v6.04.515 SSNV515 – Essai de traction avec la loi de Rankine#
Résumé
On réalise un essai de traction simple avec la loi de Rankine . Les solutions calculées sont comparées à une solution analytique. Trois modélisations dont proposées :
une modélisation 0D avec SIMU_POINT_MAT;
une modélisation 3D;
une modélisation 2D axisymétrique;
Solution analytique#
Introduisons d’abord les notations suvantes:
Avec \(K=\frac{E}{3\left(1-2\nu \right)}\) et \(G=\frac{E}{2\left(1+\nu \right)}\) les modules de compressibilité et de cisaillement, respectivement.
Soit \(C\) le tenseur d’éalsticité de Hooke, on aura avec l’hypothèse \({{\varepsilon}}_{yy}={{\varepsilon}}_{xx}\) :
On notera pour simplifier la contrainte verticale à l’instant \(+\) \({\sigma}^{+}={\sigma}_{zz}^{+}\) , de sorte que le critère de Rankine s’écrit:
On a par ailleurs:
Avec \(n=\left(\begin{array}{c}0\\ 0\\ 1\end{array}\right)\) et où:
D’après la loi d’écoulement associée, on a aussi:
Comme \(n=\left(\begin{array}{c}0\\ 0\\ 1\end{array}\right)\) , on obtient:
La combinaison des équations (), () et () nous donne la contrainte \({\sigma}_{zz}^{+}\) . Les équations () et () nous donnent la norme de la déformation plastique déviatorique \({e}^{P}\) .
Essayons d’obtenir maintenant l’expression de la déformation élastique horizontale \({{\varepsilon}}_{xx}^{\text{élas}}\) .
Latéralement, on a la condition \({\sigma}_{xx}^{+}={P}_{0}\) , soit:
Avec \(\Delta {\sigma}_{xx,C}=d\lambda B\)
On obtient alors en utilisant l’équation ():
D’où l’incrément de déformation élastique horizontale:
Modélisation A#
Caractéristiques de la modélisation#
La modélisation A est réalisée sur un point matériel0D avec SIMU_POINT_MAT.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont post-traitées au point \(C\) , en termes de:
contrainte verticale \({\sigma}_{zz}\) ;
déformation horizontale \({{\varepsilon}}_{xx}\) ;
norme de la déformation plastique déviatorique \({e}^{P}=\Vert {e}^{P}\Vert\)
Elles sont comparées à une solution analytique (décrite dans le paragraphe suivant) en termes d” écart maximal entre \(t=0\) et \(t=20\) . Les résultats sont récapitulés dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
Variable |
Ecart absolu | Code_Aster - Analytique | |
\({\sigma}_{zz}\) |
0 |
\({{\varepsilon}}_{xx}\) |
3.10-5 |
\({e}^{P}\) |
1.333 10-5 |
Commentaires#
L’écart avec la solution analytique est très faible.
Modélisation B#
Caractéristiques de la modélisation#
La modélisation B est réalisée en 3D avec STAT_NON_LINE.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont post-traitées au point \(C\) , en termes de:
contrainte verticale \({\sigma}_{zz}\) ;
déformation horizontale \({{\varepsilon}}_{xx}\) ;
norme de la déformation plastique déviatorique \({e}^{P}=\Vert {e}^{P}\Vert\)
Elles sont comparées à une solution analytique (décrite dans le paragraphe suivant) en termes d” écart maximal entre \(t=0\) et \(t=20\) . Les résultats sont récapitulés dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
Variable |
Ecart absolu | Code_Aster - Analytique | |
\({\sigma}_{zz}\) |
0 |
\({{\varepsilon}}_{xx}\) |
3.10-5 |
\({e}^{P}\) |
1.333 10-5 |
Commentaires#
L’écart avec la solution analytique est très faible.
Modélisation C#
Caractéristiques de la modélisation#
La modélisation C est réalisée sur un point matériel2D axisymétrique avec STAT_NON_LINE.
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont post-traitées au point \(C\) , en termes de:
contrainte verticale \({\sigma}_{zz}\) ;
déformation horizontale \({{\varepsilon}}_{xx}\) ;
norme de la déformation plastique déviatorique \({e}^{P}=\Vert {e}^{P}\Vert\)
Elles sont comparées à une solution analytique (décrite dans le paragraphe suivant) en termes d” écart maximal entre \(t=0\) et \(t=20\) . Les résultats sont récapitulés dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}\phantom{\rule{2em}{0ex}}[\mathit{Pa}]\)
Variable |
Ecart absolu | Code_Aster - Analytique | |
\({\sigma}_{zz}\) |
0 |
\({{\varepsilon}}_{xx}\) |
3.10-5 |
\({e}^{P}\) |
1.333 10-5 |
Commentaires#
L’écart avec la solution analytique est très faible.
Modélisation D#
Caractéristiques de la modélisation#
La modélisation D est réalisée sur un point matériel3D avec STAT_NON_LINE. La différence par rapport à la modélisation B est le calcul de l’état initial par un chargement thermique. Pour amener l’échantillon à la contrainte isotrope initiale \({P}_{0}=10\mathit{kPa}\) , on amène l’échantillon de 20° à 30° celcius. Les déplacements de l’échantillon sont bloqués, de sorte que la dilatation thermique amène l’échantillon en compression. On obtient:
\({\sigma}_{0}=\frac{E}{9\left(1-2\nu \right)}\alpha \Delta T={P}_{0}\)
Soit la valeur suivante du coefficient de dilatation thermique: \(\alpha =\frac{9\left(1-2\nu \right){P}_{0}}{E\Delta T}\)
Grandeurs testées et résultats#
Valeurs testées#
Les solutions sont post-traitées au point \(C\) , en termes de:
contrainte verticale \({\sigma}_{zz}\) ;
déformation horizontale \({{\varepsilon}}_{xx}\) ;
norme de la déformation plastique déviatorique \({e}^{P}=\Vert {e}^{P}\Vert\)
Elles sont comparées à une solution analytique (décrite dans le paragraphe suivant) en termes d” écart maximal entre \(t=0\) et \(t=20\) . Les résultats sont récapitulés dans les tableaux suivants:
\(Q=\sqrt{\frac{1}{2}\underline{\underline{s}}:\underline{\underline{s}}}[\mathit{Pa}]\)
Variable |
Ecart absolu | Code_Aster - Analytique | |
\({\sigma}_{zz}\) |
0 |
\({{\varepsilon}}_{xx}\) |
3.10-5 |
\({e}^{P}\) |
1.333 10-5 |
Commentaires#
L’écart avec la solution analytique est très faible.
Synthèse des résultats#
On représente dans les figures suivantes l’évolution des différentes grandeurs lors de l’essai de traction avec la loi de Rankine.
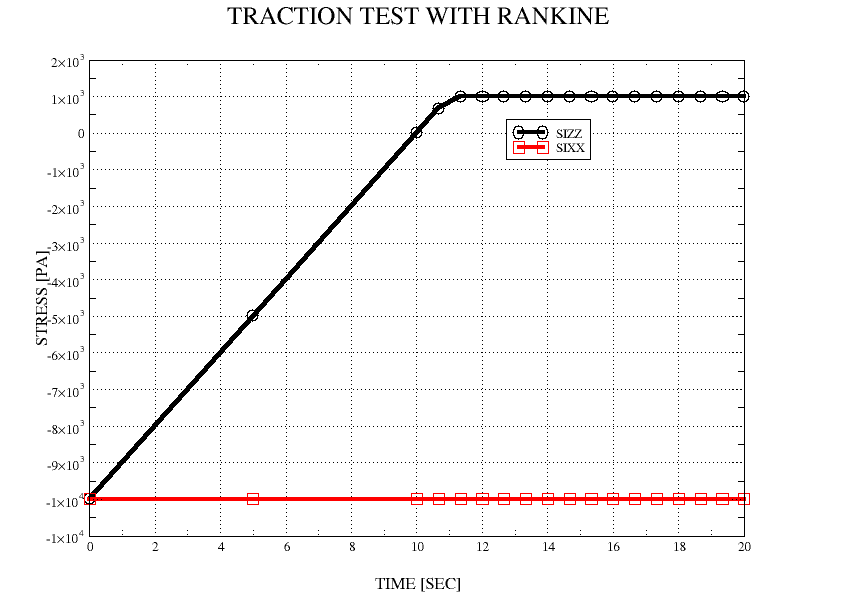
Fig. 668 Evolution des contraintes lors de l’essai de traction#
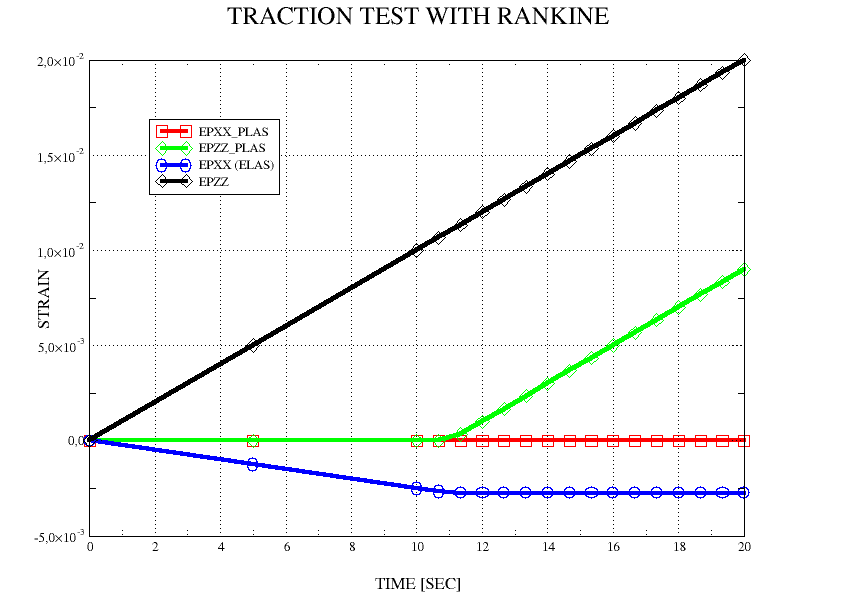
Fig. 669 Evolution des déformations lors de l’essai de traction#
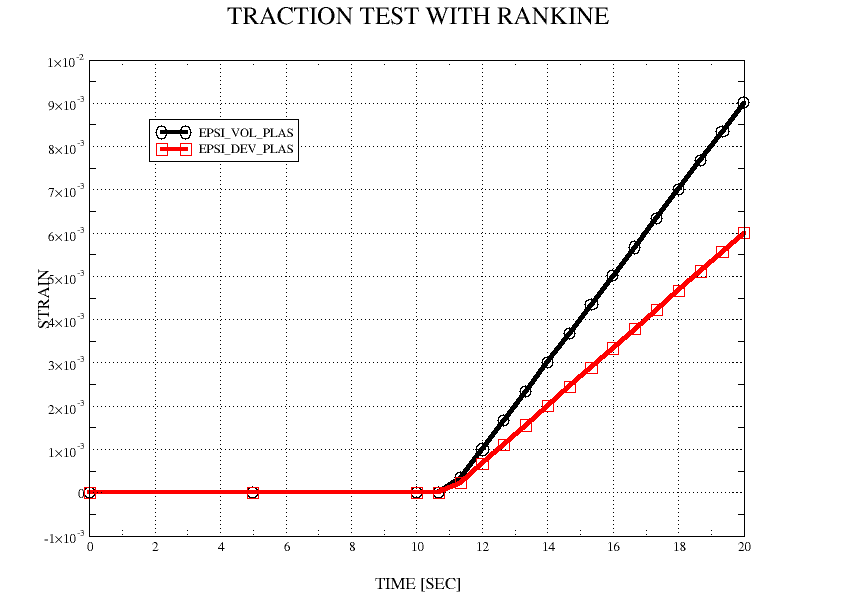
Fig. 670 Evolution des variables internes lors de l’essai de traction#