v5.01.102 SDND102 - Réponse sismique d’un système masse-ressort non linéaire multi-supporté#
Résumé
Le problème consiste à analyser la réponse d’une structure mécanique, modélisée par deux systèmes masse‑ressort non amortis, soumis à un chargement sismique de type harmonique, avec possibilité de choc.
On teste l’élément discret en traction-compression, le calcul des modes propres et des modes statiques, le calcul de la réponse transitoire par recombinaison modale non linéaire d’une structure soumise à un accélérogramme (modélisation A) ainsi que le calcul de la réponse sismique transitoire directe d’une structure non linéaire (modélisation B).
Ce cas test sert aussi à valider un calcul avec résolution explicite sur les accélérations et choc (modélisations C et D) en comparant les résultats respectivement issus de DYNA_NON_LINE avec un schéma de temps implicite, puis explicite non dissipatif des différences centrées et, enfin, explicite dissipatif de TCHAMWA.
Les modélisations A, B, C, D utilisent le comportement DIS_CHOC.
Les modélisations E et F sont respectivement les mêmes que les C et D, avec le comportement DIS_CONTACT.
Les modélisation G et H teste le comportement CHOC_ENDO_PENA. Les données matériau (notamment raideurs et masses) sont celles du test sdnd109 et diffèrent donc des autres modélisations. Le signal quant à lui a été modifié pour introduire une augmentation de l’amplitude au cours du temps.
Les résultats obtenus sont en très bon accord avec les résultats de référence.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Il s’agit de comparer la réponse d’un système symétrique constitué par deux systèmes masse-ressort identiques à la réponse d’un système masse-ressort. Les deux problèmes, exposés en détail dans la référence [bib2], sont sollicités par le même accélérogramme.
On calcule dans un premier temps les fréquences propres \({f}_{i}\) , les vecteurs propres associés normalisés par rapport à la masse modale \({\Phi}_{\text{Ni}}\) et les modes statiques \(\Psi\) du système (valeurs analytiques). On calcule ensuite la réponse généralisée du système multi-supporté en résolvant analytiquement l’intégrale de Duhamel [bib1]. Enfin, on restitue sur la base physique le déplacement relatif des nœuds de choc ce qui nous permet, après avoir calculé le champ des déplacements d’entraînement, de calculer le champ des déplacements absolus.
On calcule la fonction \(\mathit{diff}\) définie comme étant la différence entre le déplacement absolu du nœud choquant sur un obstacle mobile et celui du nœud choquant sur un obstacle fixe. On vérifie qu’elle est bien nulle pour différents instants.
Pour la modélisation G, seul le problème 2 est modélisé. Il n’y a pas de solutions de référence autres que les données matériau (critère et raideur de décharge).
Résultats de référence#
Déplacements relatifs et absolus aux nœuds de choc.
Incertitude sur la solution#
Comparaison entre deux modélisations équivalentes.
Références bibliographiques#
J.S. PRZEMIENIECKI: Theory of matrix structural analysis New York, MacGraw - Hill, 1968, p. 351-357.
Fe. WAECKEL: Utilisation et validation des développements réalisés pour calculer la réponse sismique de structures multi-supportées – HP52/96.002.
Modélisation A#
Caractéristiques de la modélisation#
Les systèmes masse-ressort sont modélisés par des éléments discrets à 3 degrés de liberté DIS_T.
Modélisation du problème 1:

Figure 3.1-a :Modélisation d’un système masse-ressort impactant une paroi rigide
Le nœud \(\mathrm{no1}\) est soumis à une accélération imposée \({\gamma}_{1}(t)\) . On calcule le déplacement relatif du nœud \(\mathrm{no2}\) , son déplacement d’entraînement et son déplacement absolu.
Un obstacle de type PLAN_Z (deux plans parallèles) est retenu pour simuler l’impact du système masse-ressort sur une paroi rigide. La normale au plan de choc est l’axe \(Z\) , NORM_OBST: (0. 0. 1.). Pour ne pas être gêné par le rebond de l’oscillateur sur le plan symétrique, on repousse celui-ci très loin (cf. figure).
D’où:
l’origine de l’obstacle ORIG_OBST: (–1. 0. 0.);
et le jeu correspondant jeu: 1.1005
Modélisation du problème 2:
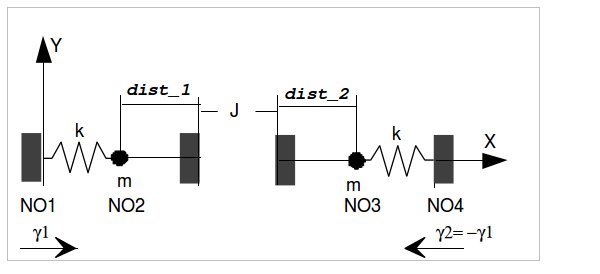
Figure 3.1-b : Modélisation de deux systèmes masse-ressort qui s’entrechoquent
Le nœud \(\mathrm{NO1}\) est soumis à une accélération imposée \({\gamma}_{1}(t)\) , le nœud \(\mathrm{NO4}\) à \({\gamma}_{2}(t)=–{\gamma}_{1}(t)\) . On calcule le déplacement relatif des nœuds \(\mathrm{NO2}\) et \(\mathrm{NO3}\) , leur déplacement d’entraînement et leur déplacement absolu.
Les conditions de choc entre les deux systèmes masse-ressort sont simulées par un obstacle de type BI_PLAN_Z (obstacle plan entre deux structures mobiles). La normale au plan de choc est choisie selon l’axe \(Z\) , soit NORM_OBST= (0. 0. 1.).
Les épaisseurs de matière entourant les nœuds de choc dans la direction considérée sont précisées par les opérandes DIST_1 et DIST_2. Dans le cas traité, on choisit DIST_1=DIST_2= 0.4495pour qu’à l’instant initial, les deux nœuds de choc soient séparés du jeu \(J=2j={10}^{-3}\mathrm{mm}\) (cf. figure).
L’intégration temporelle est réalisée avec l’algorithme d’Euler et un pas de temps de \(2,5.{10}^{-\mathrm{4s}}\) . Les calculs sont archivés tous les 8 pas de temps.
On considère un amortissement réduit \(\xi\) de 7% pour l’ensemble des modes calculés.
Caractéristiques du maillage#
On appelle modele le maillage associé au problème composé d’un système masse-ressort butant contre une paroi fixe et bichoc celui qui est associé au problème 2.
Maillage associé au modèle modele:
nombre de nœuds: 2;
nombre de mailles et types: 1 DIS_T.
Maillage associé au modèle bichoc:
nombre de nœuds: 4;
nombre de mailles et types: 2 DIS_T.
Résultats de la modélisation A#
Valeurs testées de la modélisation A#
On calcule la fonction \(\mathit{diff}\) définie comme étant la différence entre le déplacement absolu du nœud \(\mathrm{NO2}\) et celui du nœud \(\mathit{no2}\) . Et on vérifie qu’elle est bien nulle pour différents instants.
Temps (s) |
Référence |
0,1 |
0,0 |
0,3 |
0,0 |
0,5 |
0,0 |
0,7 |
0,0 |
1 |
0,0 |
On teste également la valeur du déplacement absolu du nœud \(\mathit{NO2}\) pour différents instants.
Temps (s) |
Référence (problème 2) |
0,05 |
–3,58082E-04 |
0,156 |
–1,22321E-04 |
0,25 |
–1,8876E-04 |
0,4 |
–1,89772E-04 |
0,5 |
–6,84454E-05 |
0,8 |
–1,11982E-04 |
0,9 |
–1,20103E-04 |
1 |
–1,07178E-04 |
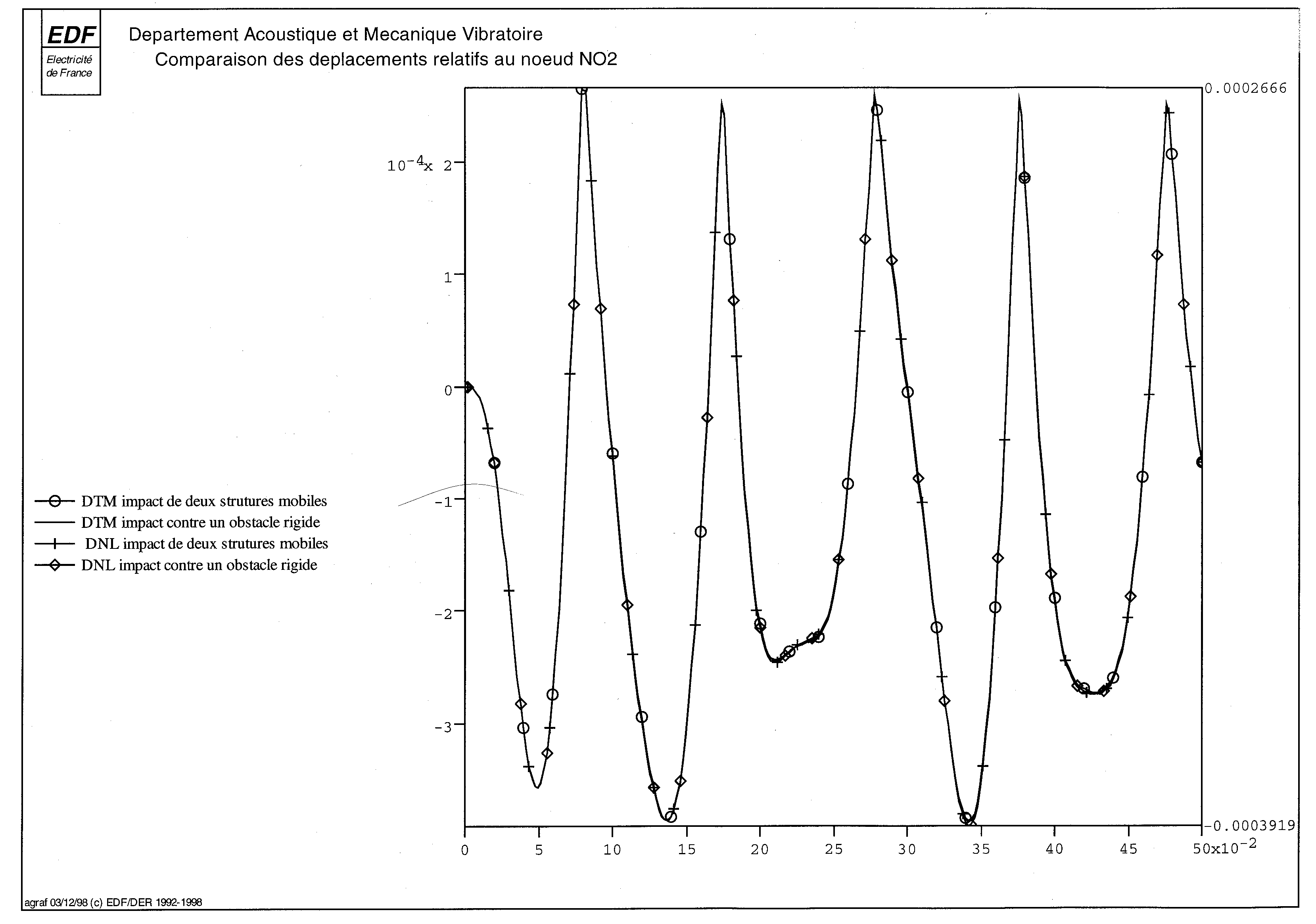
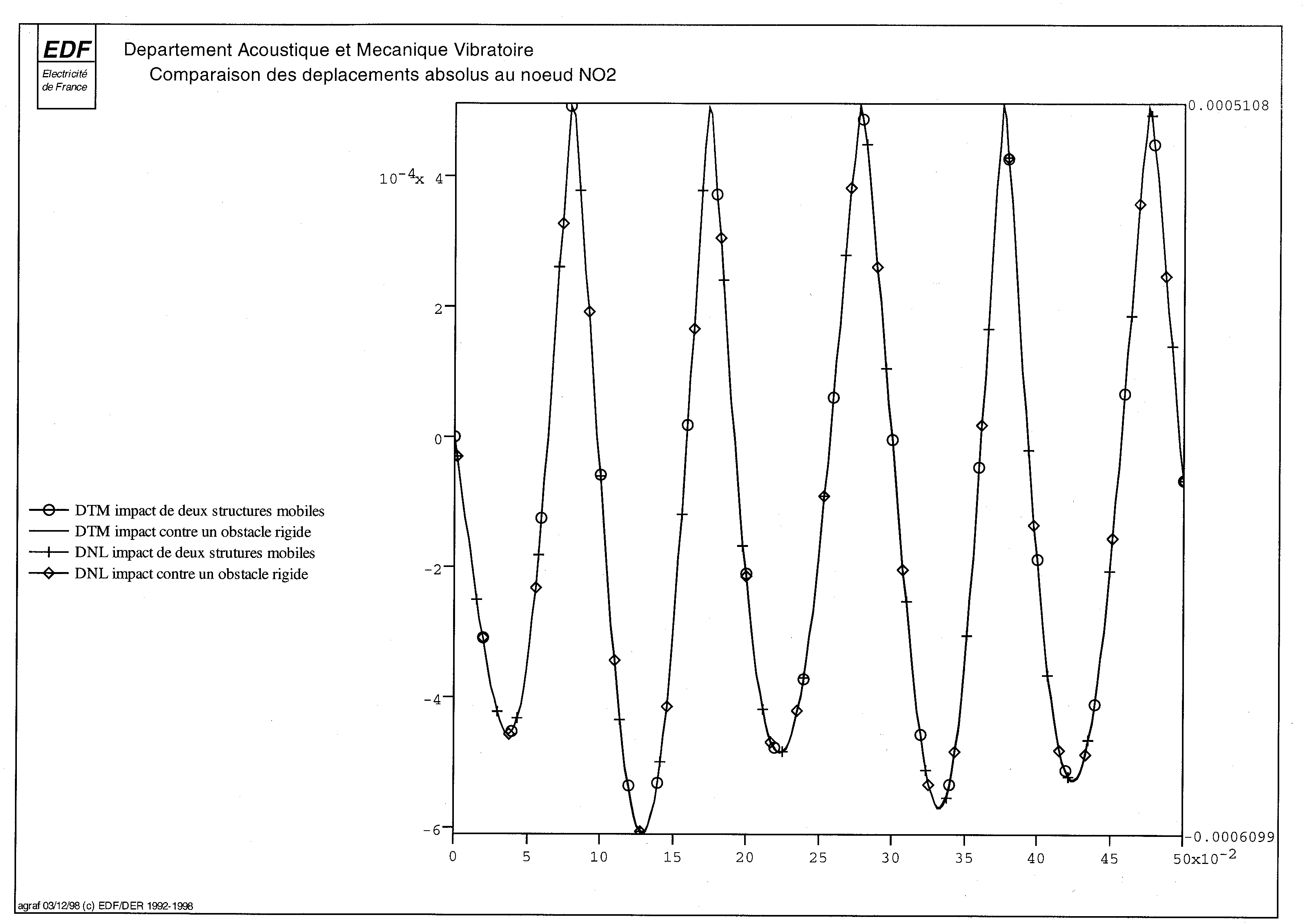
On représente ci dessous l’allure des déplacements relatifs et absolus au nœud \(\mathrm{NO2}\) :
|
|
Déplacements absolus |
Déplacements relatifs |
Modélisation B#
Caractéristiques de la modélisation#
Les systèmes masse-ressort sont modélisés, comme dans la modélisation A, par un élément discret à 3 degrés de liberté DIS_T.
Modélisation du problème 1:

Figure 5.1-a : Modélisation d’un système masse-ressort impactant une paroi rigide
Le nœud \(\mathrm{NO1}\) est soumis à une accélération imposée \({\gamma}_{1}(t)\) . On calcule le déplacement relatif du nœud \(\mathrm{NO2}\) , son déplacement d’entraînement et son déplacement absolu.
Un élément de type DIST_T sur une maille POI1 est retenu pour simuler l’impact de la poutre sur une paroi rigide: les éventuels chocs entre la poutre et l’obstacle sont pris en compte comme étant des forces internes à cet élément. On lui affecte un comportement non linéaire de type choc (raideur) via la loi de comportement DIS_CONTACT de la commande DEFI_MATERIAU.
L’épaisseur de matière entourant le nœud de choc dans la direction considérée est précisée par l’opérande DIST_1 de la commande DEFI_MATERIAU. Dans le cas traité, on choisit DIST_1 \(=0.4495\) et JEU \(=0.45\) pour qu’à l’instant initial, le nœud de choc et l’obstacle soient séparés du jeu \(j=5.{10}^{-4}\mathrm{mm}\) (cf. figure).
Le chargement sismique, dû aux déplacements imposés du nœud \(\mathrm{NO1}\) , est calculé par l’opérateur CALC_CHAR_SEISME. On crée ensuite un concept charge à partir de l’opérande VECT_ASSE de la commande AFFE_CHAR_MECA.
On utilise le schéma d’intégration implicite de NEWMARK de DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’DEPLACEMENT’)avec un pas de temps de \({10}^{-3}s\) et les paramètres par défaut.
Modélisation du problème 2:
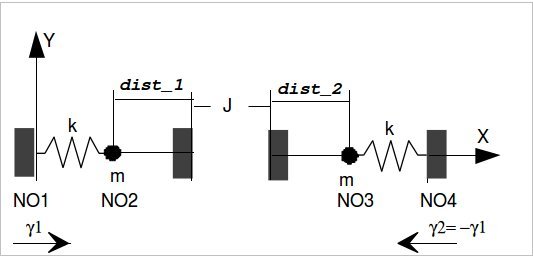
Figure 5.1-b : Modélisation de deux systèmes masse-ressort qui s’entrechoquent
Le nœud \(\mathrm{NO1}\) est soumis à une accélération imposée \({\gamma}_{1}(t)\) , le nœud \(\mathrm{NO4}\) à \({\gamma}_{2}(t)=–{\gamma}_{1}(t)\) . On calcule les déplacements relatif et absolus des nœuds \(\mathrm{NO2}\) et \(\mathrm{NO3}\) , leur déplacement d’entraînement et leur déplacement absolu.
Les éventuels chocs entre les deux poutres sont pris en compte comme étant des forces internes à un élément à deux nœuds. On affecte à cet élément un comportement non linéaire de type choc (raideur) via le mot clé RIGI_NOR de la loi de comportement DIS_CONTACT de la commande DEFI_MATERIAU. La direction normale de contact est l’axe local \(x\) de l’élément discret à deux nœuds.
Les épaisseurs de matière entourant les nœuds de choc dans la direction considérée sont précisées par les opérandes DIST_1 et DIST_2 de la commande DEFI_MATERIAU. Dans le cas traité, on choisit DIST_1=DIST_2 \(=0.4495\) pour qu’à l’instant initial, les deux nœuds de choc soient séparés du jeu \(J=2.j={10}^{-3}m\) (cf. figure).
Le chargement sismique, dû aux déplacements imposés des ancrages (nœud \(\mathrm{NO1}\) et \(\mathrm{NO4}\) , est calculé par l’opérateur CALC_CHAR_SEISME. On crée un concept charge à partir de l’opérande VECT_ASSE de la commande AFFE_CHAR_MECA.
L’intégration temporelle est réalisée avec l’algorithme de Newmark et un pas de temps de \({10}^{-3}s\) . Les calculs sont archivés tous les 8 pas de temps.
On considère un amortissement réduit \(\xi\) de 7% pour l’ensemble des modes calculés (mot-clé AMOR_MODAL de l’opérateur DYNA_NON_LINE).
Caractéristiques du maillage#
Le maillage associé au modèle bichoc est constitué de 4 nœuds et de 3 mailles de type DIS_T.
Résultats de la modélisation B#
Valeurs testées de la modélisation B#
On calcule la fonction \(\mathit{diff}\) définie comme étant la différence entre le déplacement absolu du nœud \(\mathrm{NO2}\) et celui du nœud \(\mathrm{no2}\) . Et on vérifie qu’elle est bien nulle pour différents instants.
Temps (s) |
Référence |
0,1 |
0,0 |
0,2 |
0,0 |
0,3 |
0,0 |
0,4 |
0,0 |
0,5 |
0,0 |
On teste également la valeur maximale de la force d’impact au nœud \(\mathrm{NO2}\) .
Type d’impact |
Référence |
contre une paroi rigide |
6,29287E+02 |
entre deux structures mobiles |
6,29287E+02 |
On teste également les valeurs des champs absolus au nœud \(\mathit{NO2}\) et à l’instant \(t=0.01\) .
Champ |
Référence |
Type |
Tolérance |
DEPL_ABSOLU |
-1.488877E-004 |
NON_REGRESSION |
1,00E-010 |
VITE_ABSOLU |
-1.287591E-002 |
NON_REGRESSION |
1,00E-010 |
ACCE_ABSOLU |
5.877853E-001 |
NON_REGRESSION |
1,00E-010 |
On teste également la fonctionnalité OBSERVATION . L es champs absolus au nœud \(\mathit{NO2}\) et à l’instant \(t=0.01\) doivent être identiques aux champs précédents:
Champ |
Référence |
Type |
Tolérance |
DEPL_ABSOLU |
-1.488877E-004 |
NON_REGRESSION |
1,00E-010 |
VITE_ABSOLU |
-1.287591E-002 |
NON_REGRESSION |
1,00E-010 |
ACCE_ABSOLU |
5.877853E-001 |
NON_REGRESSION |
1,00E-010 |
On teste enfin l’option SUIVI_DDL en comparant visuellement les valeurs obtenues à celles extraites de la table d’OBSERVATION générée. Ces vérifications portent sur le déplacement et la vitesse (champs DEPL et VITE) au nœud \(\mathit{NO2}\) à l’instant \(t=0.1\) . On teste aussi l’option MIN de SUIVI_DDL sur le groupe de mailles RESSORT1 au même instant. Cet instant a été choisi de manière à ce que la valeur minimale des champs de déplacement et de vitesse sur ce groupe de maille soit obtenue au nœud \(\mathit{NO2}\) .
Pour le déplacement on retrouve donc la valeur: \(-3.99791E-05m\) et pour la vitesse la valeur: \(-1.51040E-02m/s\) .
Modélisations C, E#
Caractéristiques des modélisations#
Les modélisationssont avant tout un test de DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’ACCELERATION’), dont les résultats sont comparés avec DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’DEPLACEMENT’).
Les systèmes masse-ressort sont modélisés, comme dans la modélisation A, par un élément discret à 3 degrés de liberté DIS_T. Seule la modélisation à un degré de liberté est testée.
Modélisation du problème:
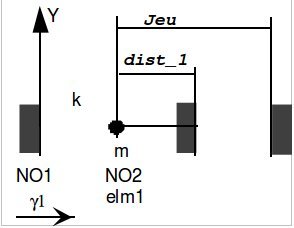
Figure 7.1-a : Modélisation d’un système masse-ressort impactant une paroi rigide
Le nœud \(\mathrm{NO1}\) est soumis à une accélération imposée \({\gamma}_{1}(t)\) . On calcule le déplacement relatif du nœud \(\mathrm{NO2}\) , son déplacement d’entraînement et son déplacement absolu.
Un élément de type DIST_T sur une maille POI1 est retenu pour simuler l’impact de la poutre sur une paroi rigide: les éventuels chocs entre la poutre et l’obstacle sont pris en compte comme étant des forces internes à cet élément. On lui affecte un comportement non linéaire de type choc (DIS_CHOC pour la modélisation C et DIS_CONTACT pour la modélisation E) via la définition des caractéristiques DIS_CONTACT de la commande DEFI_MATERIAU.
L’épaisseur de matière entourant le nœud de choc dans la direction considérée est précisée par l’opérande DIST_1 de la commande DEFI_MATERIAU. Dans le cas traité, on choisit DIST_1 \(=0.4495\) et JEU \(=0.45\) pour qu’à l’instant initial, le nœud de choc et l’obstacle soient séparés du jeu \(j=5.{10}^{-4}\mathrm{mm}\) (cf. figure).
Le chargement sismique, dû aux déplacements imposés du nœud \(\mathrm{NO1}\) , est calculé par l’opérateur CALC_CHAR_SEISME. On crée ensuite un concept charge à partir de l’opérande VECT_ASSE de la commande AFFE_CHAR_MECA.
On utilise le schéma d’intégration de NEWMARK explicite de type DIFFERENCES CENTREES avec un pas de temps de \({10}^{-3}s\) . Le calcul par DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’ACCELERATION’) est effectué dans l’espace modal, la non-linéarité étant due au choc et donc demeurant locale.
Caractéristiques du maillage#
Le maillage associé au modèle est constitué de 2 nœuds, d’une maille SEG2 de type DIS_T et d’une maille ponctuelle POI1 de type DIS_T.
Résultats des modélisations C, E#
Valeurs testées des modélisation C, E#
Le calcul est non-linéaire à cause du choc et on ne dispose pas de solution analytique. On teste donc le calcul sur des valeurs de non-régression sur le déplacement selon \(x\) du nœud \(\mathrm{NO2}\) .
Temps (s) |
Référence |
0,1 |
–15,6520E-3 |
0,2 |
–51,4832E-3 |
0,3 |
28,1291E-3 |
0,4 |
–44,9343E-3 |
0,5 |
–37,7508E-3 |
On compare les déplacements absolus issus de DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’ACCELERATION’) avec ceux donnés par DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’DEPLACEMENT’).

Figure 8.1-a : Comparaison de DYNA_TRAN_EXPLI et DYNA_NON_LINE.
Modélisations D, F#
Caractéristiques de la modélisation#
Les modélisations D et F sont des variantes de la modélisation C et E où l’on va remplacer le schéma en temps non dissipatif des différences centrées par le schéma explicite dissipatif de TCHAMWA (avec le paramètre PHI = 1.05). A la différence des modélisations C et E, on résout ici sur base physique et non sur base modale (le mot-clé PROJ_MODAL de DYNA_NON_LINEn’est donc plus présent dans les modélisations D et F).
Résultats des modélisations D, F#
Valeurs testées des modélisations D, F#
Le calcul est non-linéaire à cause du choc et on ne dispose pas de solution analytique. Comparées à la modélisation C les valeurs obtenues sont différentes car le schéma en temps introduit une dissipation numérique. On teste le calcul sur des valeurs de non-régression sur le déplacement selon \(x\) du nœud \(\mathit{NO}2\) .
Temps (s) |
Référence |
Tolérance |
0,1 |
–15,6911E-3 |
0.10% |
0,2 |
–49,4505E-3 |
0.10% |
0,3 |
30,2638E-3 |
0.10% |
0,4 |
–38,0509E-3 |
0.10% |
0,5 |
–39,2295E-3 |
0.10% |
Le fait de changer de schéma en temps et d’introduire une dissipation supplémentaire, modifie certaines des valeurs instantanées testées de l’ordre de 10 %.

Modélisation G#
Caractéristiques de la modélisation G#
La modélisation Gest une copie du problème 2 de la modélisation B qui teste le comportement CHOC_ENDO_PENA.
Résultats de la modélisation G#
Valeurs testées de la modélisation G#
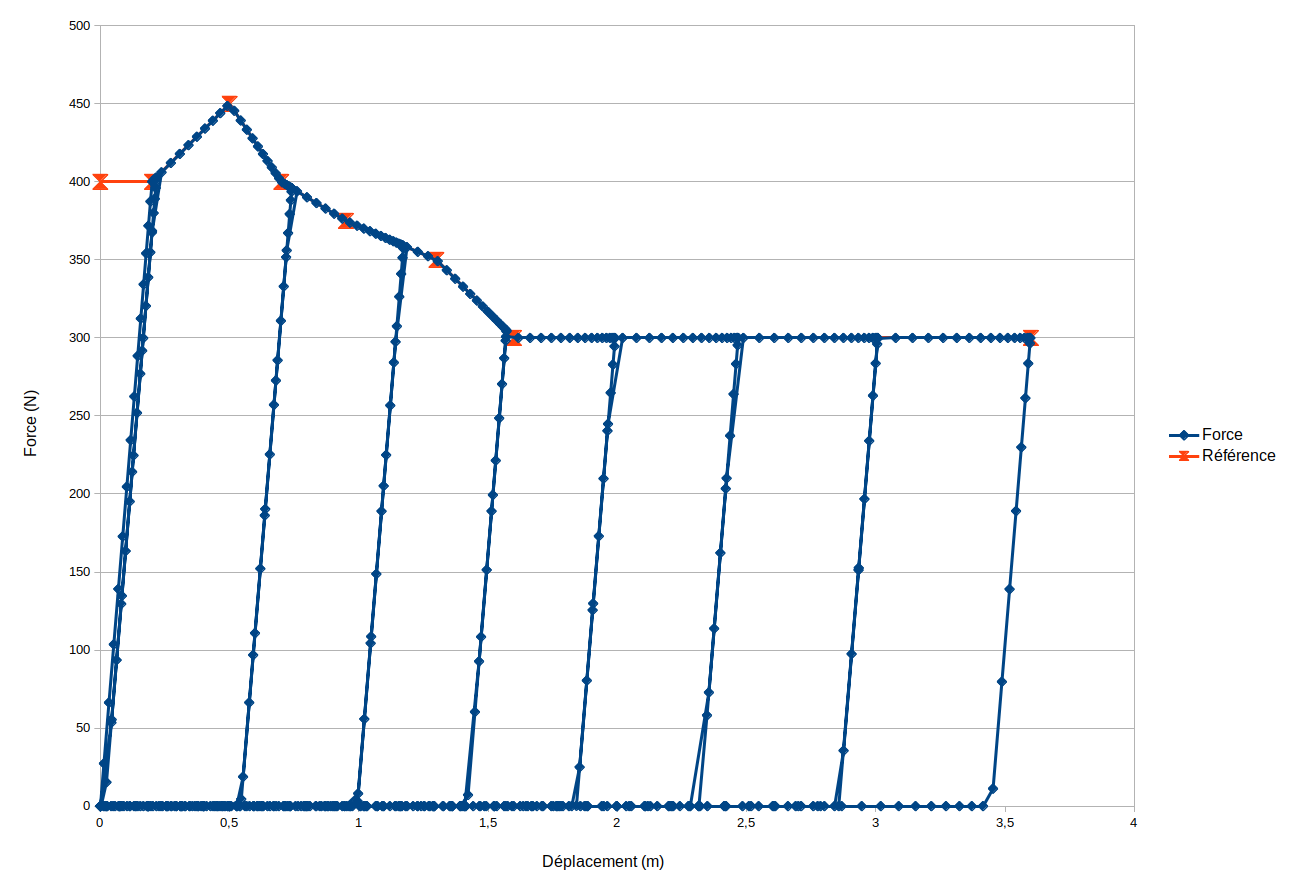
On teste en non-régression les déplacements des nœuds N02 et N03 et les variables internes V1 et V2 de l’élément discret N02-N03 à chaque maximum de la valeur de l’effort. On teste aux mêmes instants avec une référence analytique par rapport au critère (donnée matériau) l’effort dans ce même élément discret.
Temps (s) |
Identification |
Type de référence |
Référence |
Tolérance |
2,715E-1 |
Déplacement N02 |
NON_REGRESSION |
||
Déplacement N03 |
NON_REGRESSION |
|||
Effort |
ANALYTIQUE |
-449.58262915649607 |
1E-3 |
|
V1 |
NON_REGRESSION |
|||
V2 |
NON_REGRESSION |
|||
1,895E-1 |
Déplacement N02 |
NON_REGRESSION |
||
Déplacement N03 |
NON_REGRESSION |
|||
Effort |
ANALYTIQUE |
-400.1156325363858 |
1E-3 |
|
V1 |
NON_REGRESSION |
|||
V2 |
NON_REGRESSION |
|||
2,985E-1 |
Déplacement N02 |
NON_REGRESSION |
||
Déplacement N03 |
NON_REGRESSION |
|||
Effort |
ANALYTIQUE |
-375.85067189738197 |
1E-3 |
|
V1 |
NON_REGRESSION |
|||
V2 |
NON_REGRESSION |
La figure ci-dessous réprésente la courbe force/déplacement de l‘élément discret. On constate que l‘on suit bien le critère aux courbes des charges et décharges avec augmentation de l‘amplitude du chargement.
Modélisation H#
Caractéristiques de la modélisation H#
La modélisation H est une adaptation du problème 1 de la modélisation A qui teste le comportement CHOC_ENDO_PENA sous le seuil d’effort critique, afin de vérifier dans ce cas une équivalence des résultats avec un discret de choc élastique (DIS_CHOC).
Résultats de la modélisation H#
Valeurs testées de la modélisation H#
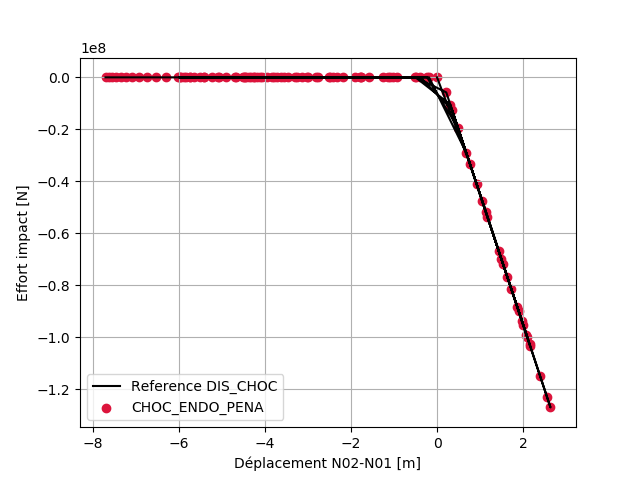
On teste en non-régression les déplacements absolus des noeuds N01 et N02, extrémités du discret d’impact GAC, ainsi que l’effort normal aux instants de choc dans ce même élément discret. Les valeurs de référence sont issus du même calcul avec le comportement DIS_CHOC.
La figure ci-dessous montre la comparaison de la courbe force/déplacement de l‘élément discret entre les comportements DIS_CHOC et CHOC_ENDO_PENA. On constate que sous l’effort de seuil le comportement CHOC_ENDO_PENA est équivalent au comportement DIS_CHOC.
Synthèse des résultats#
Les résultats obtenus avec Code_Aster sont conformes à ceux attendus (erreur inférieure au millième).
Sur cet exemple, le calcul non linéaire direct est beaucoup plus coûteux en temps de calcul, d’un facteur 20, que celui sur base modale.
Les modélisations C et E montrent que l’on obtient bien des résultats semblables avec une méthode d’intégration temporelle explicite avec mot-clé SCHEMA_TEMPS (FORMULATION=’ACCELERATION’)) et implicite (DYNA_NON_LINE avec mot-clé SCHEMA_TEMPS (FORMULATION=’ACCELERATION’)).
Les modélisations D et Fmontrent que l’on obtient aussi des résultats proches avec une méthode d’intégration temporelle explicite dissipative de TCHAMWA (l’écart étant dû à cet amortissement numérique ajouté).