r5.03.27 Comportements mécaniques pour les simulations numériques#
Résumé :
Le comportement du matériau est une donnée d’entrée incontournable dans la plupart des études mécaniques. Dans une simulation numérique ce comportement est pris en compte par l’intermédiaire d’un modèle plus ou moins complexe, supposé reproduire de façon suffisamment précise le comportement du matériau réel. Les paramètres contrôlant le modèle auront été ajustés au préalable à partir de données expérimentales.
Tout modèle étant une représentation simplifiée et inexacte de la réalité, il est essentiel de s’assurer que les choix de formulation ainsi que le jeu de paramètres choisi est pertinent pour l’ensemble du domaine de sollicitations caractérisant l’étude.
Dès que l’on sort des cas simples où l’on peut se contenter d’un comportement élastique linéaire ou d’un comportement plastique à écrouissage isotrope, le choix d’un modèle de comportement et son recalage pour un matériau donné est un processus long et délicat, qui nécessite de disposer de données expérimentales pertinentes qu’il n’est pas toujours facile de collecter.
Ce document est complémentaire à [U2.04.03] qui donne des conseils à un utilisateur souhaitant réaliser des calculs avec des comportements non-linéaires de type élasto-plastique ou élasto-visco-plastique pour choisir une loi adaptée aux modélisations envisagées.
Prise en compte du comportement mécanique dans les simulations numériques#
Dans bien des cas une loi de comportement élastique isotrope est suffisante, par exemple pour une étude de dimensionnement pour laquelle on se contente généralement de vérifier que la contrainte maximale ne dépasse pas une valeur seuil (limite d’élasticité, seuil d’endurance en fatigue, etc.). Les seuls paramètres de comportement à définir sont le module d’Young \(E\) et le coefficient de Poisson \(\nu\) .
Pour les études anisothermes, il suffit de remplacer les paramètres scalaires \(E\) et \(\nu\) par des fonctions tabulées en température.
Lorsqu’il est nécessaire de prendre en compte le comportement plastique du matériau, la solution la plus simple est d’utiliser directement une courbe de traction uni-axiale expérimentale que l’on aura préalablement tabulée sous la forme d’une évolution de la contrainte en fonction de la déformation. Dans le code de calcul Code_Aster des formulations telles que VMIS_ISOT_TRAC permettent lors de la résolution de généraliser la courbe uni-axiale à des trajets de chargements multi-axiaux.
Ce type de modèle présente l’avantage d’une mise en œuvre très simple dans la mesure où l’on s’affranchit de toute étape d’identification des paramètres d’une loi de comportement puisque l’on utilise directement une courbe de traction expérimentale. Il faut cependant garder à l’esprit que ces modèles intègrent implicitement l’hypothèse d’un comportement purement isotrope du matériau.
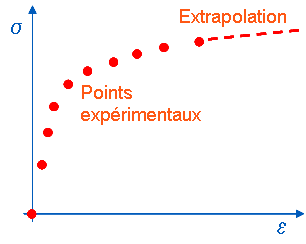
Figure 2-1: Utilisation d’une courbe de traction comme modèle de comportement
Bien que les matériaux réels présentent généralement une part d’écrouissage cinématique, l’approximation par un comportement purement isotrope n’est pas nécessairement pénalisante, sous réserve que le trajet de chargement en tout point de la structure étudiée respecte certaines conditions précisées ci-après.
Afin de mettre en évidence les limites de l’hypothèse de comportement isotrope, nous considérons le cas limite d’un matériau dont le comportement réel en écrouissage est purement cinématique et nous considérons un point matériel soumis à un chargement uni-axial croissant puis décroissant. Tant que le trajet de chargement en tout point de la structure reste monotone, l’hypothèse d’isotropie n’a aucune incidence. Si l’on obtient une décharge locale modérée, le modèle reste pertinent. Cependant, si la décharge s’accentue, le modèle prédira une réponse élastique jusqu’à une contrainte de compression équivalente à la contrainte maximum de traction atteinte précédemment (la réponse du modèle est représentée par une courbe en trait continu sur la figure). La réponse réelle du matériau est représentée en trait pointillé. Si le matériau réel est purement cinématique, on constate que l’entrée en plasticité en compression se produit beaucoup plus tôt que ce que prévoit le modèle de comportement isotrope, et que l’écart entre la contrainte calculée et la contrainte réelle peut être significatif.
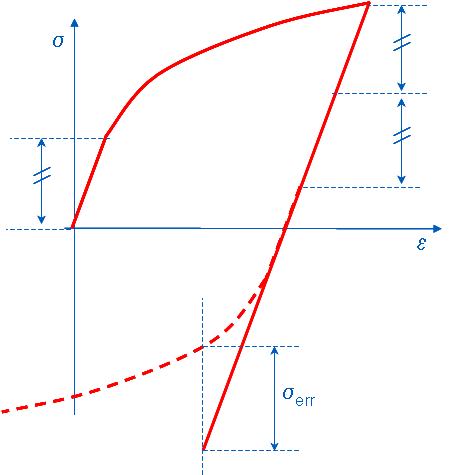
Figure 2-2: Écart entre comportement isotrope et comportement réel
L’illustration présentée ici correspond à une situation très défavorable, notamment du fait que nous supposons un matériau dont le comportement réel est purement cinématique, mais il est important dans toute étude utilisant ce type de comportement d’être vigilant vis-à-vis de ce type d’erreur. Il faut souligner également qu’une faible décroissance du chargement global peut se traduire par une décharge beaucoup plus importante en certains points de la structure. Il est donc souhaitable de faire une vérification sur l’ensemble du champ de contraintes tout au long de la simulation.
Les simulations anisothermes sont relativement simples avec ce type de mise en données. On fournit au code de calcul plusieurs courbes de traction correspondant à des températures différentes et le code prend en charge l’interpolation en température entre les différentes courbes.
Si l’étude à réaliser nécessite de prendre en compte un comportement plus complexe que ceux que nous venons d’aborder dans le début de ce chapitre, il est nécessaire d’utiliser une loi de comportement s’appuyant sur une formulation mathématique (généralement sous la forme d’équation différentielle).
Plusieurs étapes sont alors nécessaires avant de réaliser la simulation numérique proprement dite:
Le choix de la formulation devra être effectué en cohérence avec les phénomènes physiques que l’on souhaite prendre en compte.
On collecte les données expérimentales pertinentes pour le calage du modèle avec pour objectif de couvrir au mieux le domaine de sollicitation subi par la structure (en complétant par des essais complémentaires si nécessaire).
On effectue ensuite l’identification des paramètres du modèle afin que la réponse numérique soit la plus proche possible des résultats expérimentaux.
Il est fréquent d’éviter tout le processus d’identification lorsque l’on dispose d’une loi et d’un jeu de paramètres obtenus dans une étude comparable sur le même matériau ou issus d’une thèse ou d’un article.
Dans ce cas, il est important de garder à l’esprit que, quelle que soit sa complexité, un modèle de comportement ne propose qu’une reproduction simplifiée et donc imparfaite de la réaction du matériau. Il n’est utilisable que sur un domaine de sollicitation mécanique limité, qui correspond généralement à la plage de sollicitation couverte par les données expérimentales utilisées pour son identification. La réutilisation d’une formulation et de paramètres préexistants peut donc s’avérer risquée si l’on de dispose pas également d’information précise quant au domaine de validité de la loi que l’on souhaite utiliser.
A titre d’illustration on compare sur la figure 2-3 les trajets de chargements expérimentaux et simulés pour des chargements cycliques à différents niveaux d’amplitude. La loi de comportement utilisée a été identifiée sur une plage d’amplitude de déformation totale comprise entre \(\pm 0,2\text{\%}\) et \(\pm 0,7\text{\%}\) (avec des essais à des chargements intermédiaires à \(\pm 0,3\) et \(\pm 0,5\text{\%}\) ). On peut donc considérer que cette plage d’amplitude correspond a priori au domaine de validité de la loi en termes d’amplitude de déformation.
L’essai le moins chargé a été réalisé sous une amplitude de \(\pm 0,15\text{\%}\) . Ce niveau est proche de la limite du domaine de validité et la loi de comportement semble pertinente malgré une légère extrapolation.
L’essai à \(\pm 0,4\text{\%}\) est situé dans le domaine de validité. L’interpolation entre les résultats à \(\pm 0,3\) et \(\pm 0,5\text{\%}\) utilisée pour l’identification s’avère satisfaisante.
Pour les deux essais à \(\pm 1\text{\%}\) et \(\pm 1,2\text{\%}\) on constate que l’extrapolation du modèle vers des amplitudes de chargement nettement supérieures à la limite du domaine de validité conduit à une sous-estimation significative de l’amplitude de contrainte simulée.
On retiendra que la connaissance (et le respect) du domaine de validité de la loi mise en œuvre sont des ingrédients essentiels quant à la qualité du résultat d’une simulation numérique. En cas d’absence d’informations précises sur le domaine de validité d’une loi «recyclée», il est fortement recommandé de confronter le modèle à quelques résultats expérimentaux bien choisis avant de l’utiliser dans une simulation.
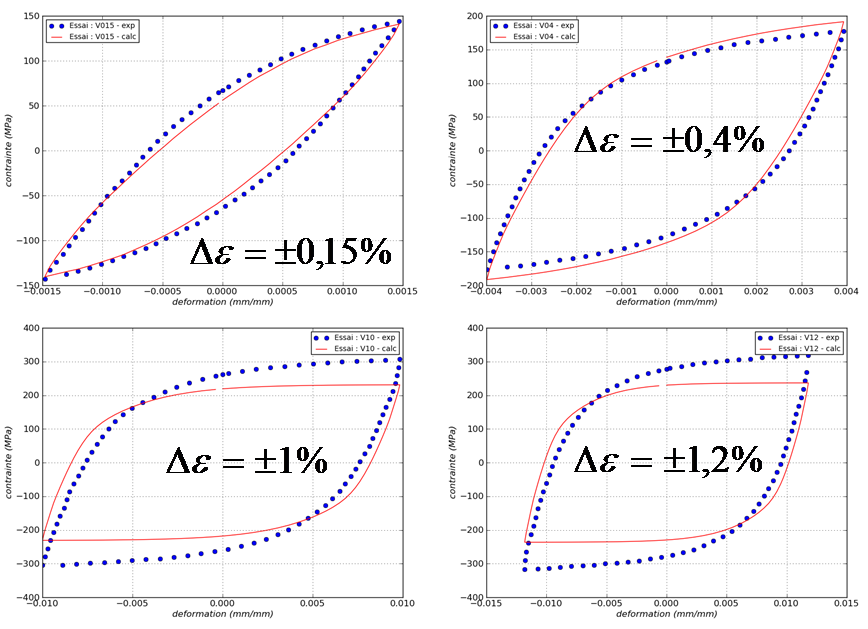
Figure 2-4: Estimation de la robustesse d’une loi de comportement en cas d’extrapolation hors de son domaine de validité.
Pour des simulations anisothermes, plusieurs stratégies sont envisageables.
La plus simple consiste à disposer d’une loi de comportement isotherme pour laquelle on identifie des jeux de paramètres pour plusieurs niveaux de température. Au cours de la simulation, le code de calcul réalisera en chaque point d’intégration une interpolation linéaire en température de chaque paramètre de la loi puis intégrera le comportement sur la base des paramètres interpolés. Cette solution est tout à fait satisfaisante, sous réserve de s’assurer que l’évolution de chaque paramètre en fonction de la température est raisonnablement régulière.
Une alternative plus élégante sur le plan thermodynamique consiste à intégrer les effets de la température directement dans la formulation de la loi de comportement. Cette approche peut s’avérer un peu plus complexe, mais elle permet notamment de proposer une interpolation plus fine (et pas nécessairement linéaire) du comportement entre les données expérimentales disponibles à température constante.
De façon générale, il est important lors d’une simulation anisotherme de s’assurer que la plage de température couverte ne comporte pas de changement de mécanisme de déformation pour le matériau considéré (ou de changement de phase). Si cela s’avère être le cas, le changement de mécanisme devra être pris en compte dans le modèle de comportement retenu.
D’autres paramètres peuvent influencer le comportement mécanique d’un matériau, tels que la teneur en eau (pour certains polymères ou pour les bétons) ou l’irradiation dont l’effet sur le comportement à très forte dose conduit à du gonflement, une activation du fluage et un durcissement de l’acier. L’influence de ces paramètres est généralement intégrée directement à la formulation de lois de comportement spécifiques.
Bibliographie#
CURTIT F. : «Bilan des lois de comportement matériau utilisées dans les études de R&D et d’ingenierie portant sur les principaux composants du parc EDF » H-T24-2012-03041-FR
Jean LEMAITRE et Jean-Louis CHABOCHE; «Mécanique des matériaux solides»; Éditions DUNOD
Dominique FRANCOIS, André PINEAU et André ZAOUI; «Comportement mécanique des matériaux»; Édition HERMES
[U2.04.03] «Choix du comportement élasto-(visco)-plastique»
Historique des versions du document#
Version Aster |
Auteur(s) ou contributeur(s), organisme |
Description des modifications |
11.3 |
|
Version initiale issue du document H-T24-2012-03041-FR |