v6.02.134 SSNL134 - Ruine élasto-plastique du portique de Lee#
Résumé
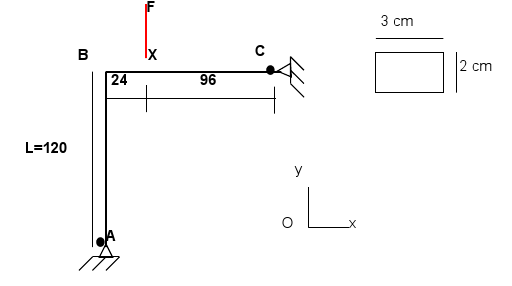
Ce test a pour but de valider simultanément les possibilités non-linéaires matériau et géométrique de l’élément de poutre multi-fibres POU_D_TGM. L’élément est mis en œuvre sur un cas-test couramment traité dans la littérature en ce qui concerne le comportement élastique car il présente une réponse complexe avec des snap-back et des snap-through : c’est le portique de Lee.
On suppose ici un comportement élasto-plastique du portique, ce qui permet de tester la bonne intégration de la loi de comportement des éléments multi-fibres mais aussi le traitement correct des grands déplacements. Les résultats obtenus font l’objet de comparaisons à des résultats issus de la littérature ainsi que de tests de non-régression.
Le cas actuel ne contient qu’une seule modélisation. Néanmoins, dans la synthèse des résultats, une analyse plus poussée des résultats est fournie afin d’aider le lecteur à comprendre la mise en donnée réalisée.
Solution de référence#
Méthode utilisée pour le calcul de la solution de référence#
Ce portique a été étudié pour la première fois en 1968 par Lee [bib1], qui a proposé une solution analytique dans le cas élastique et en négligeant l’énergie de déformation due à l’effort normal. Depuis, plusieurs autres auteurs ont à leur tour étudié la structure, en particulier en 1984, Cichon [bib2] fût le premier à proposer une solution en considérant un comportement élasto-plastique.
Résultats de référence#
On s’intéresse aux déplacements horizontaux et verticaux dans le repère global du point \(X\) pour différentes valeurs de la force appliquée.
On présente ci-dessous un tableau récapitulatif des résultats obtenus par Cichon ainsi que par Waszczyszyn et Janus-Michalska [bib3]. On choisit comme référence la moyenne de ces deux résultats figurée en gras .
Déplacement (\(\mathrm{cm}\)) |
\(U\) (horizontal) |
\(V\) (vertical) |
||||
\(F(N)\) |
Waszczyszyn |
Cichon |
Moyenne |
Waszczyszyn |
Cichon |
Moyenne |
0,968 |
1,812 |
1,734 |
1,773 |
10,414 |
10,078 |
10,246 |
1,242 |
3,482 |
3,913 |
3,6975 |
15,61 |
16,639 |
16,1245 |
1,4153 |
6,281 |
6,711 |
6,496 |
22,305 |
23,344 |
22,8245 |
1,507 |
12,516 |
13,836 |
13,176 |
38,804 |
36,501 |
37,6525 |
1,4605 |
19,025 |
18,148 |
18,5865 |
44,18 |
42,543 |
43,3615 |
1,4006 |
23,104 |
23,073 |
23,0885 |
49,262 |
47,374 |
48,318 |
1,3151 |
28,998 |
28,303 |
28,6505 |
53,012 |
51,102 |
52,057 |
1,1062 |
39,266 |
37,765 |
38,5155 |
58,904 |
56,181 |
57,5425 |
0,9275 |
46,871 |
44,831 |
45,851 |
61,775 |
58,442 |
60,1085 |
Incertitude sur la solution#
Entre 1 et 5% (écart relatif maximal à la moyenne des résultats).
Références bibliographiques#
Lee S., Manuel F. S., and Rossow E. C. “Large deflections and stability of elastic frames.” J. Engrg. Mech. Div., ASCE , 1968;EM2, 521-547.
Cichon Cz. “Large displacements in-plane analysis of elasto-plastic frames”. Comp Struct 1984;19,737-45.
Waszczyszyn Z., Janus-Michalska M. “Numerical approach to the “exact’finite element analysis of in-plane finite displacements of framed structures”. Comput. Struct . 1998;69, 525-535.
Modélisation A#
Caractéristiques de la modélisation#
Modélisation POU_D_TGM
Découpage: 10 éléments dans le poteau et dans la poutre
Caractéristiques du maillage#
Nombre de nœuds: 21
Nombre de mailles et types: 20 SEG2
Caractéristiques du maillage de la section transverse#
Nombre de fibres: 100 (découpage en 10 de chaque côté)
Nombre de mailles et types: 100 QUAD4
Grandeurs testées et résultats#
Les résultats sont obtenus avec une mise en données sans découpe automatique du pas de temps. On effectue un pilotage par longueur d’arc (TYPE=LONG_ARC),
avec un choix de racine fondé sur l’angle (SELECTION="ANGL_INCR_DEPL). Dans notre cas, le coefficient multiplicatif nécessaire au pilotage est fixé à 1
(COEFF_MUT=1). Le pilotage ne porte que sur le nœud auquel la force est appliquée (PX), mais porte sur les deux composantes du déplacement:
GROUP_NO="PX"
NOM_CMP=("DX", "DY").
Déplacement |
Identification |
Référence |
Type de référence |
Tolérance |
0.960 |
DY |
0,968 |
“SOURCE_EXTERNE” |
5 % |
1.214 |
DY |
1,242 |
“SOURCE_EXTERNE” |
5 % |
1.406 |
DY |
1,4153 |
“SOURCE_EXTERNE” |
5 % |
1.491 |
DY |
1,507 |
“SOURCE_EXTERNE” |
5 % |
1.465 |
DY |
1,4605 |
“SOURCE_EXTERNE” |
5 % |
1.414 |
DY |
1,4006 |
“SOURCE_EXTERNE” |
5 % |
1.321 |
DY |
1,3151 |
“SOURCE_EXTERNE” |
5 % |
0.890 |
DY |
1,1062 |
“SOURCE_EXTERNE” |
20 % |
0.278 |
DY |
0,9275 |
“SOURCE_EXTERNE” |
75 % |
Déplacement |
Identification |
Référence |
Type de référence |
Tolérance |
0.897 |
DX |
0,968 |
“SOURCE_EXTERNE” |
8 % |
1.171 |
DX |
1,242 |
“SOURCE_EXTERNE” |
8 % |
1.381 |
DX |
1,415 |
“SOURCE_EXTERNE” |
8 % |
1.496 |
DX |
1,507 |
“SOURCE_EXTERNE” |
8 % |
1.471 |
DX |
1,4605 |
“SOURCE_EXTERNE” |
8 % |
1.431 |
DX |
1,4006 |
“SOURCE_EXTERNE” |
8 % |
1.356 |
DX |
1,3151 |
“SOURCE_EXTERNE” |
8 % |
1.150 |
DX |
1,1062 |
“SOURCE_EXTERNE” |
8 % |
0.965 |
DX |
0,9275 |
“SOURCE_EXTERNE” |
8 % |
Remarques#
L’utilisation de la technique de longueur d’arc rend difficile la définition de la valeur de référence à introduire dans la commande TEST_RESU, puisque ces valeurs ne peuvent pas être imposées.
Par conséquent, nous avons pris comme valeur testée la valeur du chargement, qui correspond à ETA_PILOTAGE. Pour une valeur de chargement choisie,
on compare alors les valeurs des déplacements entre les résultats de la littérature et ceux obtenus ici.
Les différentes tolérances ont été choisies de la sorte en lien avec la discrétisation (en pas de temps) utilisée. Cette dernière a été choisie pour ne pas que le calcul
soit « trop long » (en termes de temps de calcul). Une diminution du pas de temps entraînerait une diminution des tolérances nécessaires (voir la synthèse pour plus de détails).
Le pas utilisé pour la définition de la liste d’instant vaut 2 pour un temps final valant 179.
Ces choix ont été réalisés afin de disposer d’une représentation suffisamment bonne de la courbe d’équilibre.
Nous notons tout de même une différence élevée des résultats en \(\mathit{DY}\) aux derniers instants, bien que les courbes de réponse aient des formes similaires.
Synthèse des résultats#
La synthèse des résultats se présente comme suit : dans un premier temps, nous explicitons l’origine du paramétrage utilisé dans la Modélisation A, puis nous comparons les résultats aux références de la littérature.
Explications de la mise en donnée et choix des paramètres pour la modélisation A#
Rappel sur les choix de la mise en donnée#
La mise en donnée réalisée se fonde sur un seul appel à l’opérateur de résolution (STAT_NON_LINE ici), et avec un pas fixé utilisé pour la définition de la liste d’instants.
Nous avons fait par ailleurs le choix de considérer des pas pour lequel aucun sous-découpage est nécessaire à la convergence de l’algorithme. Dans l’ensemble des courbes
présentées ici, les déplacements tracés sont les déplacements du nœud PX.
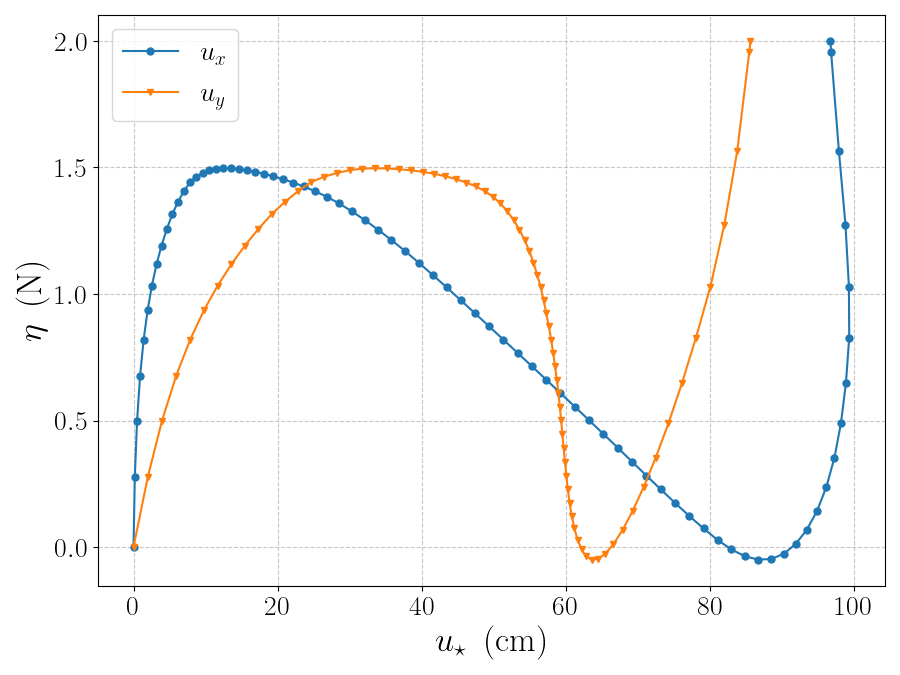
Fig. 631 Courbe d’équilibre (élasto-plastique) pour le pas de discrétisation le plus grossier et pour un pilotage sur le point ``PX``#
Remarques sur la variation de la réponse en lien avec les grandes déformations#
Nous effectuons ici quelques remarques pour expliquer la mise en donnée choisie, et aider à la compréhension des résultats.
|
|
Premièrement, nous notons que le modèle élasto-plastique est bien nécessaire, car l’effet de la plasticité est bien marqué pour le chargement étudié. Pour visualiser ceci, on fournit dans la suite une représentation des courbes d’équilibre dans des cas
élasto-plastiques et élastiques. On remarque sur la figure ci-dessus, que dès que \(\eta > 1.5\), l’effet de la plasticité est notable sur les courbes d’équilibre (au point considéré ici,
donc PX).
|
|
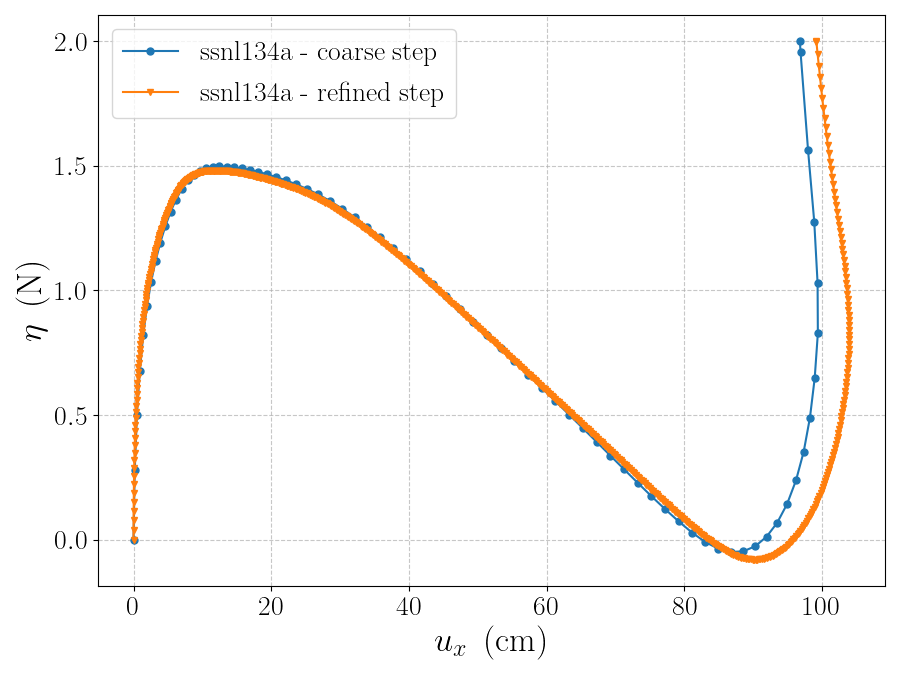
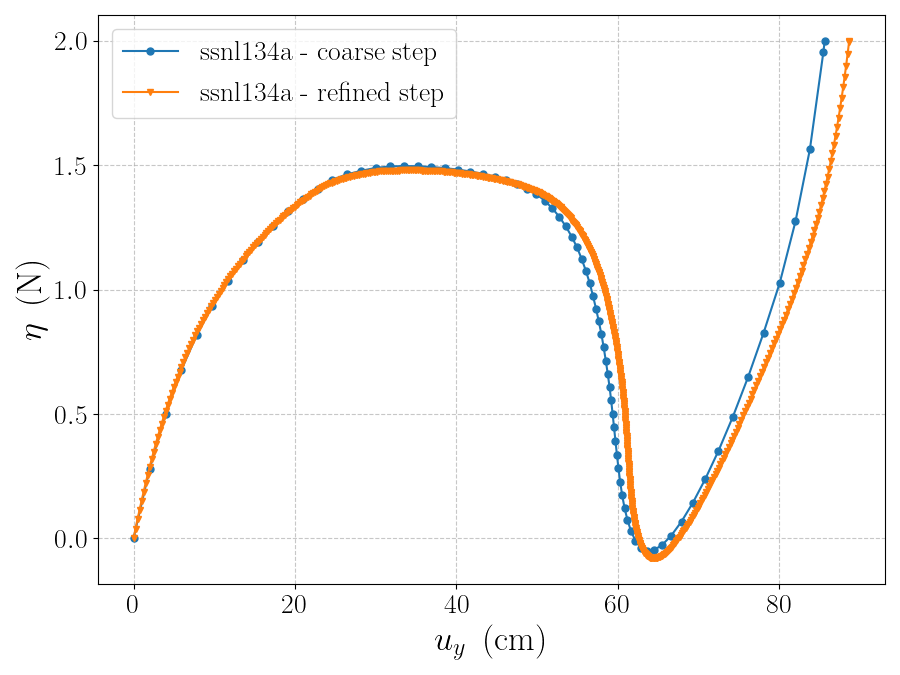
Dans la Modélisation A, nous avons considéré un pas de discrétisation de la liste d’instants.
On peut observer que pour des pas trop grossiers, une variation du pas (instants de calculs) implique une variation de la courbe d’équilibre de la structure.
Ceci est lié à l’intégration du comportement (grandes déformations) au sein des poutres POU_D_TGM. La différence entre les deux réponses (pas grossier et fin)
est fourni dans la figure ci-dessus. On rapelle que le comportement prend en compte des grandes déformations et de l’élasto-plasticité.
|
|
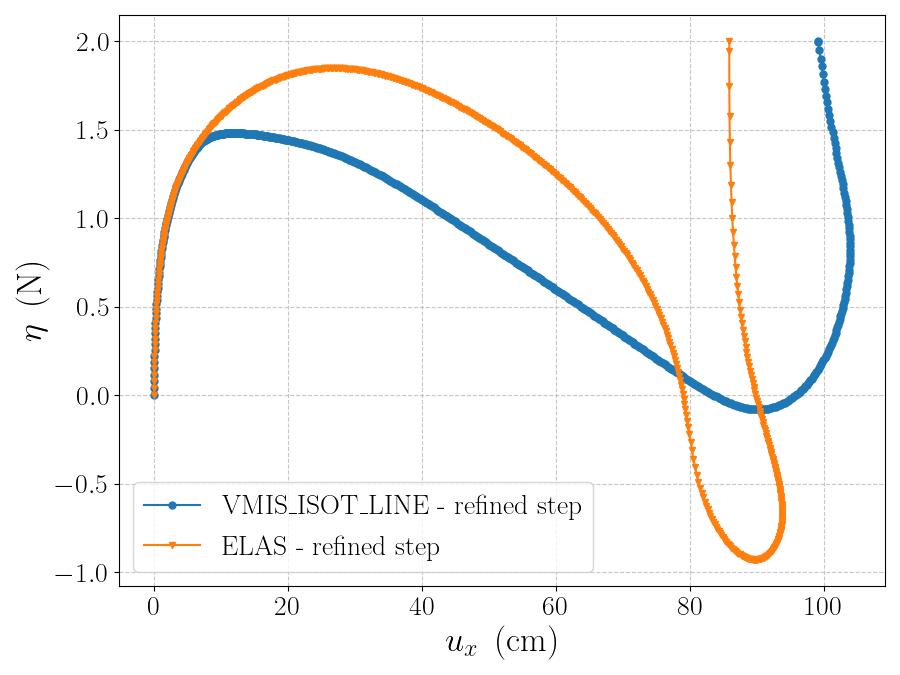
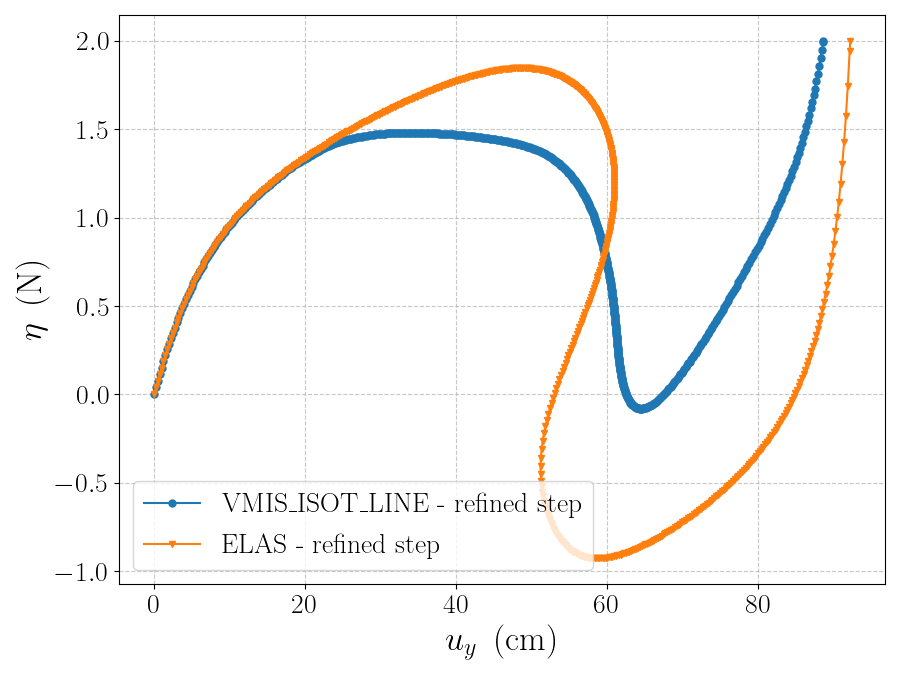
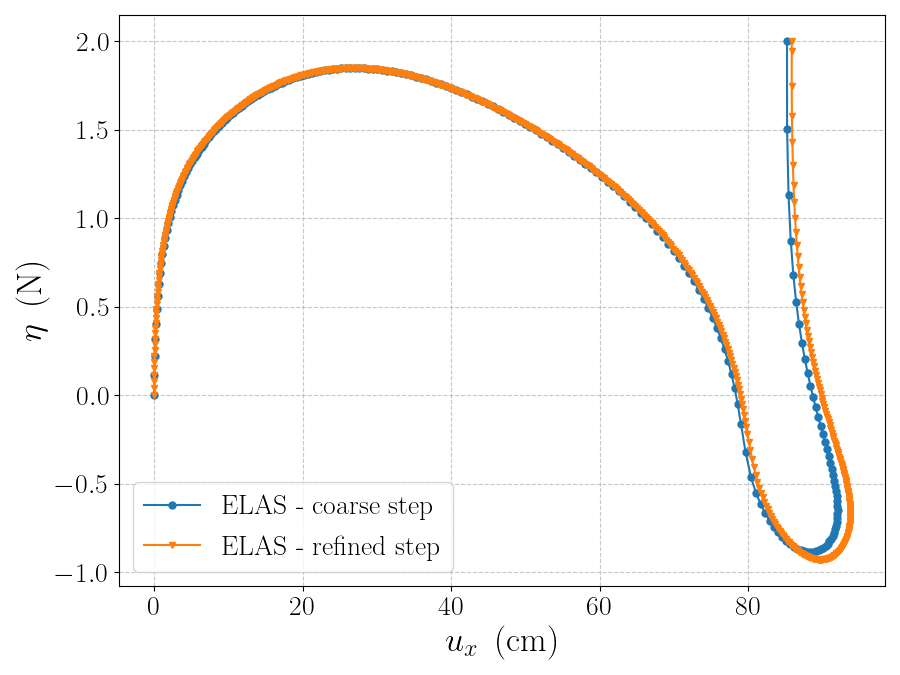
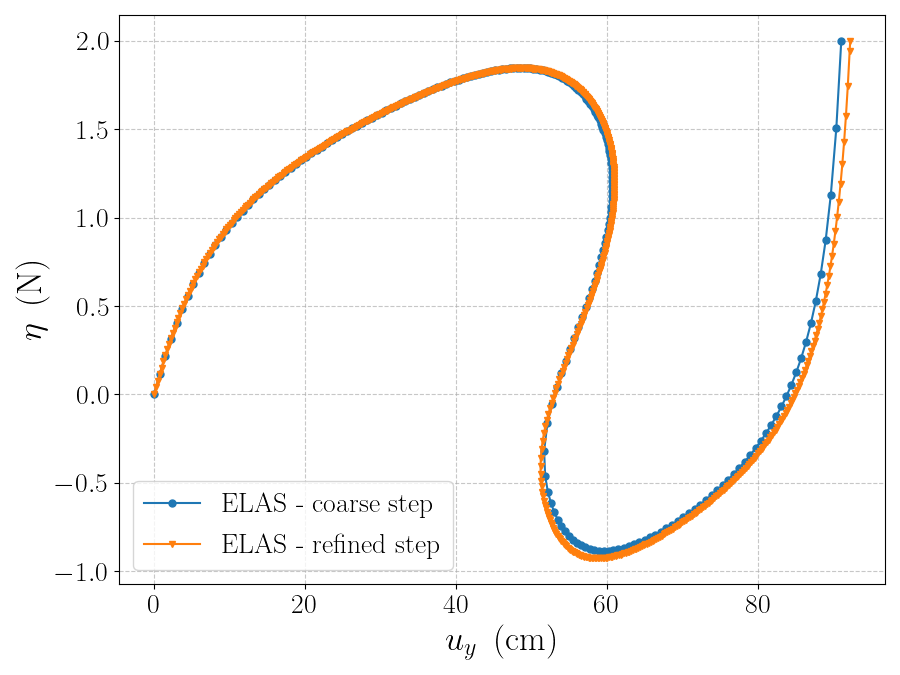
Néanmoins, la différence entre les solutions (courbes d’équilibre, donc chemin de chargement) n’est pas uniquement liée à la plasticité. En effet, comme l’illustrent les figures suivantes (générées pour le pas le plus fin), on retrouve une différence entre les courbes d’équilibre lorsqu’on considère un comportement élastique. Il est à noter que les pas utilisés pour disposer d’une convergence (sans sous-découpe) diffèrent entre les cas élastiques et élasto-plastiques. Il est nécessaire de disposer d’un pas plus petit dans le cas élastique afin que le calcul converge.
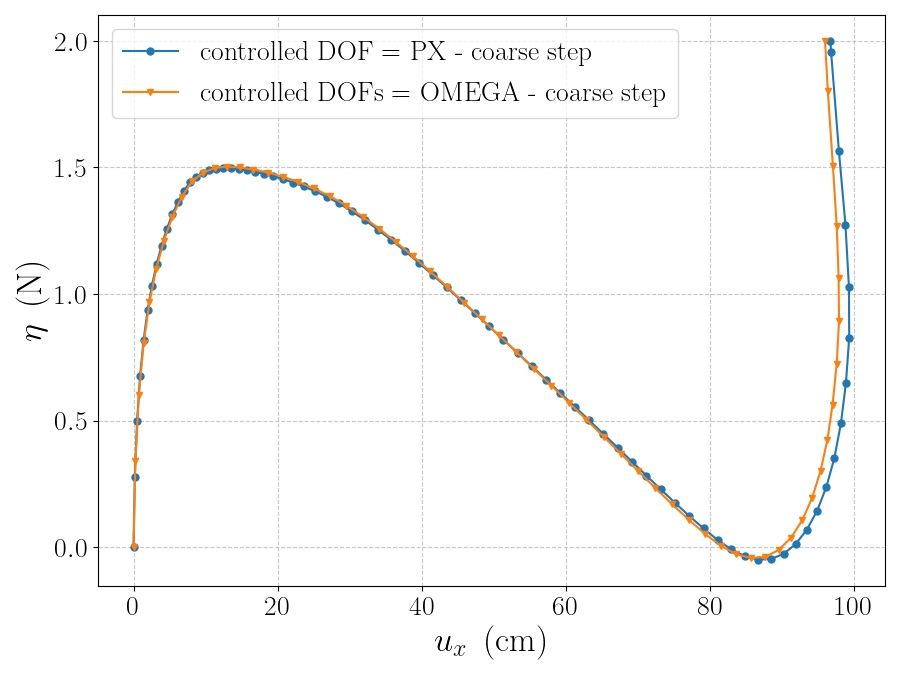
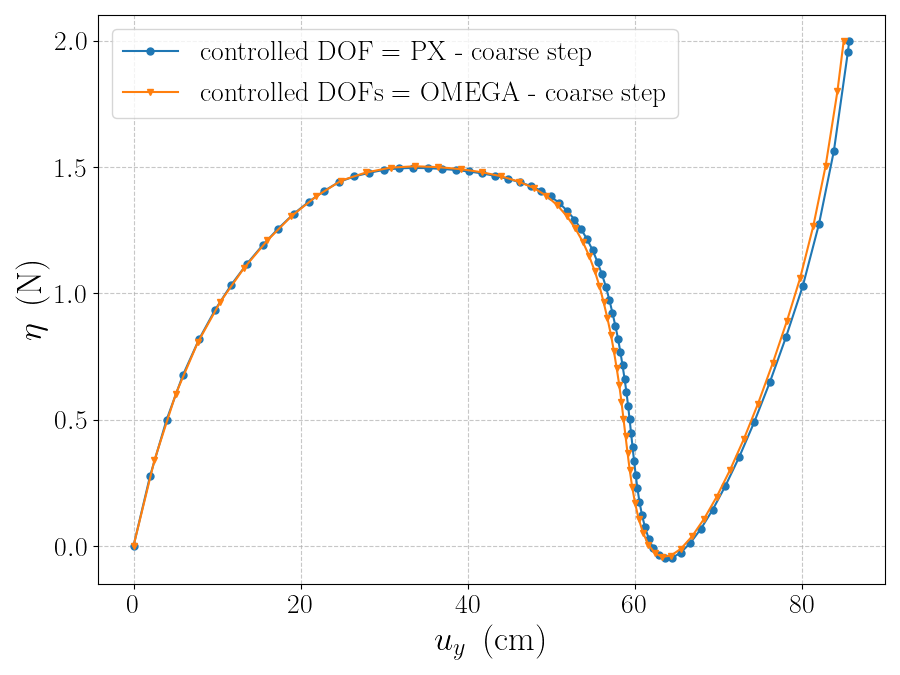
Comparaison des résultats en fonction des degrés de liberté concernés par le pilotage#
Nous avons fait le choix de ne piloter que sur le nœud où le chargement est appliqué.
En effet, un groupe de mailles doit être choisi afin d’effectuer le pilotage. La norme de l’incrément de déplacement peut-être calculée sur
un seul nœud piloté (le point d’application de la force, ici 'PX') ou sur l’ensemble des nœuds du système (GROUP_MA = 'OMEGA').
Les courbes de réponses sont similaires entre les deux (voir figures suivantes).
La légère différence dans les réponses est liée à l’intégration du comportement comme expliqué plus haut.
|
|
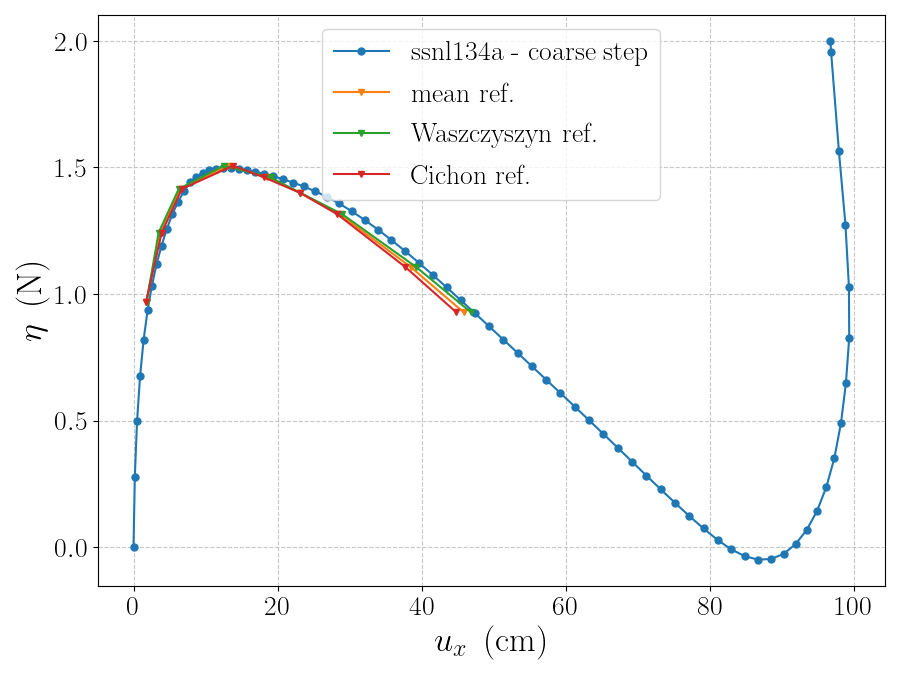
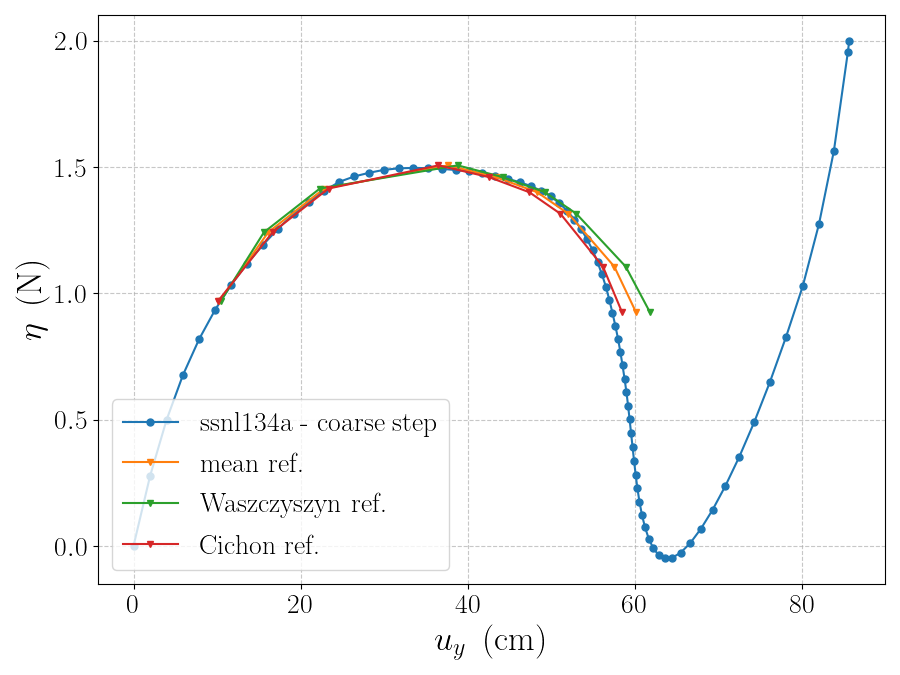
Comparaison des résultats à la littérature#
Nous représentons ici la réponse du portique de Lee, et la comparaison avec les points de référence. Les courbes se superposent, avec une différence
pour les derniers points de la réponse en DY. Comme illustré plus haut, cette différence se réduit fortement lorsque le pas de discrétisation choisi
est plus petit.
|
|
De plus, un groupe de mailles doit être choisi afin d’effectuer le pilotage. La norme de l’incrément de déplacement peut-être calculée sur
un seul nœud piloté (le point d’application de la force, ici 'PX') ou sur l’ensemble des nœuds du système (GROUP_MA = 'OMEGA').
Les réponses sont similaires dans les deux cas.
Synthèse#
L’erreur commise sur les déplacements reste pour la majorité des points du même ordre de grandeur que l’incertitude sur la solution (5 %). Il est par ailleurs possible de diminuer cette erreur en raffinant la discrétisation « temporelle » (liste d’instants). Globalement, on observe une bonne corrélation avec la courbe de réponse de la référence. On décrit notamment bien le changement d’allure due à la première plastification.