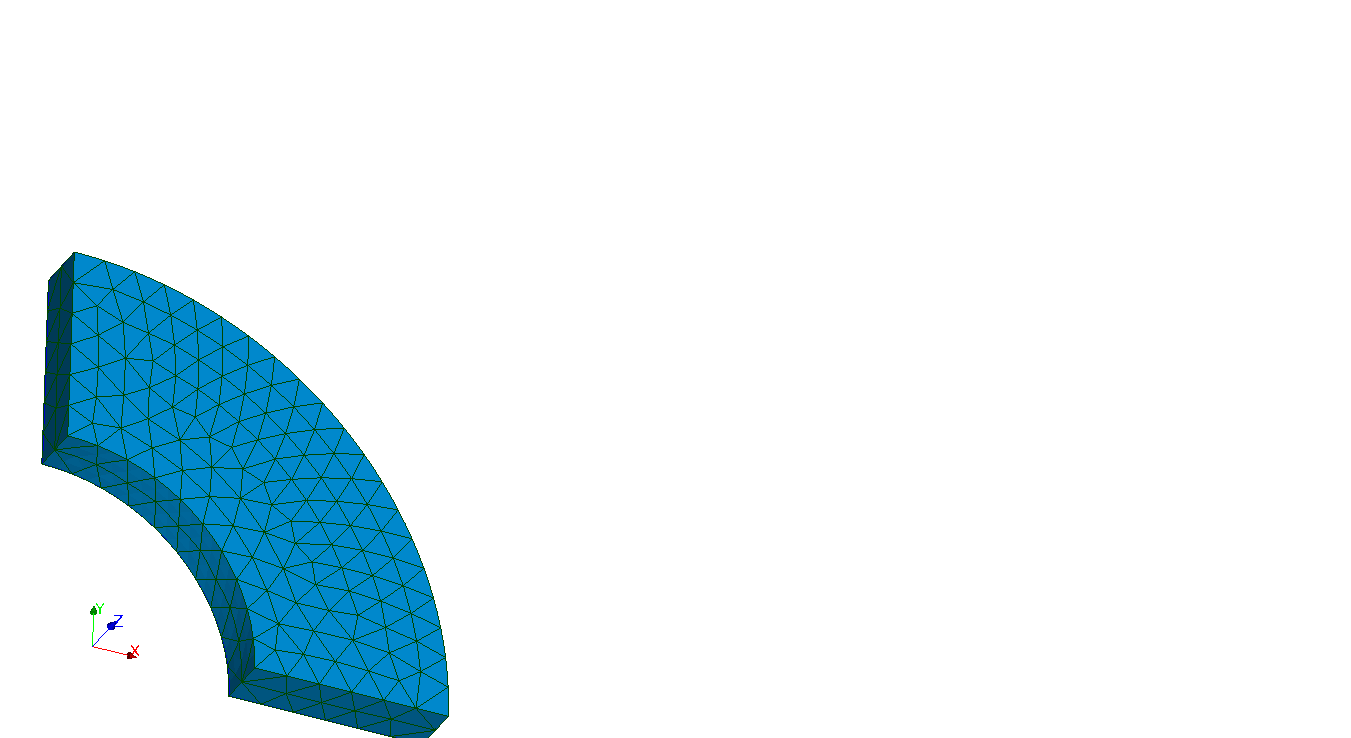
Caractéristiques du maillage#
Le maillage est non structuré et comprend 1550tétraèdres quadratiques (TETRA10).
Grandeurs testées et résultats de la modélisation C#
On teste la contrainte, la déformation plastique et le déplacement à l’issue de la phase de chargement au point \(r={R}_{\mathit{ext}}\) , \(z=H\) (sur la face avant, de sorte que \({e}_{r}={e}_{x}\text{}\) et \({e}_{\theta}={e}_{y}\) ).
Identification |
Référence |
Type |
Tolérance |
SIXX |
138.394 MPa |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
DX |
-1.285 mm |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
DZ |
4.438 mm |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
V7(EPSPXZ) |
\(3.75\times {10}^{-2}\) |
ANALYTIQUE |
RELATIF \({10}^{-3}\) |
Modélisation D#
Caractéristiques de la modélisation#
Il s’agit d’une modélisation 3D_GRAD_VARI.
Caractéristiques du maillage#
Identiques à la modélisation C.
Grandeurs testées et résultats de la modélisation D#
Identiques à la modélisation C.
Synthèse des résultats#
On note un très bon accord entre la modélisation et la solution de référence, y compris en 3D où le maillage reste relativement grossier.