r3.08.04 Élément de poutre à 7 degrés de liberté pour la prise en compte du gauchissement#
Résumé:
Ce document présente l’élément POU_D_TG qui est un élément fini de poutre droite avec prise en compte du gauchissement des sections. Il permet le calcul des poutres à sections transverses minces et profil ouvert, avec torsion gênée ou libre.
En ce qui concerne la flexion, les efforts normaux et tranchants, cet élément est basé sur l’élément POU_D_T, qui est un élément de poutre droite avec cisaillement transverse (modèle de Timoshenko).
Pour l’élément POU_D_TG, la section est supposée constante (de forme quelconque) et le matériau est homogène et isotrope, de comportement élastique linéaire.
L’élément POU_D_TGM est à utiliser pour les comportements non-linéaires.
Cette documentation de référence s’appuie sur la documentation de référence générale des poutres, en élasticité linéaire [R3.08.01]. Elle décrit les spécificités de l’élément de poutre droite avec gauchissement POU_D_TG.
Notations#
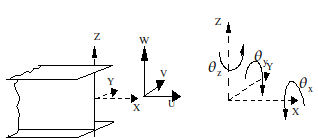
Les notations utilisées ici correspondent à celles utilisées dans [R3.08.01] et [R3.08.03]. On donne ici la correspondance entre cette notation et celle de la documentation d’utilisation. \(\mathrm{DX},\mathrm{DY},\mathrm{DZ},\mathrm{DRX},\mathrm{DRY},\mathrm{DRZ}\mathrm{et}\mathrm{GRX}\) sont les noms des degrés de liberté associés aux composantes du déplacement \(u,v,w,{\theta}_{x},{\theta}_{y},{\theta}_{z},{\theta}_{x,x}\) . Ils sont exprimés en repère global, sauf le degré de liberté associé au gauchissement \(\mathrm{GRX}\) , qui s’exprime en repère local.
Notation utilisée |
Signification |
Notation de la documentation d’utilisation |
\(S\) |
aire de la section |
\(A\) |
\({I}_{y},{I}_{z}\) |
moments géométriques de flexion par rapport aux axes \(x\) et \(y\) . |
\(\mathrm{IY},\mathrm{IZ}\) |
\(C\) |
constante de torsion |
\(\mathrm{JX}\) |
\({I}_{\omega}\) |
constante de gauchissement |
\(\mathrm{JG}\) |
\({k}_{y},{k}_{z}\) |
coefficients de cisaillement |
\(\frac{1}{\text{AY}}\frac{1}{\text{AZ}}\) |
\({e}_{y},{e}_{z}\) |
excentrement du centre de torsion/cisaillement par rapport au centre de gravité de la section droite |
\(\text{EY},\text{EZ}\) |
\(N\) |
effort normal à la section |
\(N\) |
\({V}_{y},{V}_{z}\) |
efforts tranchants suivant les axes \(y\) et \(z\) |
\(\text{VY},\text{VZ}\) |
\({M}_{x},{M}_{y},{M}_{z}\) |
moments autour des axes \(x\) , \(y\) et \(z\) |
\(\text{MT},\text{MFY},\text{MFZ}\) |
\({M}_{\omega}\) |
bi-moment |
\(\text{BX}\) |
\(u,v,w\) |
translations sur les axes \(x\) , \(y\) et \(z\) |
\(\text{DX}\text{DY}\text{DZ}\) |
\({\theta}_{x},{\theta}_{y},{\theta}_{z}\) |
rotations autour des axes \(x\) , \(y\) et \(z\) |
\(\text{DRX}\text{DRY}\text{DRZ}\) |
\({\theta}_{x,x}\) |
dérivée de la rotation de torsion selon \(x\) |
\(\text{GRX}\) |
\(E\) |
module d’Young |
\(E\) |
\(\nu\) |
coefficient de Poisson |
\(\text{NU}\) |
\(G=\frac{E}{2(1+\nu )}=\mu\) |
module de Coulomb (identique au coefficient de Lamé) |
\(G\) |
Cinématique spécifique à la torsion avec gauchissement#
La cinématique utilisée pour représenter le déplacement des sections de poutre est identique à celle des poutres droites de Timoshenko [R3.08.01] en ce qui concerne la traction - compression, et la flexion-cisaillement. On ne détaille ici que la torsion.
Deux possibilités sont à envisager pour la modélisation du comportement en torsion des sections non circulaires[bib], qui produit toujours un gauchissement de la section droite.
La torsion est libre (torsion de Saint-Venant): le gauchissement des sections droites est non nul (il peut même être important pour une section mince ouverte), mais il est indépendant de la position sur l’axe \(x\) de la poutre, (constant en fonction de \(x\) ) et il n’y a pas de contrainte axiale due à la torsion.
La torsion est gênée (Vlassov): le gauchissement est non nul, et de plus des contraintes axiales non uniformes (dont l’effort résultant est appelé bi-moment) existent dans la poutre.
L’élément POU_D_TG permet de traiter ces deux configurations: la torsion peut être libre ou gênée. L’utilisateur aura accès au gauchissement dans les deux cas, par contre le bi-moment ne sera non nul que dans le cas de la torsion gênée. À noter qu’à l’endroit du raccordement des poutres, la transmission du gauchissement dépend du type de liaison. En général, la torsion dans un assemblage de poutres est gênée. Le gauchissement peut alors être bloqué aux points de raccordement.
Remarque:
Avec des éléments sans modélisation du gauchissement (POU_D_T, POU_D_E), on peut traiter le cas de la torsion libre (les déplacements autres que le gauchissement seront corrects), mais pas le cas de la torsion gênée.
On peut découpler les effets de torsion et de flexion dans un repère local (translaté du repère principal d’inertie) ayant pour origine le centre de torsion. Le centre de torsion est le point qui reste fixe lorsque la section est soumise au seul moment de torsion. Il est aussi appelé centre de cisaillement car un effort appliqué en ce point ne produit pas de rotation autour de \(x\) .
Les déplacements dans le plan de la section seront donc exprimés dans ce repère. Les déplacements axiaux restent exprimés dans le repère principal d’inertie lié au centre de gravité \(G\) , pour garder un découplage des déplacements de flexion et de traction - compression.
Le déplacement d’un point quelconque de la section droite s’écrit alors sous forme générale (torsion libre ou gênée):
\(\begin{array}{}\left\lbrace \begin{array}{c}u(x,y,z)\\ v(x,y,z)\\ w(x,y,z)\end{array}\right\rbrace =\left\lbrace \begin{array}{c}{u}_{G}(x)\\ 0\\ 0\end{array}\right\rbrace +\left\lbrace \begin{array}{c}z{\theta}_{y}(x)\\ 0\\ w(x)\end{array}\right\rbrace +\left\lbrace \begin{array}{c}-y{\theta}_{z}(x)\\ v(x)\\ 0\end{array}\right\rbrace +\left\lbrace \begin{array}{c}\omega (y,z){\theta}_{x,x}(x)\\ -(z-{z}_{c}){\theta}_{x}(x)\\ (y-{y}_{c}){\theta}_{x}(x)\end{array}\right\rbrace \end{array}\)
Déplacement = membrane + flexion/ \(y\) + flexion/ \(z\) + torsion avec gauchissement
Les composantes sont exprimées dans le repère principal d’inertie (centré en \(G\) ): \(x\) est dirigé suivant l’axe de la poutre, \(y\) et \(z\) sont les deux autres axes principaux d’inertie.
Le terme \(\omega (y,z){\theta}_{x,x}(x)\) représente le déplacement axial dû au gauchissement de la section droite. \(\omega (y,z)\) est la fonction de gauchissement (exprimée en \({m}^{2}\) , mais qui n’a pas d’interprétation physique évidente).
Les déformations d’un point quelconque de la section sont alors:
\(\begin{array}{}\left\lbrace \begin{array}{c}{\varepsilon}_{xx}(x,y,z)\\ 2{\varepsilon}_{xy}(x,y,z)\\ 2{\varepsilon}_{xz}(x,y,z)\end{array}\right\rbrace =\left\lbrace \begin{array}{c}{u}_{{G}_{,x}}(x)\\ 0\\ 0\end{array}\right\rbrace +\left\lbrace \begin{array}{c}z{\theta}_{y,x}(x)\\ 0\\ {\gamma}_{xz}(x)\end{array}\right\rbrace +\left\lbrace \begin{array}{c}-y{\theta}_{z,x}(x)\\ {\gamma}_{xy}(x)\\ 0\end{array}\right\rbrace +\left\lbrace \begin{array}{c}\omega (y,z){\theta}_{x,xx}(x)\\ ({\omega}_{,y}-(z-{z}_{c})){\theta}_{x,x}(x)\\ ({\omega}_{,z}+(y-{y}_{c})){\theta}_{x,x}(x)\end{array}\right\rbrace \\ {\gamma}_{xy}(x)={v}_{,x}-{\theta}_{z}\\ {\gamma}_{xz}(x)={w}_{,x}+{\theta}_{y}\end{array}\)
\(\text{Déformation}=\text{membrane}+\text{flexion}/y+\text{flexion}/z+\text{torsion avec gauchissement}\)
Le terme \(\omega (y,z){\theta}_{x,xx}(x)\) est nul dans le cas de la torsion libre: on a en effet \({\theta}_{x,xx}(x)=0\) , puisque le gauchissement est indépendant de \(x\) . Il est non négligeable dans le cas de la torsion gênée.
La loi de comportement élastique isotrope s’écrit (en faisant l’hypothèse des contraintes planes dans les directions \(y\) et \(z\) ):
\(\left\lbrace \begin{array}{c}{\sigma}_{xx}(x,y,z)\\ {\sigma}_{xy}(x,y,z)\\ {\sigma}_{xz}(x,y,z)\end{array}\right\rbrace =\left\lbrace \begin{array}{c}E.{\varepsilon}_{xx}(x,y,z)\\ G.2{\varepsilon}_{xy}(x,y,z)\\ G.2{\varepsilon}_{xz}(x,y,z)\end{array}\right\rbrace\)
Les efforts généralisés dans la section s’expriment en fonction des contraintes pour une section homogène par [bib]:
\(N(x)=\underset{S}{\int}{\sigma}_{xx}(x,y,z)\text{ds}\) |
Effort normal |
\({V}_{y}(x)=\underset{S}{\int}{\sigma}_{xy}(x,y,z)\text{ds}\) |
Effort tranchant suivant \(y\) |
\({V}_{z}(x)=\underset{S}{\int}{\sigma}_{xz}(x,y,z)\text{ds}\) |
Effort tranchant suivant \(z\) |
\({M}_{y}(x)=\underset{S}{\int}z.{\sigma}_{xx}(x,y,z)\text{ds}\) |
Moment de flexion autour de \(y\) |
\({M}_{z}(x)=\underset{S}{\int}-y.{\sigma}_{xx}(x,y,z)\text{ds}\) |
Moment de flexion autour de \(z\) |
\({M}_{x}(x)=\underset{S}{\int}((y-{y}_{c}).{\sigma}_{xz}(x,y,z)-(z-{z}_{c}).{\sigma}_{xy}(x,y,z))\text{ds}\) |
Moment de torsion |
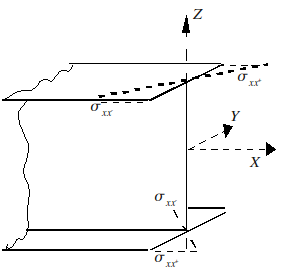
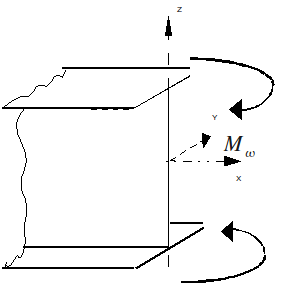
\({M}_{\omega}(x)=\underset{S}{\int}\omega .{\sigma}_{xx}(x,y,z)\text{ds}\) |
Bi-moment (associé au gauchissement) |
\({M}_{\omega}(x)\) représente l’effort généralisé associé au gauchissement. Il s’exprime en \({\mathrm{N.m}}^{2}\) . On peut en donner une illustration comme dans [bib] pour une poutre à section en \(\text{I}\) (le bi-moment agit ici suivant \(z\) uniquement):
Pour un comportement élastique isotrope et homogène dans la section, les efforts généralisés s’expriment donc directement en fonction des déplacements par les relations suivantes:
\(\begin{array}{}N(x)=E.S.{u}_{,x}\\ {V}_{y}(x)={\text{Gk}}_{y}S({v}_{,x}-{\theta}_{z})\\ {V}_{z}(x)={\text{Gk}}_{z}S({w}_{,x}+{\theta}_{y})\\ {M}_{y}(x)=E.{I}_{y}{\theta}_{\text{y,}x}\\ {M}_{z}(x)=E.{I}_{z}{\theta}_{z,x}\\ {M}_{x}(x)=G.J.{\theta}_{\text{x,x}}\\ {M}_{\omega}(x)=E.{I}_{\omega}.{\theta}_{\text{x,xx}}\end{array}\)
où \({k}_{y},{k}_{z}\) sont les coefficients de cisaillement. Le gauchissement n’intervient pas au niveau des efforts tranchants, car ceux-ci sont exprimés dans le repère lié au centre de cisaillement. En effet, la fonction de gauchissement \(\omega\) est telle que:
\(\begin{array}{}\underset{S}{\int}\omega (y,z)\text{ds}=0\\ \underset{S}{\int}y.\omega (y,z)\text{ds}=0\\ \underset{S}{\int}z.\omega (y,z)\text{ds}=0\end{array}\)
Et la constante de gauchissement s’exprime en fonction de \(\omega\) par: \(\underset{S}{\int}{\omega}^{2}(y,z)\text{ds}={I}_{\omega}\)
Élément de poutre droite avec gauchissement : matrices de rigidité et de masse#
Les matrices élémentaires de rigidité et de masse pour l’élément POU_D_TG sont identiques à celles de l’élément de poutre droite de Timoshenko (POU_D_T)en ce qui concerne les termes de traction - compression et de flexion-cisaillement [R3.08.01]. La démarche est identique, on rappelle simplement le résultat.
Ceci implique que, dans le cas de la torsion libre, on conserve les propriétés d’exactitude de la solution aux nœuds pour les degrés de liberté de flexion et de traction - compression.
Par contre, nous allons voir qu’en ce qui concerne la torsion gênée, on effectue une approximation qui ne permet pas de retrouver cette propriété dans le cas général.
Les matrices de rigidité sont toujours calculées avec l’option “RIGI_MECA”, et les matrices de masse avec l’option “MASS_MECA”. Mais l’option “MASS_MECA_DIAG” (matrice de masse diagonalisée) n’a pas été réalisée pour cet élément (cette option est surtout utile pour les problème de dynamique rapide, ce qui n’est pas le domaine d’utilisation préférentiel de cet élément).
Les degrés de liberté de l’élément sont ceux des poutres de Timoshenko, plus un degré de liberté par nœud permettant de calculer les termes relatifs au gauchissement:
En chacun des deux nœuds de l’élément, les degrés de liberté sont:
\(u,v,w\) |
translations sur les axes \(x,y,z\) |
\(\text{DX}\text{DY}\text{DZ}\) |
\({\theta}_{x},{\theta}_{y},{\theta}_{z}\) |
rotations autour des axes \(x,y,z\) |
\(\mathrm{DRX}\mathrm{DRY}\mathrm{DRZ}\) |
\({\theta}_{\text{x,x}}\) |
dérivée de la rotation de torsion suivant \(x\) |
\(\text{GRX}\) |
Les coordonnées locales sont exprimées dans le repère principal d’inertie. L’élément POU_D_TG comporte donc 14 degrés de liberté. L’élément de référence est défini par: \(0<x<L\)
Traction - compression les degré de liberté sont \(u`ou :math:\)mathrm{DX}`#
La matrice de rigidité de l’élément est : \(K=\frac{\text{ES}}{L}\left[\begin{array}{cc}1& -1\\ -1& 1\end{array}\right]\)
La matrice de masse (cohérente) s’écrit : \(M=\frac{\rho \text{SL}}{6}(\begin{array}{cc}2& 1\\ 1& 2\end{array})\)
Flexion dans le plan Gxz, degrés de liberté : w, qy ou Dz, Dry#
La matrice de rigidité s’écrit pour le mouvement de flexion dans le plan principal d’inertie \((\mathrm{Gxz})\) :
\(K=\frac{12{\text{EI}}_{y}}{{L}^{3}(1+{\varphi}_{y})}(\begin{array}{cccc}1& -\frac{L}{2}& -1& -\frac{L}{2}\\ & \frac{(4+{\varphi}_{y}){L}^{2}}{12}& \frac{L}{2}& \frac{(2-{\varphi}_{y}){\text{L}}^{2}}{12}\\ \text{Sym}& & 1& \frac{L}{2}\\ & & & \frac{(4+{\varphi}_{y}){\text{L}}^{2}}{12}\end{array})\)
Le cisaillement transverse est pris en compte par le terme: \({\varphi}_{y}=\frac{12{\text{EI}}_{y}}{{k}_{z}{\text{SGL}}^{2}}\)
Pour la matrice de masse, \(\text{w}(\text{x,}t)\) et \({\theta}_{y}(\text{x,}t)\) sont discrétisés sur la base des fonctions tests introduites pour le calcul de la matrice de rigidité, soit:
\(\begin{array}{}w(x,t)={\xi}_{1}(x){w}_{1}(t)+{\xi}_{2}(x){\theta}_{{y}_{1}}(t)+{\xi}_{3}(x){w}_{2}(t)+{\xi}_{4}(x){\theta}_{{y}_{2}}(t)\\ {\theta}_{y}(x,t)={\xi}_{5}(x){w}_{1}(t)+{\xi}_{6}(x){\theta}_{{y}_{1}}(t)+{\xi}_{7}(x){w}_{2}(t)+{\xi}_{8}(x){\theta}_{{y}_{2}}(t)\end{array}\)
Les fonction d’interpolation utilisées pour les translations (\({\xi}_{1}\) à \({\xi}_{4}\) ) sont des polynômes d’Hermite de degré 3, celle qui sont utilisées pour les rotations (\({\xi}_{5}\) à \({\xi}_{8}\) ) sont de degré 2: pour \(0<x<L\) , elles sont définies par [R3.08.01]:
\(\begin{array}{}\begin{array}{cc}{\xi}_{1}(x)=\frac{1}{1+{\varphi}_{y}}\left[2{(\frac{x}{L})}^{3}-3{(\frac{x}{L})}^{2}-{\varphi}_{y}\frac{x}{L}+(1+{\phi }_{y})\right]& {\xi}_{5}(x)=\frac{6}{L(1+{\varphi}_{y})}\frac{x}{L}\left[1-\frac{x}{L}\right]\\ {\xi}_{2}(x)=\frac{L}{1+{\varphi}_{y}}\left[-{(\frac{x}{L})}^{3}+\frac{4+{\varphi}_{y}}{2}{(\frac{x}{L})}^{2}-\frac{2+{\varphi}_{y}}{2}(\frac{x}{L})\right]& {\xi}_{6}(x)=\frac{1}{1+{\varphi}_{y}}\left[3{(\frac{x}{L})}^{2}-(4+{\varphi}_{y})(\frac{x}{L})+(1+{\varphi}_{y})\right]\end{array}\\ \begin{array}{cc}{\xi}_{3}(x)=\frac{1}{1+{\varphi}_{y}}\text{}\left[-2{(\frac{x}{L})}^{3}+3{(\frac{x}{L})}^{2}+{\varphi}_{y}(\frac{x}{L})\right]& {\xi}_{7}(x)=\frac{-6}{L(1+{\varphi}_{y})}\frac{x}{L}\left[1-\frac{x}{L}\right]\\ {\xi}_{4}(x)=\frac{L}{1+{\varphi}_{y}}\left[-{(\frac{x}{L})}^{3}+\frac{2-{\varphi}_{y}}{2}{(\frac{x}{L})}^{2}+\frac{{\varphi}_{y}}{2}(\frac{x}{L})\right]& {\xi}_{8}(x)=\frac{1}{1+{\varphi}_{y}}\text{}\left[3{(\frac{x}{L})}^{2}+(-2+{\varphi}_{y})(\frac{x}{L})\right]\end{array}\end{array}\) [1]
L’expression de la matrice de masse est:
\(\begin{array}{}M=\frac{\rho S}{{(1+{\phi }_{y})}^{2}}(\begin{array}{cccccc}\frac{13L}{35}+\frac{\mathrm{7L}{\phi }_{y}}{10}+\frac{L{\phi }_{y}^{2}}{3}& & -\frac{{\text{11L}}^{2}}{210}-\frac{{\text{11L}}^{2}{\phi }_{y}}{120}-\frac{{L}^{2}{\phi }_{y}^{2}}{24}& & \frac{\mathrm{9L}}{70}+\frac{\mathrm{3L}{\phi }_{y}}{10}+\frac{L{\phi }_{y}^{2}}{6}& \frac{13{L}^{2}}{420}+\frac{{\mathrm{3L}}^{2}{\phi }_{y}}{40}+\frac{{L}^{2}{\phi }_{y}^{2}}{24}\\ & & \frac{{L}^{3}}{105}+\frac{{L}^{3}{\phi }_{y}}{60}+\frac{{L}^{3}{\phi }_{y}^{2}}{120}& & -\frac{13{L}^{2}}{420}-\frac{{\text{3L}}^{2}{\phi }_{y}}{40}-\frac{{L}^{2}{\phi }_{y}^{2}}{24}& -\frac{{L}^{3}}{140}-\frac{{L}^{3}{\phi }_{y}}{60}-\frac{{L}^{3}{\phi }_{y}^{2}}{120}\\ & & & & \frac{13L}{35}+\frac{\mathrm{7L}{\phi }_{y}}{10}+\frac{L{\phi }_{y}^{2}}{3}& -\frac{11{L}^{2}}{210}+\frac{11{L}^{2}{\phi }_{y}}{120}+\frac{{L}^{2}{\phi }_{y}^{2}}{24}\\ \text{sym}& & & & & \frac{{L}^{3}}{105}+\frac{{L}^{3}{\phi }_{y}}{60}+\frac{{L}^{3}{\phi }_{y}^{2}}{120}\end{array})\\ +\frac{\rho {I}_{y}}{{(1+{\phi }_{y})}^{2}}(\begin{array}{cccc}\frac{6}{\mathrm{5L}}& -\frac{1}{10}+\frac{{\phi }_{y}}{2}& -\frac{6}{\mathrm{5L}}& -\frac{1}{10}+\frac{{\phi }_{y}}{2}\\ & \frac{\mathrm{2L}}{15}+\frac{L{\phi }_{y}}{6}+\frac{L{\phi }_{y}^{2}}{3}& \frac{1}{10}-\frac{{\phi }_{y}}{2}& -\frac{L}{30}-\frac{L{\phi }_{y}}{6}+\frac{L{\phi }_{y}^{2}}{6}\\ & & \frac{6}{\mathrm{5L}}& \frac{1}{10}-\frac{{\phi }_{y}}{2}\\ \text{sym}& & & \frac{\mathrm{2L}}{15}+\frac{L{\phi }_{y}}{6}+\frac{L{\phi }_{y}^{2}}{3}\end{array})\end{array}\)
Flexion dans le plan Gxy, degrés de liberté : g, qz ou Dy, Drz#
De même, pour le mouvement de flexion autour de l’axe \((\mathrm{Gz})\) , dans le plan principal d’inertie \((\mathrm{Gxy})\) , la matrice de rigidité s’écrit:
\(K=\frac{12{\text{EI}}_{z}}{{L}^{3}(1+{\varphi}_{z})}(\begin{array}{cccc}1& \frac{L}{2}& -1& \frac{L}{2}\\ & \frac{(4+{\varphi}_{z}){\text{L}}^{2}}{12}& -\frac{L}{2}& \frac{(2-{\varphi}_{z}){\text{L}}^{2}}{12}\\ & & 1& -\frac{L}{2}\\ \text{sym}& & & \frac{(4+{\varphi}_{z}){\text{L}}^{2}}{12}\end{array})\)
Le cisaillement transverse est pris en compte par le terme:
\({\varphi}_{z}=\frac{12{\text{EI}}_{z}}{{k}_{y}{\text{SGL}}^{2}}\)
Pour calculer la matrice de masse, \(v(\text{x,}t)\) et \({\theta}_{z}(\text{x,}t)\) sont discrétisés par:
\(\begin{array}{}v(\text{x,}t)={\xi}_{1}(x){\text{v}}_{1}(t)-{\xi}_{2}(x){\theta}_{{z}_{1}}(t)+{\xi}_{3}(x){\text{v}}_{2}(t)-{\xi}_{4}(x){\theta}_{{z}_{2}}(t)\\ {\theta}_{z}(\text{x,}t)=-{\xi}_{5}(x){\text{v}}_{1}(t)+{\xi}_{6}(x){\theta}_{{z}_{1}}(t)-{\xi}_{7}(x){\text{v}}_{2}(t)+{\xi}_{8}(x){\theta}_{{z}_{2}}(t)\end{array}\)
Nous obtenons alors la matrice de masse suivante:
\(\begin{array}{}M=\frac{\rho S}{{(1+{\varphi}_{z})}^{2}}(\begin{array}{cccc}\frac{13L}{35}+\frac{\mathrm{7L}{\varphi}_{z}}{10}+\frac{L{\varphi}_{z}^{2}}{3}& \frac{11{L}^{2}}{210}+\frac{11{L}^{2}{\varphi}_{z}}{120}+\frac{{L}^{2}{\varphi}_{z}^{2}}{24}& \frac{\mathrm{9L}}{70}+\frac{\mathrm{3L}{\varphi}_{z}}{10}+\frac{L{\varphi}_{z}^{2}}{6}& -\frac{13{L}^{2}}{420}-\frac{{\mathrm{3L}}^{2}{\varphi}_{z}}{40}-\frac{{L}^{2}{\varphi}_{z}^{2}}{24}\\ & \frac{{L}^{3}}{105}+\frac{{L}^{3}{\varphi}_{z}}{60}+\frac{{L}^{3}{\varphi}_{z}^{2}}{120}& \frac{13{L}^{2}}{420}+\frac{{\mathrm{3L}}^{2}{\varphi}_{z}}{40}+\frac{{L}^{2}{\varphi}_{z}^{2}}{24}& -\frac{{L}^{3}}{140}-\frac{{L}^{3}{\varphi}_{z}}{60}-\frac{{L}^{3}{\varphi}_{z}^{2}}{120}\\ & & \frac{13L}{35}+\frac{\mathrm{7L}{\varphi}_{z}}{10}+\frac{L{\varphi}_{z}^{2}}{3}& \frac{11{L}^{2}}{210}-\frac{11{L}^{2}{\varphi}_{z}}{120}-\frac{{L}^{2}{\varphi}_{z}^{2}}{24}\\ \text{sym}& & & \frac{{L}^{3}}{105}+\frac{{L}^{3}{\varphi}_{z}}{60}+\frac{{L}^{3}{\varphi}_{z}^{2}}{120}\end{array})\\ +\frac{\rho {I}_{z}}{{(1+{\varphi}_{z})}^{2}}(\begin{array}{cccc}\frac{6}{\mathrm{5L}}& \frac{1}{10}-\frac{{\varphi}_{z}}{2}& -\frac{6}{\mathrm{5L}}& \frac{1}{10}-\frac{{\varphi}_{z}}{2}\\ & \frac{\mathrm{2L}}{15}+\frac{L{\varphi}_{z}}{6}+\frac{L{\varphi}_{z}^{2}}{3}& -\frac{1}{10}+\frac{{\varphi}_{z}}{2}& -\frac{L}{30}-\frac{L{\varphi}_{z}}{6}+\frac{L{\varphi}_{z}^{2}}{6}\\ & & \frac{6}{\mathrm{5L}}& -\frac{1}{10}+\frac{{\varphi}_{z}}{2}\\ \text{sym}& & & \frac{\mathrm{2L}}{15}+\frac{L{\varphi}_{z}}{6}+\frac{L{\varphi}_{z}^{2}}{3}\end{array})\end{array}\)
Torsion et gauchissement, degrés de liberté : qx, qx,x ou Drx, Grx#
En ce qui concerne la torsion, la formulation est évidemment différente de celle des poutres sans gauchissement de la référence [R3.08.01]. Le travail virtuel des efforts intérieurs s’écrit pour la torsion[bib]:
\({W}_{int}={\int}_{o}^{L}{\theta}_{\text{x,x}}^{\text{*}}.G.J.{\theta}_{\text{x,x}}+{\theta}_{\text{x,xx}}^{\text{*}}.E.{I}_{\omega}.{\theta}_{\text{x,xx}}\text{dx}\)
Les fonctions d’interpolation de la rotation de torsion doivent être de classe \(\mathrm{C2}\) , puisqu’elles doivent permettre d’interpoler la dérivée seconde de la rotation.
En utilisant les équations d’équilibre, on montre dans [bib] que la solution analytique fait intervenir des fonction d’interpolation hyperboliques en \(x\) . Ceci permet alors d’obtenir des résultats exacts aux nœuds. Ce n’est pas le choix fait pour Code_Aster : on a choisi, par souci de simplicité pour l’intégration numérique ainsi que pour éviter les problèmes numériques d’évaluation des fonction hyperboliques, des polynômes de degré 3 de type Hermite, du même genre que ceux utilisés pour la flexion[éq]. On les écrit ici sur l’élément de référence[-1,1] suivant [bib] (au lieu de \(0<x<L\) précédemment):
\(\begin{array}{}\xi =\frac{\mathrm{2x}}{L}-1\\ -1\le \xi \le 1\end{array}\) , \(\begin{array}{}{N}_{1}(\xi )=\frac{1}{4}{(1-\xi )}^{2}(2+\xi )\\ {N}_{2}(\xi )=\frac{L}{8}(1-\xi )(1-{\xi}^{2})\\ {N}_{3}(\xi )=\frac{1}{4}{(1+\xi )}^{2}(2-\xi )\\ {N}_{4}(\xi )=\frac{L}{8}(1+\xi )(-1+{\xi}^{2})\end{array}\)
L’interpolation pour la rotation de torsion et sa dérivée est:
\({\theta}_{x}(\xi )={N}_{1}(\xi ){\theta}_{{}_{x}}^{1}+{N}_{2}(\xi ){\theta}_{{}_{x,x}}^{1}+{N}_{3}(\xi ){\theta}_{{}_{x}}^{2}+{N}_{4}(\xi ){\theta}_{{}_{x,x}}^{2}\)
\({\theta}_{x,x}(\xi )={N}_{1,x}(\xi ){\theta}_{{}_{x}}^{1}+{N}_{2,x}(\xi ){\theta}_{{}_{x,x}}^{1}+{N}_{3,x}(\xi ){\theta}_{{}_{x}}^{2}+{N}_{4,x}(\xi ){\theta}_{{}_{x,x}}^{2}\)
La référence [bib] note que cette approximation correspond à un cas limite de l’interpolation hyperbolique, obtenu pour \(\sqrt{\frac{\text{GJ}}{{\text{EI}}_{\omega}}}\to 0\) . Toutefois, ce paramètre n’étant pas sans dimension, il est difficile de définir a priori les valeurs pour lesquelles l’approximation est acceptable. Les tests numériques effectués montrent que l’on converge rapidement vers la solution quand la taille des éléments diminue.
La matrice de rigidité correspondant à cette approximation s’écrit alors:
\(K={K}_{T}+{K}_{\omega}=\frac{\text{GJ}}{30L}(\begin{array}{cccc}36& \mathrm{3L}& -36& \mathrm{6L}\\ & {\mathrm{4L}}^{2}& -\mathrm{3L}& -{L}^{2}\\ & & 36& -\mathrm{3L}\\ \text{sym}& & & {\mathrm{4L}}^{2}\end{array})+\frac{{\text{EI}}_{\omega}}{{L}^{3}}(\begin{array}{cccc}12& \mathrm{6L}& -12& \mathrm{6L}\\ & {\mathrm{4L}}^{2}& -\mathrm{6L}& {\mathrm{2L}}^{2}\\ & & 12& -\mathrm{6L}\\ \text{sym}& & & {\mathrm{4L}}^{2}\end{array})\)
La matrice de masse peut être obtenue de plusieurs façons[bib]:
la méthode la plus complète consisterait à calculer les termes d’inertie avec les fonctions d’interpolation ci-dessus, en tenant compte du terme supplémentaire:
\({W}_{\text{iner}}=-{\int}_{o}^{L}{\theta}_{{}_{\text{x,x}}}^{\text{*}}.\rho .{I}_{\omega}.{\ddot{\theta}}_{\text{x,x}}\text{dx}\)
dans Code_Aster , une méthode la plus simple a été choisie : la matrice de masse est identique à celle de l’élément POU_D_T. On conserve les termes déjà définis pour la traction - compression et la flexion - cisaillement et on utilise une approximation linéaire pour la torsion. Les coefficients de la matrice de masse associés au gauchissement sont nuls avec cette approche.
Excentrement de l’axe de torsion par rapport à l’axe neutre#
Au centre de torsion \(C\) , les effets de flexion et de torsion sont découplés, on peut donc utiliser les résultats établis au chapitre précédent.
Les coordonnées du point \(C\) sont à fournir à AFFE_CARA_ELEM: on donne les composantes du vecteur \(\mathrm{GC}\) (\(G\) étant le centre de gravité de la section droite) dans le repère principal d’inertie:
\(\text{GC}=(\begin{array}{c}0\\ {e}_{y}\\ {e}_{z}\end{array})\)
On peut les déterminer numériquement à partir du maillage plan de la section à l’aide de l’opérateur MACR_CARA_POUTRE [R3.08.03].
Une fois le point \(C\) déterminé, on retrouve comme en [R3.08.01] les composantes du déplacement au centre de gravité \(G\) en considérant la relation de corps rigide:
\(u(G)=u(C)+\text{GC}\wedge \Omega\) avec \(\Omega =(\begin{array}{c}{\theta}_{x}\\ 0\\ 0\end{array})\) vecteur rotation, \(\lbrace \begin{array}{c}{u}_{G}{\text{= u}}_{C}\\ {v}_{G}{\text{= v}}_{C}{\text{+e}}_{z}{\theta}_{x}\\ {w}_{G}{\text{= w}}_{C}-{e}_{y}{\theta}_{x}\text{}.\end{array}\)
Le changement de variables s’écrit de la même façon que pour POU_D_T, avec 2 degrés de liberté supplémentaires:
\(\begin{array}{c}(\begin{array}{c}{u}_{{x}_{{c}_{1}}}\\ {u}_{{y}_{{c}_{1}}}\\ {u}_{{z}_{{c}_{1}}}\\ {\theta}_{{x}_{{c}_{1}}}\\ {\theta}_{{y}_{{c}_{1}}}\\ \begin{array}{c}{\theta}_{{z}_{{c}_{1}}}\\ {\theta}_{x,{x}_{{c}_{1}}}\end{array}\\ {u}_{{x}_{{c}_{2}}}\\ {u}_{{y}_{{c}_{2}}}\\ {u}_{{z}_{{c}_{2}}}\\ {\theta}_{{x}_{{c}_{2}}}\\ {\theta}_{{y}_{{c}_{2}}}\\ \begin{array}{}{\theta}_{{z}_{{c}_{2}}}\\ {\theta}_{x,{x}_{{c}_{2}}}\end{array}\end{array})\end{array}=\underset{P}{\underset{\underbrace{}}{(\begin{array}{cccccccccccccc}1& 0& 0& 0& 0& 0& 0& & & & & & & \\ 0& 1& 0& -{e}_{z}& 0& 0& 0& & & & & & & \\ 0& 0& 1& {e}_{y}& 0& 0& 0& & & & 0& & & \\ 0& 0& 0& 1& 0& 0& 0& & & & & & & \\ 0& 0& 0& 0& 1& 0& 0& & & & & & & \\ 0& 0& 0& 0& 0& 1& 0& & & & & & & \\ 0& 0& 0& 0& 0& 0& 1& & & & & & & \\ & & & & & & & 1& 0& 0& 0& 0& 0& 0\\ & & & & & & & 0& 1& 0& -{e}_{z}& 0& 0& 0\\ & & & & & & & 0& 0& 1& {e}_{y}& 0& 0& 0\\ & & & 0& & & & 0& 0& 0& 1& 0& 0& 0\\ & & & & & & & 0& 0& 0& 0& 1& 0& 0\\ & & & & & & & 0& 0& 0& 0& 0& 1& 0\\ & & & & & & & 0& 0& 0& 0& 0& 0& 1\end{array})}}\text{}(\begin{array}{c}{u}_{{x}_{{}_{1}}}\\ {u}_{{y}_{{}_{{}_{1}}}}\\ {u}_{{z}_{{}_{1}}}\\ {\theta}_{{x}_{{}_{1}}}\\ {\theta}_{{y}_{{}_{1}}}\\ {\theta}_{{z}_{{}_{1}}}\\ {\theta}_{x,{x}_{{}_{1}}}\\ {u}_{{x}_{{}_{2}}}\\ {u}_{{y}_{{}_{2}}}\\ {u}_{{z}_{{}_{2}}}\\ {\theta}_{{x}_{{}_{2}}}\\ {\theta}_{{y}_{{}_{2}}}\\ {\theta}_{{z}_{{}_{2}}}\\ {\theta}_{x,{x}_{{}_{2}}}\end{array})\)
A partir des matrices élémentaires de masse et de rigidité calculées précédemment dans le repère \((C,x,y,z)\) où les mouvements de flexion et de torsion sont découplés, on obtient ces matrices dans le repère lié à l’axe neutre \((G,x,y,z)\) par les transformations suivantes:
\(K={P}^{\text{T}}{K}_{c}P\)
\(M={P}^{\text{T}}{M}_{c}P.\)
Rigidité géométrique - Structure précontrainte#
Cette matrice est calculée par l’option rigi_geom. Elle est utilisée pour traiter des problèmes de flambement ou des vibrations de structures précontraintes. Dans le cas d’une structure précontrainte, donc soumise à des efforts initiaux (connus et indépendants du temps), on ne peut pas négliger dans l’équation d’équilibre les termes introduits par le changement de géométrie de l’état sans contrainte à l’état précontraint. Ce changement de géométrie ne modifie l’équation d’équilibre que par l’ajout d’un terme fonction des déplacements et de la précontrainte dont la matrice associée est appelée matrice de rigidité géométrique et qui s’exprime par:
\({W}_{G}=\underset{{V}_{o}}{\int}\frac{\partial {u}_{k}^{\mathrm{3D}}}{\partial {x}_{i}}{\sigma}_{ij}^{o}\frac{\partial {v}_{k}^{\mathrm{3D}}}{\partial {x}_{j}}\text{dV}\)
où \({\sigma}_{ij}^{o}\) désigne le tenseur de précontrainte. Ce terme apparaît naturellement si l’on introduit le tenseur des déformations de GREEN-LAGRANGE dans le travail virtuel de la déformation:
\(\begin{array}{}{E}_{xx}={\varepsilon}_{xx}+{\eta}_{xx}=\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}+\frac{1}{2}\left[{(\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x})}^{2}+{(\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial x})}^{2}+{(\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial x})}^{2}\right]\\ 2{E}_{xy}=2{\varepsilon}_{xy}+2{\eta}_{xy}=\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial y}+\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial x}+\left[\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial y}+\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial y}+\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial y}\right]\\ 2{E}_{xz}=2{\varepsilon}_{xz}+2{\eta}_{xz}=\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial z}+\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial x}+\left[\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial z}+\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{y}^{\mathrm{3D}}}{\partial z}+\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{z}^{\mathrm{3D}}}{\partial z}\right]\end{array}\)
Dans l’expression de ces déformations, les termes quadratiques \({(\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x})}^{2},\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial y}\text{et}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial x}\frac{\partial {u}_{x}^{\mathrm{3D}}}{\partial z}\) sont négligés ici, suivant l’hypothèse couramment effectuée par la plupart des auteurs [bib]. Pour un modèle de poutre, le tenseur de contraintes initiales se réduit dans les axes locaux de la poutre aux composantes \({\sigma}_{xx},{\sigma}_{xy}\) et \({\sigma}_{xz}\) . On utilise la cinématique introduite au [§2]:
\(\lbrace \begin{array}{}{u}_{x}^{\mathrm{3D}}(x,y,z)={u}_{G}(x)+z{\theta}_{y}(x)-y{\theta}_{z}(x)+\omega (y,z){\theta}_{x,x}(x)\\ {u}_{y}^{\mathrm{3D}}(x,y,z)={v}_{C}(x)-(z-{z}_{c}){\theta}_{x}(x)\\ {u}_{z}^{\mathrm{3D}}(x,y,z)={w}_{C}(x)+(y-{y}_{c}){\theta}_{x}(x)\end{array}\)
et l’expression des efforts généralisés en fonction des contraintes :
\({N}^{0}=\underset{S}{\int}{\sigma}_{xx}^{o}\text{ds}{V}_{{}_{y}}^{0}=\underset{S}{\int}{\sigma}_{xy}^{o}\text{ds}{V}_{{}_{z}}^{0}=\underset{S}{\int}{\sigma}_{xz}^{o}\text{ds}{M}_{{}_{y}}^{0}=\underset{S}{\int}z{\sigma}_{{}_{xx}}^{0}\text{ds}{M}_{{}_{z}}^{0}=\underset{S}{\int}-y{\sigma}_{{}_{xx}}^{0}\text{ds}\)
On suppose, de plus, que \({N}^{0}\) , \({V}_{{}_{y}}^{0}\) , \({V}_{{}_{z}}^{0}\) sont constants dans l’élément discrétisé (ce qui est inexact par exemple pour une poutre verticale soumise à son poids propre). Les moments sont supposés varier linéairement:
\({M}_{y}^{0}=\left({M}_{\mathit{y2}}^{0}-{M}_{\mathit{y1}}^{0}\right)\frac{x}{L}+{M}_{\mathit{y1}}^{0}\) \(\frac{\partial {M}_{y}^{0}}{\partial x}-{V}_{z}^{0}=0\)
\({M}_{z}^{0}=\left({M}_{\mathit{z2}}^{0}-{M}_{\mathit{z1}}^{0}\right)\frac{x}{L}+{M}_{\mathit{z1}}^{0}\) \(\frac{\partial {M}_{z}^{0}}{\partial x}+{V}_{y}^{0}=0\)
Ces hypothèses permettent d’exprimer \({W}_{G}\) pour une poutre droite avec gauchissement de la façon suivante:
\(\begin{array}{c}{W}_{G}={\int}_{0}^{L}{N}^{0}\left({v}_{,x}\delta {v}_{,x}+{w}_{,x}\delta {w}_{,x}\right)+{N}^{0}\left(\frac{{I}_{y}+{I}_{z}}{A}+{y}_{c}^{2}+{z}_{c}^{2}\right){\theta}_{x,x}\delta {\theta}_{x,x}\\ +{z}_{c}{N}^{0}\left({v}_{,x}\delta {\theta}_{x,x}+{\theta}_{x,x}\delta {v}_{,x}\right)-{y}_{c}{N}^{0}\left({w}_{,x}\delta {\theta}_{x,x}+{\theta}_{x,x}\delta {w}_{,x}\right)\\ -{M}_{y}^{0}\left({w}_{,x}\delta {\theta}_{,x}+{\theta}_{,x}\delta {w}_{,x}\right)-{M}_{z}^{0}\left({v}_{,x}\delta {\theta}_{,x}+{\theta}_{,x}\delta {v}_{,x}\right)\\ -\left({y}_{c}{V}_{y}^{0}-{z}_{c}{V}_{z}^{0}\right)\left({\theta}_{x,x}\delta {\theta}_{x}+{\theta}_{x}\delta {\theta}_{x,x}\right)+{V}_{y}^{0}\left({w}_{,x}\delta {\theta}_{x}+{\theta}_{x}\delta {w}_{,x}\right)\\ -{V}_{z}^{0}\left({v}_{,x}\delta {\theta}_{x}+{\theta}_{x}\delta {v}_{,x}\right)+\left(\left({\mathrm{2y}}_{c}-\frac{{I}_{{\mathit{yr}}^{2}}}{{I}_{z}}\right){M}_{z}^{0}+\left(-{\mathrm{2z}}_{c}+\frac{{I}_{{\mathit{zr}}^{2}}}{{I}_{y}}\right){M}_{y}^{0}\right){\theta}_{x,x}\delta {\theta}_{x,x}\\ +\left(-\frac{{I}_{\mathit{yr2}}}{{I}_{z}}\frac{{\text{dM}}_{z}^{0}}{\text{dx}}+\frac{{I}_{\mathit{zr2}}}{{I}_{y}}\frac{{\text{dM}}_{y}^{0}}{\text{dx}}\right)\left({\theta}_{x,x}\delta {\theta}_{x}+{\theta}_{x}\delta {\theta}_{x,x}\right)\end{array}\)
avec les termes :
\(\begin{array}{c}{I}_{{\mathit{yr}}^{2}}=\underset{S}{\int}y\left({y}^{2}+{z}^{2}\right)\text{ds}\\ {I}_{{\mathit{zr}}^{2}}=\underset{S}{\int}z\left({y}^{2}+{z}^{2}\right)\text{ds}\end{array}\)
qui représentent la non - symétrie de la section. Dans le cas où la section possède deux axes de symétrie (donc \(C\) est confondu avec \(G\) ), ces termes sont nuls.
Attention, ces termes (qui se nomment IYR2 et IZR2 dans la commande AFFE_CARA_ELEM) ne sont pas calculés actuellement par MACR_CARA_POUTRE. L’utilisateur doit donc les renseigner à partir de valeurs tubulées pour chaque type de section (cornière, rectangle, …).
De plus, pour pouvoir traiter les problèmes de déversement de poutres minces, sollicitées essentiellement par des moments de flexion et des efforts normaux, il faut ajouter l’hypothèse de rotations modérées en torsion [bib], [bib].
Ceci se traduit par la modification suivante du champ de déplacements(uniquement pour le calcul de la rigidité géométrique):
\({u}_{x}^{\mathrm{3D}}(x,y,z)={u}_{G}(x)+z({\theta}_{y}(x)+{\theta}_{x}(x){\theta}_{z}(x))-y({\theta}_{z}(x)-{\theta}_{x}(x){\theta}_{y}(x))+\omega (y,z){\theta}_{x,x}(x)\)
L’origine de cette expression ne peut être détaillée ici. Elle fait l’objet de la thèse de DE VILLE DE GOYET [bib] sur le flambement des poutres à sections minces ouvertes. L’hypothèse des rotations de torsion modérées (et non pas infinitésimales) permet de modéliser correctement le déversement d’une poutre de section mince en torsion (couplage torsion - flexion).
L’hypothèse des rotations modérées conduit à rajouter à \({W}_{{}_{G}}^{0}\) le terme \({W}_{G}^{1}\) :
\({W}_{G}^{1}=\frac{1}{2}{\int}_{o}^{L}-{M}_{z}^{o}\delta ({\theta}_{x}{\theta}_{y,x}+{\theta}_{y}{\theta}_{x,x})+{M}_{y}^{o}\delta ({\theta}_{x}{\theta}_{z,x}+{\theta}_{z}{\theta}_{x,x})+{V}_{y}^{o}\delta ({\theta}_{x}{\theta}_{y})+{V}_{z}^{o}\delta ({\theta}_{x}{\theta}_{z})\)
Finalement, on obtient la matrice de rigidité géométrique en discrétisant \({W}_{{}_{G}}={W}_{{}_{G}}^{0}+{W}_{{}_{G}}^{1}\) à l’aide des mêmes fonctions d’interpolation que la matrice de rigidité du [§4.4]. Après avoir calculé ces matrices, il faut effectuer un changement de repère comme au [§4.5]. On obtient alors une matrice de rigidité géométrique de la forme:
\({K}_{G}=(\begin{array}{cc}{A}_{1}& {A}_{2}\\ {A}_{2}& {A}_{3}\end{array})\)
Les blocs de la matrice sont explicités ci-après. On utilise pour simplifier les expressions:
\(\begin{array}{}{N}_{\text{ey}}^{0}=1.2\frac{{N}^{o}{e}_{y}}{L}{N}_{\text{ez}}^{0}=1.2\frac{{N}^{o}{e}_{z}}{L}\\ {\stackrel{ˉ}{M}}_{y}^{0}=\frac{{M}_{\mathrm{y1}}^{0}+{M}_{\mathrm{y2}}^{0}}{L}{\stackrel{ˉ}{M}}_{z}^{0}=\frac{{M}_{\mathrm{z1}}^{0}+{M}_{\mathrm{z2}}^{0}}{L}\\ \Delta {M}_{y}^{0}=\frac{{M}_{\mathrm{y1}}^{0}-{M}_{\mathrm{y2}}^{0}}{2}\Delta {M}_{z}^{0}=\frac{{M}_{\mathrm{z1}}^{0}-{M}_{\mathrm{z2}}^{0}}{2}\\ \tilde{k}={N}^{o}(\frac{{I}_{y}+{I}_{z}}{S}+{e}_{y}^{2}+{e}_{z}^{2})\\ {\tilde{I}}_{y}=-\frac{{I}_{\text{yr}2}}{{I}_{z}}+2{e}_{y}\\ {\tilde{I}}_{z}=\frac{{I}_{\text{zr}2}}{{I}_{y}}-2{e}_{z}\end{array}\)
A1 |
2 \({v}_{1}\) |
3 \({w}_{1}\) |
4 \({\theta}_{\mathrm{x1}}\) |
5 \({\theta}_{\mathrm{y1}}\) |
6 \({q}_{\mathrm{z1}}\) |
7 \({q}_{x,\mathrm{x1}}\) |
2 \({v}_{1}\) |
\(1.2\frac{{N}^{o}}{L}\) |
\({N}_{\text{ez}}^{0}+\frac{{\stackrel{ˉ}{M}}_{y}^{0}}{2}+1.2\frac{\Delta {M}_{y}^{0}}{L}\) |
\(\frac{{N}^{o}}{10}\) |
\(\frac{{e}_{z}{N}^{0}+L{\stackrel{ˉ}{M}}_{y}^{0}-{M}_{\mathrm{y2}}^{0}}{10}\) |
||
3 \({w}_{1}\) |
\(1.2\frac{{N}^{o}}{L}\) |
\(-{N}_{\text{ey}}^{0}+\frac{{\stackrel{ˉ}{M}}_{z}^{0}}{2}+1.2\frac{\Delta {M}_{z}^{0}}{L}\) |
\(-\frac{{N}^{o}}{10}\) |
\(\frac{-{e}_{y}{N}^{0}+L{\stackrel{ˉ}{M}}_{z}^{0}-{M}_{\mathrm{z2}}^{0}}{10}\) |
||
4 \({\theta}_{\mathrm{x1}}\) |
\(\begin{array}{}\frac{1.2}{L}(\tilde{k}-\Delta {M}_{z}^{0}{\tilde{I}}_{y}-\Delta {M}_{y}^{0}{\tilde{I}}_{z})\\ -({e}_{y}+\frac{{I}_{\text{yr}2}}{{\mathrm{2I}}_{z}}){\stackrel{ˉ}{M}}_{z}^{0}+({e}_{z}+\frac{{I}_{\text{zr}2}}{{\mathrm{2I}}_{y}}){\stackrel{ˉ}{M}}_{y}^{0}\end{array}\) |
\(\begin{array}{}\frac{{e}_{y}{N}^{0}+L{\stackrel{ˉ}{M}}_{z}^{0}+{M}_{\mathrm{z2}}^{0}}{10}\\ -\frac{{M}_{\mathrm{z1}}^{0}}{2}\end{array}\) |
\(\begin{array}{}\frac{{e}_{z}{N}^{0}-L{\stackrel{ˉ}{M}}_{y}^{0}-{M}_{\mathrm{y2}}^{0}}{10}\\ +\frac{{M}_{\mathrm{y1}}^{0}}{2}\end{array}\) |
\(\frac{\tilde{k}+{M}_{\mathrm{z2}}^{0}{\tilde{I}}_{y}+{M}_{\mathrm{y2}}^{0}{\tilde{I}}_{z}}{10}\) |
||
5 \({\theta}_{\mathrm{y1}}\) |
\(\frac{2L{N}^{0}}{15}\) |
\(\frac{2{e}_{y}{\text{LN}}^{0}}{15}-\frac{L({\mathrm{3M}}_{\mathrm{z1}}^{0}-{M}_{\mathrm{z2}}^{0})}{30}\) |
||||
6 \({\theta}_{\mathrm{z1}}\) |
sym |
\(\frac{2L{N}^{0}}{15}\) |
\(\frac{2{e}_{z}{\text{LN}}^{0}}{15}-\frac{L({\mathrm{3M}}_{\mathrm{y1}}^{0}-{M}_{\mathrm{y2}}^{0})}{30}\) |
|||
7 \({\theta}_{x,\mathrm{x1}}\) |
\(\begin{array}{}\frac{4\tilde{k}L-L{\tilde{I}}_{y}(3{M}_{\mathrm{z1}}^{0}-{M}_{\mathrm{z2}}^{0})}{30}\\ -\frac{L{\tilde{I}}_{z}(3{M}_{\mathrm{y1}}^{0}-{M}_{\mathrm{y2}}^{0})}{30}\end{array}\) |
A2 |
9 \({v}_{2}\) |
10: \({w}_{2}\) |
11: \({\theta}_{\mathrm{x2}}\) |
12: \({\theta}_{\mathrm{y2}}\) |
13: \({\theta}_{\mathrm{z2}}\) |
14: \({\theta}_{x,\mathrm{x2}}\) |
2 \({v}_{1}\) |
\(1.2\frac{{N}^{o}}{L}\) |
\(-{N}_{\text{ez}}^{0}+\frac{{\stackrel{ˉ}{M}}_{y}^{0}}{2}-1.2\frac{\Delta {M}_{y}^{0}}{L}\) |
\(\frac{{N}^{o}}{10}\) |
\(\frac{{e}_{z}{N}^{0}-L{\stackrel{ˉ}{M}}_{y}^{0}+{M}_{\mathrm{y1}}^{0}}{10}\) |
||
3 \({w}_{1}\) |
\(-1.2\frac{{N}^{o}}{L}\) |
\({N}_{\text{ey}}^{0}+\frac{{\stackrel{ˉ}{M}}_{z}^{0}}{2}-1.2\frac{\Delta {M}_{z}^{0}}{L}\) |
\(-\frac{{N}^{o}}{10}\) |
\(\frac{-{e}_{y}{N}^{0}-L{\stackrel{ˉ}{M}}_{z}^{0}+{M}_{\mathrm{z1}}^{0}}{10}\) |
||
4 \({\theta}_{\mathrm{x1}}\) |
\({N}_{\text{ey}}^{0}-\frac{{\stackrel{ˉ}{M}}_{z}^{0}}{2}-1.2\frac{\Delta {M}_{z}^{0}}{L}\) |
-A1(4,4) |
\(\frac{{e}_{y}{N}^{0}-L{\stackrel{ˉ}{M}}_{z}^{0}-{M}_{\mathrm{z1}}^{0}}{10}\) |
\(\frac{{e}_{z}{N}^{0}+L{\stackrel{ˉ}{M}}_{y}^{0}+{M}_{\mathrm{y1}}^{0}}{10}\) |
\(\frac{\tilde{k}-{M}_{\mathrm{y1}}^{0}{\tilde{I}}_{z}-{M}_{\mathrm{z1}}^{0}{\tilde{I}}_{y}}{10}\) |
|
5 \({\theta}_{\mathrm{y1}}\) |
\(\frac{{N}^{o}}{10}\) |
\(\frac{-{e}_{y}{N}^{0}-L{\stackrel{ˉ}{M}}_{z}^{0}-{M}_{\mathrm{z2}}^{0}}{10}\) |
\(-\frac{{\text{LN}}^{o}}{30}\) |
\(\begin{array}{}\frac{-{e}_{y}{\text{LN}}^{0}+L\Delta {M}_{z}^{0}}{30}\\ +\frac{{L}^{2}{\stackrel{ˉ}{M}}_{z}^{0}}{60}\end{array}\) |
||
6 \({\theta}_{\mathrm{z1}}\) |
\(-\frac{{N}^{o}}{10}\) |
\(\frac{-{e}_{z}{N}^{0}+L{\stackrel{ˉ}{M}}_{y}^{0}+{M}_{\mathrm{y2}}^{0}}{10}\) |
\(-\frac{{\text{LN}}^{o}}{30}\) |
\(\begin{array}{}\frac{-{e}_{z}{\text{LN}}^{0}-L\Delta {M}_{y}^{0}}{30}\\ -\frac{{L}^{2}{\stackrel{ˉ}{M}}_{y}^{0}}{60}\end{array}\) |
||
7 \({\theta}_{x,x}\) |
\(\frac{-{e}_{z}{N}^{0}-L{\stackrel{ˉ}{M}}_{y}^{0}+{M}_{\mathrm{y2}}^{0}}{10}\) |
\(\frac{{e}_{y}{N}^{0}-L{\stackrel{ˉ}{M}}_{z}^{0}+{M}_{\mathrm{z2}}^{0}}{10}\) |
\(\frac{-\tilde{k}-{M}_{\mathrm{y2}}^{0}{\tilde{I}}_{z}-{M}_{\mathrm{z2}}^{0}{\tilde{I}}_{y}}{10}\) |
\(\begin{array}{}\frac{-{e}_{y}{\text{LN}}^{0}+L\Delta {M}_{z}^{0}}{30}\\ -\frac{{L}^{2}{\stackrel{ˉ}{M}}_{z}^{0}}{60}\end{array}\) |
\(\begin{array}{}\frac{-{e}_{z}{\text{LN}}^{0}-L\Delta {M}_{y}^{0}}{30}\\ +\frac{{L}^{2}{\stackrel{ˉ}{M}}_{y}^{0}}{60}\end{array}\) |
\(\begin{array}{}\frac{-\tilde{k}L+L\Delta {M}_{y}^{0}{\tilde{I}}_{z}}{30}\\ +\frac{L\Delta {M}_{z}^{0}{\tilde{I}}_{y}}{30}\end{array}\) |
A3 |
9: \({v}_{2}\) |
10: \({w}_{2}\) |
11: \({\theta}_{\mathrm{x2}}\) |
12: \({\theta}_{\mathrm{y2}}\) |
13: \({\theta}_{\mathrm{z2}}\) |
14: \({\theta}_{x,\mathrm{x2}}\) |
2 \({v}_{2}\) |
\(1.2\frac{{N}^{o}}{L}\) |
\({N}_{\text{ez}}^{0}-\frac{{\stackrel{ˉ}{M}}_{y}^{0}}{2}+1.2\frac{\Delta {M}_{y}^{0}}{L}\) |
\(-\frac{{N}^{o}}{10}\) |
\(\frac{-{e}_{z}{N}^{0}+L{\stackrel{ˉ}{M}}_{y}^{0}-{M}_{\mathrm{y1}}^{0}}{10}\) |
||
3 \({w}_{2}\) |
\(1.2\frac{{N}^{o}}{L}\) |
\(-{N}_{\text{ey}}^{0}-\frac{{\stackrel{ˉ}{M}}_{z}^{0}}{2}+1.2\frac{\Delta {M}_{z}^{0}}{L}\) |
\(\frac{{N}^{o}}{10}\) |
\(\frac{{e}_{y}{N}^{0}+L{\stackrel{ˉ}{M}}_{z}^{0}-{M}_{\mathrm{z1}}^{0}}{10}\) |
||
4 \({\theta}_{\mathrm{x2}}\) |
\(\begin{array}{}1.2\frac{\tilde{k}}{L}-1.2(\frac{\Delta {M}_{z}^{0}}{L}{\tilde{I}}_{y}+\frac{\Delta {M}_{y}^{0}}{L}{\tilde{I}}_{z})\\ +({e}_{y}+\frac{{I}_{\text{yr}2}}{{\mathrm{2I}}_{z}}){\stackrel{ˉ}{M}}_{z}^{0}-({e}_{z}+\frac{{I}_{\text{zr}2}}{{\mathrm{2I}}_{y}}){\stackrel{ˉ}{M}}_{y}^{0}\end{array}\) |
\(\begin{array}{}\frac{-{e}_{y}{N}^{0}+L{\stackrel{ˉ}{M}}_{z}^{0}+{M}_{\mathrm{z1}}^{0}}{10}\\ -\frac{{M}_{\mathrm{z2}}^{0}}{2}\end{array}\) |
\(\begin{array}{}\frac{-{e}_{z}{N}^{0}-L{\stackrel{ˉ}{M}}_{y}^{0}-{M}_{\mathrm{y1}}^{0}}{10}\\ +\frac{{M}_{\mathrm{y2}}^{0}}{2}\end{array}\) |
\(\frac{-\tilde{k}+{M}_{\mathrm{y1}}^{0}{\tilde{I}}_{z}+{M}_{\mathrm{z1}}^{0}{\tilde{I}}_{y}}{10}\) |
||
5 \({\theta}_{\mathrm{y2}}\) |
\(\frac{2LN°}{15}\) |
\(\frac{2{e}_{y}{\text{LN}}^{0}}{15}-\frac{L({M}_{\mathrm{z1}}^{0}-{\mathrm{3M}}_{\mathrm{z2}}^{0})}{30}\) |
||||
6 \({\theta}_{\mathrm{z2}}\) |
\(\frac{2LN°}{15}\) |
\(\frac{2{e}_{z}{\text{LN}}^{0}}{15}+\frac{L({M}_{\mathrm{y1}}^{0}-{\mathrm{3M}}_{\mathrm{y2}}^{0})}{30}\) |
||||
7 \({\theta}_{x,\mathrm{x2}}\) |
Sym |
\(\begin{array}{}\frac{4\tilde{k}L-L{\tilde{I}}_{y}({M}_{\mathrm{z1}}^{0}-{\mathrm{3M}}_{\mathrm{z2}}^{0})}{30}\\ \text{}-\frac{L{\tilde{I}}_{z}({M}_{\mathrm{y1}}^{0}-{\mathrm{3M}}_{\mathrm{y2}}^{0})}{30}\end{array}\) |
Chargements#
Les différents types de chargement disponibles pour l’élément POU_D_TG sont:
Types ou options |
|
CHAR_MECA_FR1D1D |
chargement réparti par valeurs réelles |
CHAR_MECA_FF1D1D |
chargement réparti par fonction |
CHAR_MECA_PESA_R |
chargement dû à la pesanteur |
CHAR_MECA_TEMP_R |
chargement “thermique” |
CHAR_MECA_EPSI_R |
chargement par imposition d’une déformation (de type stratification thermique) |
Les chargements sont calculés de la même façon que pour les éléments sans gauchissement [R3.08.01]. Il n’y a donc rien de particulier à l’élément POU_D_TG. Les autres types de chargement décrits dans [R3.08.01] ne sont pas disponibles pour cet élément.
En ce qui concerne le gauchissement, il est possible de donner des conditions aux limites faisant intervenir le degré de liberté \(\mathit{GRX}\) (ce qui permet de modéliser la torsion gênée: \(\mathrm{GRX}=0\) ), mais par contre, rien n’est prévu pour affecter un chargement de type bi-moment, dont l’interprétation physique est difficile à établir.
A propos du raccordement entre éléments, la transmission du gauchissement est une question ouverte comme le signale la référence [bib]: la continuité de la variable \(\mathit{GRX}\) d’un élément à l’autre (dont dépend directement le gauchissement) dépend en fait de la technologie de la liaison entre les différentes poutres (soudure dans l’axe, auquel cas le gauchissement peut se transmettre intégralement, liaison par gousset, …).
Pour une structure assemblée telle qu’un treillis, il semble plus raisonnable de supposer que la torsion est gênée, donc que le gauchissement est nul aux extrémités. Pour cerner l’influence de cette hypothèse, on pourra se reporter au test SSLL102 (poutre de section cornière) dont les modélisations C et D utilisent l’élément POU_D_TG, avec torsion libre pour la modélisation C, et torsion gênée pour la modélisation D [V3.01.102B].
On constate que pour le chargement de flexion, l’écart sur le déplacement est faible (2.5%), mais pour un chargement en torsion, on obtient pour cette section un déplacement latéral non nul (déversement) dont la valeur diffère notablement suivant l’hypothèse prise:
\({u}_{z}=2.2{10}^{-5}\) pour la torsion libre et \({u}_{z}=2.62{10}^{-5}\) pour la torsion gênée.
De même, la rotation varie fortement:
\({\theta}_{x}=3,79{10}^{-4}\) pour la torsion libre et \({\theta}_{x}=6,39{10}^{-4}\) pour la torsion gênée (GRX est nul aux extrémités).
Chargements répartis, options : CHAR_MECA_FR1D1D et CHAR_MECA_FF1D1D#
Les chargements sont donnés sous le mot-clé FORCE_POUTRE, soit par des valeurs réelles dans AFFE_CHAR_MECA (option CHAR_MECA_FR1D1D), soit par fonctions dans AFFE_CHAR_MECA_F (option CHAR_MECA_FF1D1D). Le chargement n’est donné que par des forces réparties, pas par des moments répartis.
Le second membre associé au chargement réparti de traction - compression est:
\(\begin{array}{}\left[\begin{array}{c}{f}_{1}\\ {f}_{2}\end{array}\right]\end{array}\) avec \({f}_{1}={\int}_{0}^{1}{f}_{\text{ext}}(x)(1-\frac{x}{L})\text{dx}\)
\({f}_{2}={\int}_{0}^{1}{f}_{\text{ext}}(x)\frac{x}{L}\text{dx}\)
Pour un chargement constant ou variant linéairement, on obtient:
\(\begin{array}{}{F}_{{x}_{1}}=L(\frac{{n}_{1}}{3}+\frac{{n}_{2}}{6}),\\ {F}_{{x}_{2}}=L(\frac{{n}_{1}}{6}+\frac{{n}_{2}}{3}).\end{array}\)
\({n}_{1}\) et \({n}_{2}\) sont les composantes du chargement axial aux points 1 et 2 provenant des données de l’utilisateur replacées dans le repère local.
Si \({t}_{{y}_{1}},{t}_{\mathrm{y2}},{t}_{\mathrm{z1}}\) et \({t}_{\mathrm{z2}}\) sont celles de l’effort tranchant, on a:
\(\begin{array}{cccc}{F}_{{y}_{1}}=L(\frac{7{t}_{{y}_{1}}}{20}+\frac{3{t}_{{y}_{2}}}{20})& & {M}_{{z}_{1}}={L}^{2}(\frac{{t}_{{y}_{1}}}{20}+\frac{{t}_{{y}_{2}}}{30})& \\ {F}_{{y}_{2}}=L(\frac{3{t}_{{y}_{1}}}{20}+\frac{7{t}_{{y}_{2}}}{20})& & {M}_{{z}_{2}}=-{L}^{2}(\frac{{t}_{{y}_{1}}}{30}+\frac{{t}_{{y}_{2}}}{20}),& \\ {F}_{{z}_{1}}=L(\frac{7{t}_{{z}_{1}}}{20}+\frac{3{t}_{{z}_{2}}}{20}),& & {M}_{{y}_{1}}=-{L}^{2}(\frac{{t}_{{z}_{1}}}{20}+\frac{{t}_{{z}_{2}}}{30}),& \\ {F}_{{z}_{2}}=L(\frac{3{t}_{{z}_{1}}}{20}+\frac{7{t}_{{z}_{2}}}{20}),& & {M}_{{y}_{2}}={L}^{2}(\frac{{t}_{{z}_{1}}}{30}+\frac{{t}_{{z}_{2}}}{20}).& \end{array}\)
Chargement de pesanteur, option : CHAR_MECA_PESA_R#
La force de pesanteur est donnée par le module de l’accélération \(g\) et un vecteur normé \(n\) indiquant la direction du chargement.
Remarques (hypothèse simplificatrice):
Les fonctions de forme utilisées pour ce calcul sont celles du modèle Euler-Bernoulli.
La démarche est similaire à celle utilisée pour les forces réparties, à condition de transformer d’abord le vecteur chargement dû à la pesanteur dans le repère local à l’élément. On obtient dans le repère local de la poutre:
\(\begin{array}{}{F}_{{x}_{i}}={\int}_{o}^{L}{\xi}_{i}\rho Sg\cdot x\text{dx}\\ ({\xi}_{1}=1-\frac{x}{L},{\xi}_{2}=\frac{x}{L})\end{array}\) d’où: \(\begin{array}{}{F}_{{x}_{1}}=\rho g\cdot xL(\frac{S}{3}+\frac{S}{6})\text{}\text{au point 1,}\\ {F}_{{x}_{2}}=\rho g\cdot xL(\frac{S}{6}+\frac{S}{3})\text{}\text{au point 2}\end{array}\)
Flexion dans le plan \((\mathrm{Gxz})\) :
\(\begin{array}{}{F}_{{z}_{1}}=\rho g\cdot zL(\frac{7S}{20}+\frac{3S}{20})\\ {M}_{{y}_{1}}=-\rho g\cdot z\text{}{L}^{2}(\frac{S}{20}+\frac{S}{30})\\ {F}_{{z}_{2}}=\rho g\cdot zL(\frac{3S}{20}+\frac{7S}{20})\\ {M}_{{y}_{2}}=\rho g\cdot z{L}^{2}(\frac{S}{30}+\frac{S}{20})\end{array}\)
Flexion dans le plan \((\mathrm{Gxy})\) :
\(\begin{array}{}{F}_{{y}_{1}}=\rho g\cdot yL(\frac{7S}{20}+\frac{3S}{20})\\ {M}_{{z}_{1}}=\rho g\cdot y\text{}{L}^{2}(\frac{S}{20}+\frac{S}{30})\\ {F}_{{y}_{2}}=\rho g\cdot yL(\frac{3S}{20}+\frac{7S}{20})\\ {M}_{{z}_{2}}=-\rho g\cdot y{L}^{2}(\frac{S}{30}+\frac{S}{20})\end{array}\)
Chargement thermique, option : CHAR_MECA_TEMP_R#
Pour obtenir ce chargement, il faut calculer les déplacements axiaux induits par la différence de température \(T-{T}_{\text{référence}}\) :
\(\begin{array}{}{u}_{1}=-L\alpha (T-{T}_{\text{référence}})\\ {u}_{2}=L\alpha (T-{T}_{\text{référence}})\end{array}\)
(\(\alpha\) : coefficient de dilatation thermique)
Ensuite, on calcule simplement les forces induites par \(F=\text{K u}\) .
Comme \(K\) est la matrice de rigidité locale à l’élément, on doit ensuite effectuer un changement de repère pour obtenir les valeurs des composantes du chargement dans le repère global.
Chargement par déformation imposée, option : CHAR_MECA_EPSI_R#
On calcule comme pour les éléments POU_D_T le chargement à partir d’un état de déformation (cette option a été développée pour prendre en compte la stratification thermique dans les tuyauteries). Le modèle ne prend en compte qu’un travail en traction - compression et en flexion pure (pas d’effort tranchant, pas de moment de torsion).
La déformation est donnée par l’utilisateur à l’aide du mot-clé PRE_EPSI dans AFFE_CHAR_MECA. En se donnant \(\frac{\partial u}{\partial x},\frac{\partial {\theta}_{y}}{\partial x}\) et \(\frac{\partial {\theta}_{z}}{\partial x}\) sur la poutre, on obtient le second membre élémentaire associé à ce chargement:
au nœud 1 :
\(\begin{array}{cccc}& {F}_{{x}_{1}}& =& E{S}_{1}\frac{\partial u}{\partial x},\\ & {M}_{{y}_{1}}& =& E{I}_{{y}_{1}}\frac{\partial {\theta}_{y}}{\partial x},\\ & {M}_{{z}_{1}}& =& E{I}_{{z}_{1}}\frac{\partial {\theta}_{z}}{\partial x},\end{array}\)
au nœud 2 :
\(\begin{array}{cccc}& {F}_{{x}_{2}}& =& E{S}_{2}\frac{\partial u}{\partial x},\\ & {M}_{{y}_{2}}& =& E{I}_{{y}_{2}}\frac{\partial {\theta}_{y}}{\partial x},\\ & {M}_{{z}_{2}}& =& E{I}_{{z}_{2}}\frac{\partial {\theta}_{z}}{\partial x}\end{array}\)
Torseur des efforts - Forces nodales et réactions#
Options disponibles#
Les différentes options de post-traitement disponibles pour l’élément POU_D_TG sont:
Types ou options |
|
EFGE_ELNO |
torseur des efforts aux 2 nœuds de chaque élément |
SIEF_ELGA |
champ d’efforts nécessaire au calcul des forces nodales (option “FORC_NODA”)et des réactions (option “REAC_NODA”). |
FORC_NODA |
forces nodales exprimées dans le repère global |
REAC_NODA |
réactions nodales |
Le torseur des efforts#
Efforts généralisés, option : EFGE_ELNO#
On cherche à calculer aux deux nœuds de chaque élément « poutre » constituant le maillage de la structure étudiée, les efforts exercés sur l’élément « poutre » par le reste de la structure. Les valeurs sont données dans la base locale de chaque élément. En intégrant les équations d’équilibre, on obtient les efforts dans le repère local de l’élément:
\({R}_{\text{LOC}}={K}_{\text{LOC}}^{e}{u}_{\text{LOC}}+{M}_{\text{LOC}}^{e}{\ddot{u}}_{\text{LOC}}-{f}_{\text{LOC}}^{e}\)
où : \({R}_{\text{LOC}}=(-{N}^{1},-{V}_{Y}^{1},-{V}_{Z}^{1},-{M}_{T}^{1},-{M}_{Y}^{1},-{M}_{Z}^{1},-{M}_{\omega}^{1},{N}^{2},{V}_{Y}^{2},{V}_{Z}^{2},{M}_{T}^{2},{M}_{Y}^{2},{M}_{Z}^{2},{M}_{\omega}^{2})\)
\({K}_{\text{LOC}}^{e}\) |
matrice élémentaire de rigidité de l’élément poutre, |
\({M}_{\text{LOC}}^{e}\) |
matrice élémentaire de masse de l’élément poutre, |
\({f}_{\text{LOC}}^{e}\) |
vecteur des efforts “répartis” sur l’élément poutre, |
\({u}_{\text{LOC}}\) |
vecteur “degré de liberté” limité à l’élément poutre, |
\({\ddot{u}}_{\text{LOC}}\) |
vecteur “accélération” limité à l’élément poutre. |
On change ensuite les signes des efforts au nœud 1.
En effet, en prenant par exemple le cas de la traction - compression, on montre [R3.08.01] que les efforts dans l’élément (option EFGE_ELNO) s’obtiennent par:
\(\left[\begin{array}{c}-N(o)\\ N(L)\end{array}\right]=\left[K\right]\left[\begin{array}{c}u(o)\\ u(L)\end{array}\right]-\left[\begin{array}{c}{f}_{1}\\ {f}_{2}\end{array}\right]\)
Efforts généralisés, option : SIEF_ELGA#
L’option « SIEF_ELGA » est implantée pour des raisons de compatibilité avec d’autres options. Elle ne sert qu’au calcul des forces nodales. Elle produit un champs d’efforts par éléments. Elle est calculée par:
\({R}_{\text{LOC}}={K}_{\text{LOC}}^{e}{u}_{\text{LOC}}\)
Calcul des forces nodales et des réactions#
Forces nodales, option : FORC_NODA#
Cette option calcule un vecteur de forces nodales sur toute la structure, exprimées en repère global. Elle produit un champ aux nœuds dans la commande CALC_CHAMP par assemblage des termes élémentaires.
Pour ce calcul, on utilise le principe des travaux virtuels et on écrit[R5.03.01]:
\(F={Q}^{T}\sigma\)
où \({Q}^{T}\) représente symboliquement la matrice associée à l’opérateur divergence. Pour un élément, on écrit le travail du champ de déformations virtuelles:
\(({Q}^{T}\sigma ){u}^{\text{*}}={\int}_{\Omega}\sigma (u)\varepsilon ({u}^{\text{*}})\forall {u}^{\text{*}}\) cinématiquement admissible
Pour les éléments de poutre, on calcule simplement les forces nodales par assemblage des forces nodales élémentaires calculées par l’option SIEF_ELGA, qui s’expriment par:
\(\left[{F}_{\text{LOC}}\right]=\left[{K}_{\text{LOC}}\right]\left[{U}_{\text{LOC}}\right]\)
Réactions nodales, option : REAC_NODA#
Cette option, appelée par CALC_CHAMP, permet d’obtenir les réactions \(R\) aux appuis, exprimées dans le repère global, à partir des forces nodales \(F\) par:
\(R=F-{F}^{\text{char}}+{F}^{\text{iner}}\)
\({F}^{\text{char}}\text{et}{F}^{\text{iner}}\) étant les forces nodales associées respectivement aux chargements donnés (ponctuels et répartis) et aux efforts d’inertie.
Bibliographie#
[1] J.L. BATOZ, G. DHATT. «Modélisation des structures par éléments finis» - HERMES.
[2] V. DE VILLE DE GOYET. «L’analyse statique non linéaire par la méthode des éléments finis des structures spatiales formées de poutres à sections non symétriques» Thèse de l’Université de Liège. 1989.
[3] J. SLIMI. «Simulation de ruine de pylône» Rapport SERAM N°14.033, ENSAM Juin 1993.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
04/07/09 |
J.L. FLEJOU , J.M. PROIX (EDF-R&D/AMA) |
|
22/02/2013 |
J.L. FLEJOU |
Ajout remarques sur pou_d_tgm. |