v5.01.107 SDND107 - Lâcher et excitation sismique d’un système avec amortisseur visqueux non linéaire de type « Zener »#
Résumé:
On teste la réponse du modèle de comportement d’amortisseur visqueux non linéaire DIS_VISC, de type “Zener généralisé”, cf. [R5.03.17].
Le but est de valider la loi visqueuse en dynamique linéaire et non-linéaire. On réalise les tests suivants:
en dynamique linéaire (opérateur DYNA_NON_LINE) dans un cas de lâcher, en utilisant un assemblage d’éléments discrets linéaires comme base de comparaison pour la loi de comportement “Zener généralisé”.
en dynamique non-linéaire (opérateur DYNA_NON_LINE) avec une accélération de type sinusoïdale puis une accélération nulle.
en dynamique non-linéaire transitoire (opérateur DYNA_VIBRA ou DYNA_TRAN_MODAL avec un schéma en temps de type Euler) avec une accélération de type sinusoïdale puis une accélération nulle. C’est la même étude que B. La poursuite est également validée.
D, E) en dynamique non-linéaire transitoire (opérateur DYNA_VIBRA ou DYNA_TRAN_MODAL avec deux schémas en temps de type Runge-Kutta d’ordre 5 et d’ordre 3, à pas adaptatif) avec une accélération de type sinusoïdale puis une accélération nulle. C’est la même étude que B. La poursuite est également validée.
Ce comportement est aussi validé avec la commande STAT_NON_LINE dans SSND101 [V6.08.101].
Solutions de référence#
Méthode de calcul utilisée pour les solutions de référence#
Modélisation A#
Cette modélisation compare un système de discrets (raideurs et amortisseur linéaire, donc \({\alpha}_{3}=1\) ) assemblés en série et en parallèle à un discret affecté de la loi de comportement DIS_VISC. Cette comparaison est réalisée en dynamique transitoire linéaire en simulant un essai de lâcher.
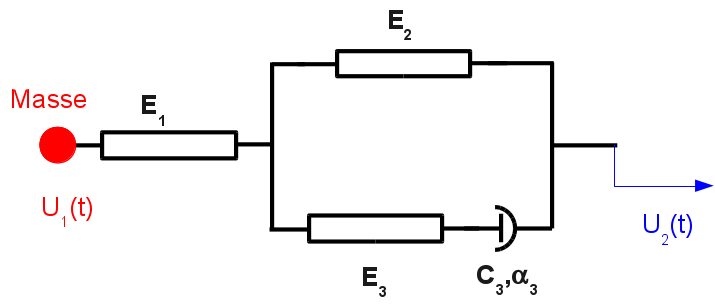
Les équations du système différentiel, qui est d’ordre 3, décrivant la solution analytique sont:
\(\lbrace \begin{array}{c}{F}_{1}=m\ddot{{U}_{1}}\\ {\dot{F}}_{1}.\left(\frac{1}{{E}_{1}}+\frac{1}{{E}_{3}}+\frac{{E}_{2}}{{E}_{1}.{E}_{3}}\right)=\left({\dot{U}}_{2}-{\dot{U}}_{1}\right)\left(1+\frac{{E}_{2}}{{E}_{3}}\right)-\frac{1}{{C}_{3}}.\left({F}_{1}.\left(1+\frac{{E}_{2}}{{E}_{1}}\right)-{E}_{2}.\left({U}_{2}-{U}_{1}\right)\right)\end{array}\) [éq2.1.1-1]
Les conditions initiales sont, avec \({U}_{0}=0,1m\) :
\({\ddot{U}}_{1}(t=0)=0\) \({\dot{U}}_{1}(t=0)=0\) \({U}_{1}(t=0)=0\) \({U}_{2}(t)={U}_{0}.H(t)\mathit{avec}H\mathit{la}\mathit{fonction}\mathit{de}\mathit{Heaviside}\)
L’intégration numérique de ce système différentiel, est obtenue avec la technique des transformées de Laplace:
\({U}_{1}(t)={A}_{s}\exp(-{\lambda}_{\mathit{sc}}t)\sin({\omega}_{t}t)-{A}_{c}\exp(-{\lambda}_{\mathit{sc}}t)\cos({\omega}_{t}t)+{A}_{e}\exp(-{\lambda}_{e}t)+\frac{1}{10}\) [éq2.1.1-2]
\({F}_{1}(t)=-{B}_{s}\exp(-{\lambda}_{\mathit{sc}}t)\sin({\omega}_{t}t)+{B}_{c}\exp(-{\lambda}_{\mathit{sc}}t)\cos({\omega}_{t}t)+{B}_{e}\exp(-{\lambda}_{e}t)\) [éq2.1.1-3]
Avec
\(\begin{array}{ccc}{\omega}_{t}=\frac{14593}{4792}{s}^{-1}& & \\ {A}_{s}=\frac{5516}{214807}& {\lambda}_{\mathit{sc}}=\frac{1573}{2072}{s}^{-1}& {B}_{s}=\frac{5625}{7831}\\ {A}_{c}=\frac{3137}{29305}& & {B}_{c}=\frac{9170}{11289}\\ {A}_{e}=\frac{413}{58610}& {\lambda}_{e}=\frac{38132}{1685}{s}^{-1}& {B}_{e}=\frac{12692}{3517}\end{array}\)
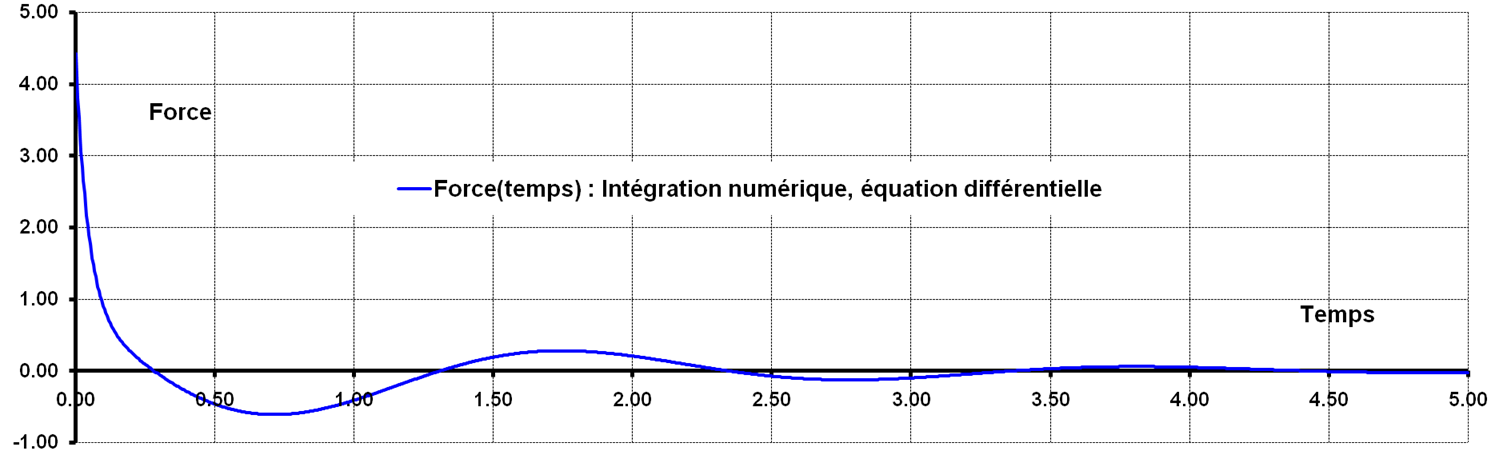
Figure 2.1.1-a : Évolution de l’effort en fonction du temps, modélisation A.
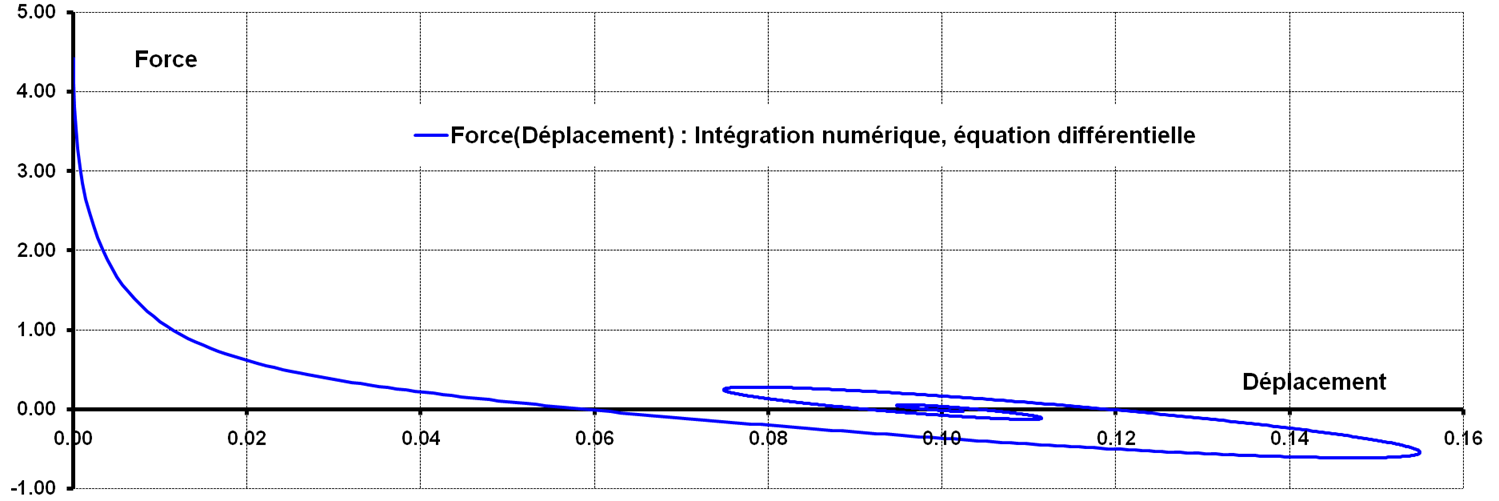
Figure 2.1.1-b : Évolution de l’effort en fonction du déplacement \({U}_{1}\) , modélisation A.
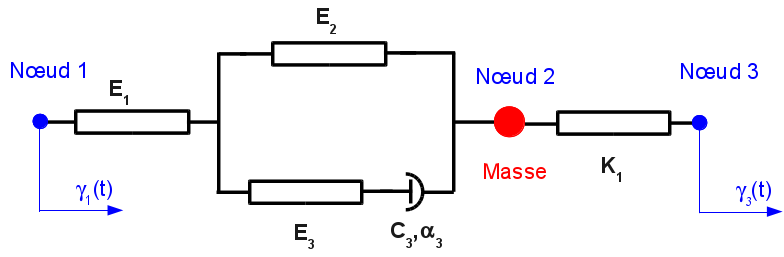
Modélisations B, C, D, E#
Les équations régissant le comportement sont des équations différentielles non linéaires. Pour valider la réponse obtenue avec Code_Aster une intégration par une méthode de Runge-Kutta est réalisée avec un outil externe à Code_Aster .
Les comparaisons sont réalisées sur le déplacement et sur l’effort.
Incertitude sur la solution#
Modélisation A#
Pour la réponse en effort, déplacement:
La solution de référence est obtenue par intégration numérique d’un système différentiel, avec la technique des transformées de Laplace. Il n’y a aucune incertitude, la solution est analytique.
Modélisations B, C, D, E#
Pour la réponse en effort, déplacement:
La solution de référence est obtenue par intégration numérique d’un système différentiel.
Modélisation A#
Caractéristiques de la modélisation#
La modélisation testée est DIS_T sur des mailles SEG2. Les caractéristiques de raideur des discrets sont du type K_T_D_L.
Caractéristiques du maillage#
Nombre de nœuds: 6, nombre de mailles: 5, éléments SEG2: 2.
Conditions aux limites et chargements#
Le test modélise un essai de lâcher, la condition en déplacement est imposé à \({U}_{0}=0.1m\) .
Discrétisation en temps#
Le pas de temps, dans le cadre du schéma de Newmark d’accélération moyenne, et l’intervalle de temps d’analyse sont:
\(\Delta t=4,0{10}^{-3}s\) et \(t\in [:ref:`0s,5s <0s,5s>\)]`
Grandeurs testées et résultats#
Les grandeurs testées sont le déplacement de la masse et l’effort de rappel de la masse. Les expressions des solutions sont données par les équations et .
Les tests sont réalisés sur les extremum des grandeurs. Les tolérances sont celles par défaut.
Instant |
Déplacement |
Force |
0.71200 |
0.14743848131052892 |
-0.61203598667620518 |
0.87600 |
0.15500886072840997 |
-0.54027070148989931 |
1.74400 |
0.07830664477251346 |
0.27967212825227283 |
1.90400 |
0.07486355560127801 |
0.24824092018131852 |
2.77600 |
0.10992022804400776 |
-0.12779697017453923 |
2.93600 |
0.11148618864103731 |
-0.11337010953074489 |
3.80800 |
0.09546355597615262 |
0.05839710629684153 |
3.96800 |
0.09475135206710744 |
0.05177536407974284 |
4.84000 |
0.10207447608212881 |
-0.02668464914494027 |
Modélisations B, C, D, E#
Conditions aux limites et chargements#
La condition en accélération est une fonction du temps:
\({A}_{0}.\sin(2\pi .\mathit{f.t})\) avec \(f=5\mathit{Hz};{A}_{0}=1.0m/{s}^{2}\) pendant 4 périodes soit \(t\in [0,\mathrm{0.8sec}]\)
puis
\(0\) pour \(t\in [\mathrm{0.8sec},\mathrm{3.2sec}]\)
Dans la commande DYNA_NON_LINE le schéma en temps est : pour la modélisation B de type NEWMARK (accélération moyenne).
Dans la commande DYNA_VIBRA le schéma en temps est : pour la modélisation C de type EULER, pour la modélisation D de type RK54, pour la modélisation E de type RK32.
Grandeurs testées et résultats#
Les grandeurs testées sont le déplacement et les efforts.
Les fonctions déplacement et force sont extraites des résultats et soustraites aux fonctions déplacement et force obtenues par une méthode d’intégration du problème externe à Code_Aster . Ces nouvelles fonctions sont normées par la valeur maximale soit des déplacements soit des efforts. La grandeur testée est l’écart maximum.
Ce qui donne pour le déplacement:
\(\mathit{Grandeur}\mathit{testée}=\frac{\mathit{Max}[{\mathit{Depl}}_{\mathit{Externe}}(\mathit{Temps})–{\mathit{Depl}}_{\text{Code\_Aster}}(\mathit{Temps})]}{\mathit{Max}[{\mathit{Depl}}_{\mathit{Externe}}(\mathit{Temps})]}\)
Les tolérances sont celles par défaut.
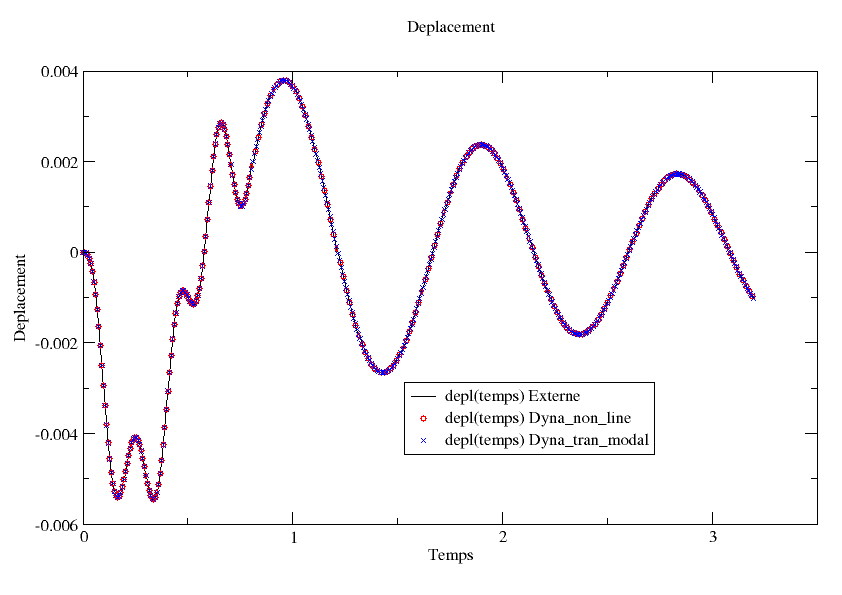
Figure 4.2-a : Réponses (déplacement en fonction du temps) calculées par une méthode externe et par Code_Aster avec les commandes DYNA_NON_LINEet DYNA_VIBRA.
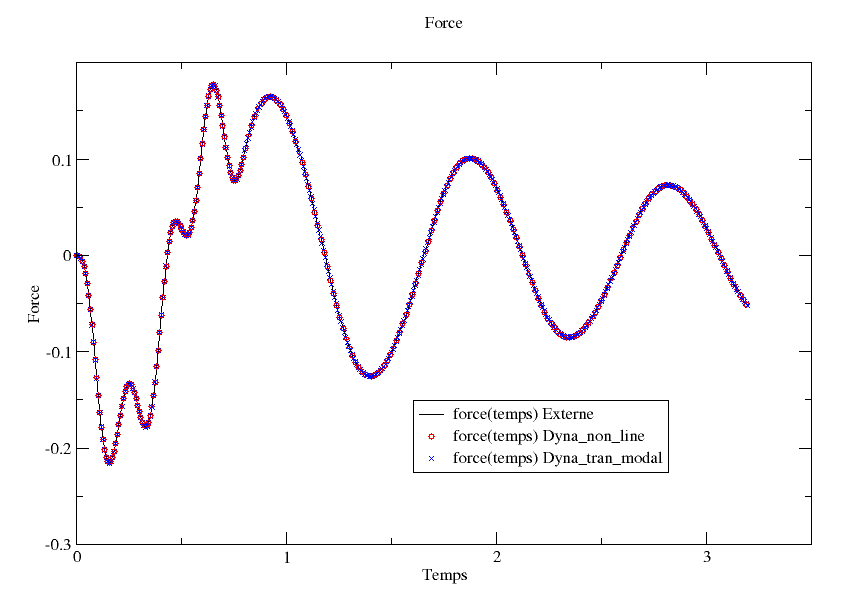
Figure 4.2-b : Réponses (force en fonction du temps), calculées par une méthode externe et par Code_Aster avec les commandes DYNA_NON_LINEet DYNA_VIBRA.
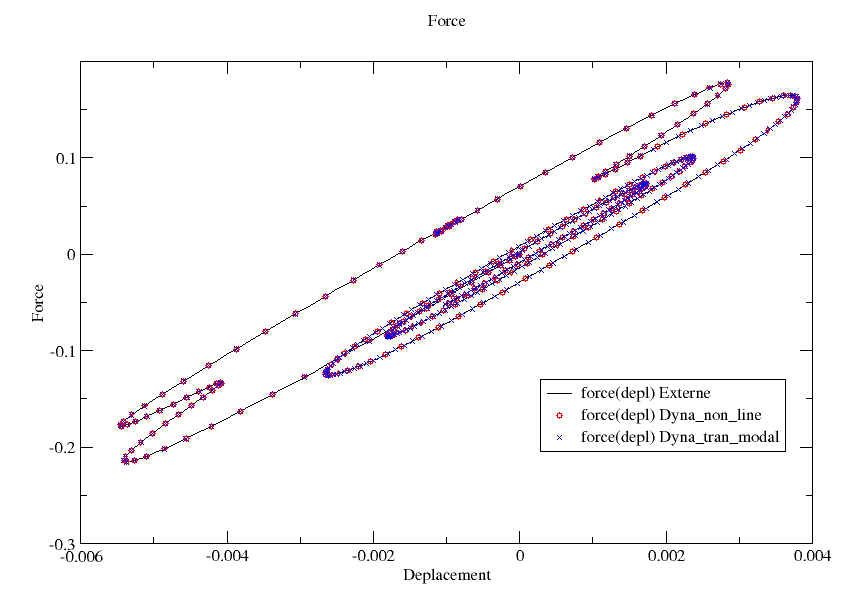
Figure 4.2-c : Réponses (Force en fonction du déplacement), calculées par une méthode externe et par Code_Aster avec les commandes DYNA_NON_LINEet DYNA_VIBRA.
Synthèse des résultats#
Les modélisations A et B vérifient le bon fonctionnement des éléments discrets avec la commande DYNA_NON_LINE.
Les modélisations C, D, E vérifient le bon fonctionnement de la loi DIS_VISC avec les commandes DYNA_VIBRA / DYNA_TRAN_MODAL.
Dans la commande DYNA_NON_LINE le schéma en temps est (modélisation B) : NEWMARK(accélération moyenne).