u4.42.06 Opérateur DEFI_GLRC#
Syntaxe#
Détail de la syntaxe
mater = DEFI_GLRC(
◇ reuse = <objet de BETON ou NAPPE ou CABLE_PREC ou LINER/MATER>,
◇ RELATION = / "GLRC_DAMAGE" (par défaut),
/ "GLRC_DM",
◇ ALPHA = float,
◇ INFO = / 1 (par défaut),
/ 2,
# Si: equal_to("RELATION", 'GLRC_DM')
◆ BETON = _F(
◆ MATER = mater,
◆ EPAIS = float,
),
◆ NAPPE = _F(
◆ MATER = mater,
◆ OMY = float,
◆ OMX = float,
◆ RY = float,
◆ RX = float,
),
◇ RHO = float,
◇ AMOR_ALPHA = float,
◇ AMOR_BETA = float,
◇ AMOR_HYST = float,
◆ PENTE = _F(
◇ TRACTION = / "PLAS_ACIER",
/ "RIGI_ACIER" (par défaut),
/ "UTIL",
# Si: equal_to("TRACTION", 'UTIL')
◇ EPSI_MEMB = float (défaut: 0.0),
◇ FLEXION = / "PLAS_ACIER",
/ "RIGI_ACIER",
/ "RIGI_INIT" (par défaut),
/ "UTIL",
# Si: equal_to("FLEXION", 'UTIL')
◆ KAPPA_FLEX = float,
),
◇ CISAIL = / "NON" (par défaut),
/ "OUI",
# Si: equal_to("RELATION", 'GLRC_DAMAGE')
◇ CISAIL_NL = _F(
◆ BTD1 = float,
◆ BTD2 = float,
◆ TSD = float,
),
◆ BETON = _F(
◆ MATER = mater,
◆ EPAIS = float,
◆ GAMMA = float,
◆ QP1 = float,
◆ QP2 = float,
◆ C1N1 = float,
◆ C1N2 = float,
◆ C1N3 = float,
◆ C2N1 = float,
◆ C2N2 = float,
◆ C2N3 = float,
◆ C1M1 = float,
◆ C1M2 = float,
◆ C1M3 = float,
◆ C2M1 = float,
◆ C2M2 = float,
◆ C2M3 = float,
◇ & OMT = float,
& EAT = float,
◇ & BT1 = float,
& BT2 = float,
◇ & MP1X = float,
& MP1Y = float,
& MP2X = float,
& MP2Y = float,
◇ & MP1X_FO = fonction,
& MP1Y_FO = fonction,
& MP2X_FO = fonction,
& MP2Y_FO = fonction,
),
◆ NAPPE = _F(
◆ MATER = mater,
◆ OMX = float,
◆ OMY = float,
◆ RX = float,
◆ RY = float,
),
◇ CABLE_PREC = _F(
◆ MATER = mater,
◆ OMX = float,
◆ OMY = float,
◆ RX = float,
◆ RY = float,
◆ PREX = float,
◆ PREY = float,
),
◇ LINER = _F(
◆ MATER = mater,
◆ OML = float,
◆ RLR = float,
),
)
◆ : obligatoire
◇ : optionnel
⟐ : présent par défaut
& : ensemble
/ : un seul parmi
| : plusieurs choix possibles
Description générale de la coque en béton armé#
On décrit dans ce paragraphe la géométrie de la coque considérée.
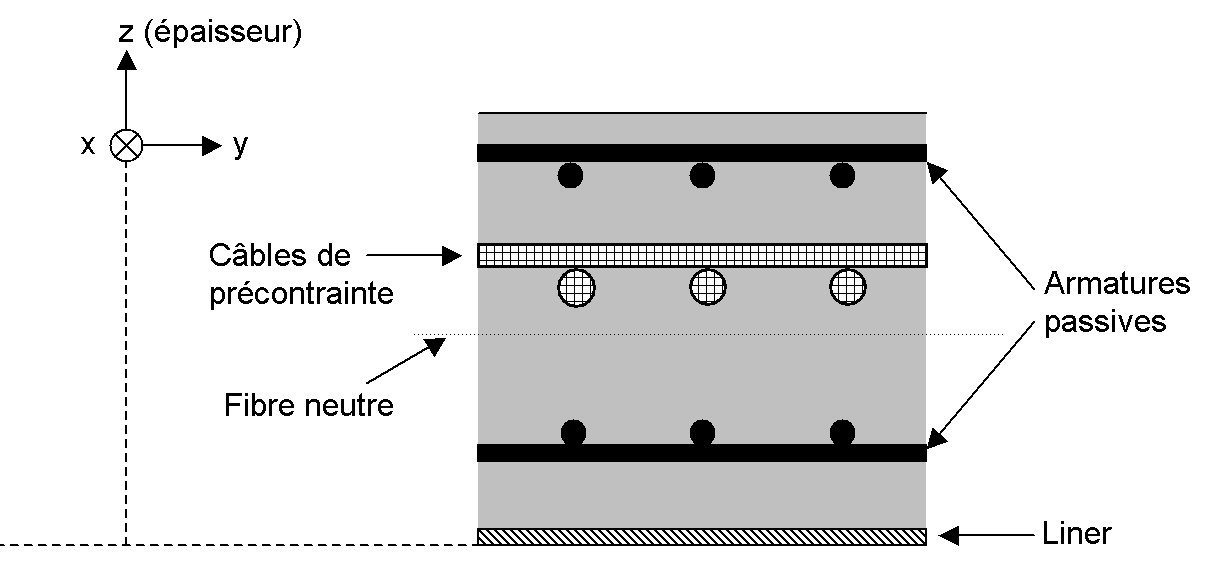
Figure 3-a : Section courante de la coque en béton armé.
La section de base d’une dalle en béton armé () est composée :
de la coque en béton
des armatures passives
et dans le cas de GLRC_DAMAGE, la section peut contenir en plus:
des câbles de précontrainte
un liner métallique
Le liner est une plaque en acier placée en peau interne de l’enceinte garantissant notamment l’étanchéité en cas de fuite accidentelle.
La précontrainte permet de comprimer le béton de la structure de génie civil. Cette précontrainte est appliquée à l’aide de câbles de précontrainte en acier mis sous tension.
Opérandes RELATION = GLRC_DM#
On consultera la documentation du modèle GLRC_DM [R7.01.32].
Mot clé BETON#
Le mot clé facteur BETON permet de définir les caractéristiques géométriques et matériau du béton.
Opérande MATER#
MATER = mat_beton
Définit le nom du matériau produit obligatoirement par DEFI_MATER_GC/BETON_GLRC utilisé pour le béton. Cet opérande permet de vérifier que les paramètres associés aux comportements du béton existent bien dans le matériau.
Opérande EPAIS#
EPAIS = ep
Définit l’épaisseur de la plaque de béton. On vérifie que \(\mathit{ep}\ge 0\) .
Remarque :
La valeur de cette épaisseur doit être identique à celle donnée dans AFFE_CARA_ELEM pour les éléments de coque utilisant le matériau mat_beton (défini par DEFI_GLRC).
Mot clé NAPPE#
Le mot clé facteur NAPPE permet de définir les caractéristiques géométriques et matériau des armatures passives. Ce mot clé peut être défini seulement une seule fois. En effet, sous l’hypothèse d’isotropie en élasticité de la loi de comportement GLRC_DM, toutes les armatures sont nécessairement identiques et à équidistance de la fibre neutre.
Opérande MATER#
MATER = mat_acier
Définit le nom du matériau produit obligatoirement par DEFI_MATE_GC/ACIER utilisé pour les armatures passives.
Cet opérande permet de récupérer les paramètres matériau utilisés pour les armatures passives (module d’Young \({E}_{a}\) , coefficient de Poisson \({\nu}_{a}\) et limite élastique \({\sigma}_{\mathrm{ya}}\) ).
Opérandes OMX et OMY#
OMX = Wx
OMY = Wy
Définissent les sections d’acier \({\Omega}_{x}\) et \({\Omega}_{y}\) d’un quelconque des deux lits d’armatures donné suivant les directions \(x\) et \(y\) (en \({m}^{2}/m\) linéaire si l’épaisseur est donnée en \(m\) ). On rappelle que la formulation du modèle GLRC_DM impose que les deux nappes d’armatures soient identiques.
On vérifie que \({\Omega}_{x}>0\) et \({\Omega}_{x}={\Omega}_{y}\) .Avec les deux nappes d’armatures dans la section de béton armé, on aura donc un taux de ferraillage total égal à \(2{\Omega}_{x}=2{\Omega}_{y}\) .
Opérandes RX et RY#
RX = rx
RY = ry
Définissent la position adimensionnée d’un lit d’armatures par rapport à l’épaisseur de la coque en béton, donnée dans les directions \(x\) et \(y\) (\(-1\le \mathit{rx}\le 1\) , \(-1\le \mathit{ry}\le 1\) , ).
On vérifie que \(\mathit{rx}=\mathit{ry}\) .
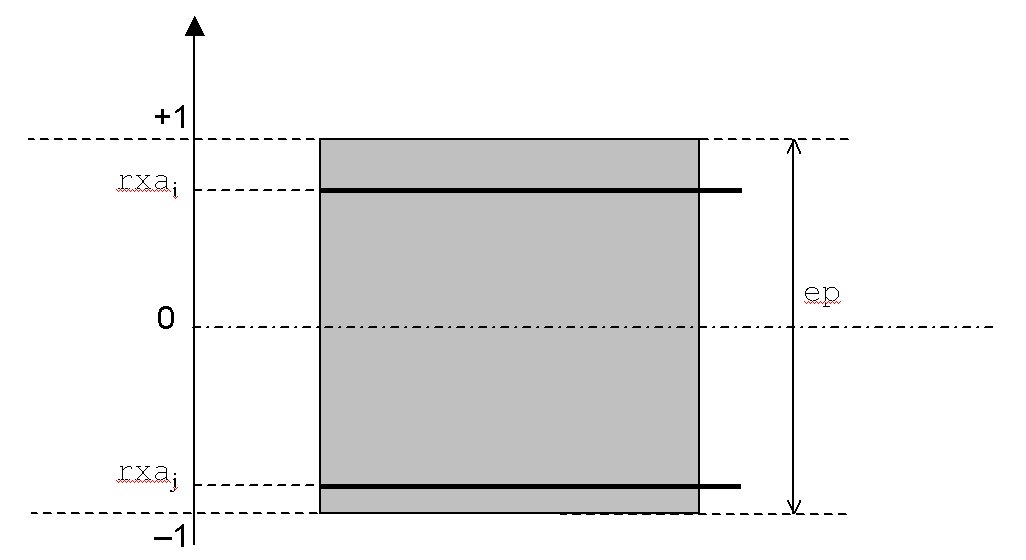
Figure 4.2.3-a : D éfinition de la position adimensionnée des lits d’armatures.
Opérande RHO#
RHO = rho
Opérande facultatif permettant à l’utilisateur de définir la masse volumique équivalente de la dalle en béton armé. Dans le cas où l’opérande n’est pas défini, la masse volumique est calculée de la manière suivante:
\({\rho}_{\mathit{eq}}={\rho}_{b}+\frac{{\rho}_{a}}{h}({\Omega}_{x}^{\sup}+{\Omega}_{x}^{\inf}+{\Omega}_{y}^{\sup}+{\Omega}_{y}^{\inf})\)
Où \({\rho}_{a}\) désigne la masse volumique de l’acier et est récupérée dans le concept mat_acier fourni par l’opérande MATER du mot clé NAPPE.
Où \({\rho}_{b}\) désigne la masse volumique du béton et est récupérée dans le concept mat_betonfourni par l’opérande MATER du mot clé BETON .
Où \(h\) est l’épaisseur fournie par le mot clé EPAIS.
Opérandes AMOR_ALPHA,AMOR_BETA et AMOR_HYST#
AMOR_ALPHA = amor_alpha
AMOR_BETA = amor_beta
AMOR_HYST = amor_hyst
Opérande facultatif permettant à l’utilisateur de définir les coefficients \(\alpha\) et \(\beta\) qui servent à construire la matrice de l’amortissement de Rayleigh et \(\eta\) pour l’amortissement hystérétique.
\(C=\alpha K+\beta M\)
On se reportera aux documents de modélisation de l’amortissement mécanique [U2.06.03] et [R5.05.04].
Si les opérandes ne sont pas renseignées dans la commande, elles prennent les valeurs définies dans le concept mat_beton fourni par l’opérande MATER du mot clé BETON.
Mot clé facteur PENTE#
Opérande TRACTION#
◊ TRACTION = / RIGI_ACIER [DEFAUT]
/ PLAS_ACIER / UTIL
Le mot clé TRACTION permet de définir la méthode de calcul de la pente post-élastique. En effet, il est possible de réaliser ce calcul suivant trois méthodes dénommées RIGI_ACIER, PLAS_ACIER et UTIL. Ces trois calculs de pentes permettent de mettre en place trois méthodes de recalage différentes en fonction des propriétés matériaux renseignées pour la traction. Dans le cas où la limite élastique des aciers n’est pas connue, les méthodes de recalage RIGI_ACIER, i.e. pente post-élastique égale à la pente de reprise de raideur des aciers, et UTIL, i.e. pente post-élastique coupe la pente de reprise de raideur des aciers à une déformation maximale dont la valeur est imposée par l’utilisateur, sont accessibles (cette méthode n’est pas adaptée pour des déformations maximales plus faibles que le creux de la courbe de référence, voir ). Dans le cas où la limite d’élasticité des aciers est connue, il est possible d’utiliser la méthode de recalage à la limite de plasticité des aciers (PLAS_ACIER). Les différentes méthodes de recalage sont illustrées par les figures qui suivent.

Figure 4.5.1-a: Courbe de traction (GLRC_DM vs Référence) Recalage PENTE = RIGI_ACIER

Figure 4.5.1-b: Courbe de traction (GLRC_DM vs Référence) Recalage PENTE = UTIL

Figure 4.5.1-c: Courbe de traction (GLRC_DM vs Référence) Recalage PENTE = PLAS_ACIER
Dans le cas du recalage à la déformation maximale (TRACTION=UTIL), il est nécessaire de renseigner la déformation maximale en membrane (EPSI_MEMB).
Opérande FLEXION#
◊ FLEXION = / RIGI_INIT [DEFAUT]
/ RIGI_ACIER
/ PLAS_ACIER
/ UTIL
Le mot clé FLEXION permet de définir la méthode de calcul de la pente post-élastique. En effet, il est possible de réaliser ce calcul suivant deux méthodes dénommées RIGI_INIT, RIGI_ACIER, PLAS_ACIER et UTIL.
Les options RIGI_ACIER et PLAS_ACIER correspondent aux paramétrages exposés pour la flexion au 4.5.1 , transposés au cas de la flexion.
Dans le cas de l’option RIGI_INIT, l’approximation bilinéaire de réponse en flexion de la section est déterminée de la manière suivante (cf [R7.01.32]):
le seuil d’élasticité est fixé pour une valeur M qui s’écarte de 5% de la courbe théorique;
la deuxième pente est définie afin que la loi bilinéaire soit tangente à la courbe théorique.
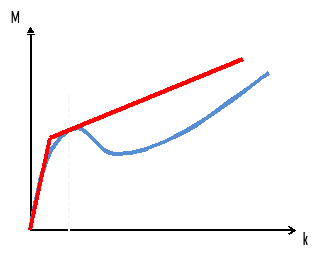
Figure 4.5.2-a: Courbe de flexion (GLRC_DM vs Référence) Recalage PENTE = RIGI_INIT
Dans le cas de l’option UTIL, l’approximation bilinéaire de réponse en flexion de la section est déterminée de façon à diminuer l’aire relative par rapport à la réponse théorique de la section jusqu’à la courbure kf (KAPPA_FLEX) . (cf [R7.01.32])
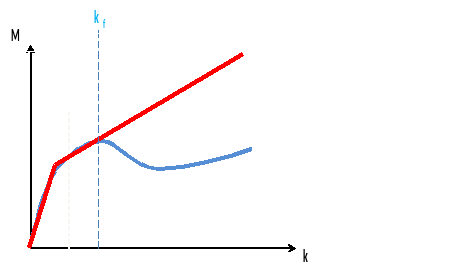
Figure 4.5.2-b: Courbe de flexion (GLRC_DM vs Référence) Recalage PENTE = UTIL
Opérande EPSI_MEMB#
EPSI_MEMB = em
Définit la valeur de la déformation maximale en membrane dans le cas TRACTION=UTIL.
Opérande KAPPA_FLEX#
KAPPA_FLEX = kf
Définit la valeur de la courbure maximale en flexion (inverse d’une longueur) dans le cas FLEXION=UTIL.
Mot clé CISAIL#
Le mot clé simple CISAIL permet de définir si les paramètres élastiques homogénéisés sont ceux calculés par homogénéisation pour une application standard du modèle de comportement (CISAIL=NON) ou ceux calculés pour une application particulière afin de respecter le fait quand on est en cisaillement plan pur la rigidité des aciers n’intervient pas dans le comportement élastique (CISAIL=OUI).
Mot clé INFO#
Avec INFO = 2, on obtient l’Impression au format RESULTAT de la liste des paramètres homogénéisés utilisés en entrée du modèle de comportement GLRC_DM: élasticité, seuils et comportement endommageant.
Exemple d’utilisation#
On pourra consulter l’exemple d’utilisation reporté dans le test SSNS106A, en situation de traction-compression, et dans le test SSNS106B, en situation de flexion alternée, cf. [V6.05.106]. Il peut être utilisé afin de vérifier sur le cas à étudier les conséquences en termes de réponse pour des chargements élémentaires en statique alternée du choix des paramètres et des méthodes d’identification.
Opérandes RELATION = GLRC_DAMAGE#
On consultera la documentation du modèle GLRC_DAMAGE [R7.01.31].
Mot clé BETON#
Le mot clé facteur BETON permet de définir les caractéristiques géométriques et matériau du béton.
Opérande MATER#
MATER = mat_beton
Définit le nom du matériau produit par DEFI_MATERIAU utilisé pour le béton. Cet opérande permet de vérifier que les paramètres associés aux comportements choisis sous les mots-clés ECOULEMENT, ECRO_ISOT, ECRO_CINE et ELAS existent bien dans le matériau.
Opérande EPAIS#
EPAIS = ep
Définit l’épaisseur de la plaque de béton. On vérifie que \(\mathit{ep}\ge 0\) .
Remarque :
La valeur de cette épaisseur doit être identique à celle donnée dans AFFE_CARA_ELEM pour les éléments de coque utilisant le matériau mat_beton (défini par DEFI_GLRC).
Opérande GAMMA#
GAMMA = gamma
Définit le paramètre d’endommagement qui caractérise la pente de la courbe moment – courbure pendant la fissuration du béton (figure 2). \(gamma\) peut être considéré comme étant le rapport entre la pente durant la fissuration sur la pente élastique. Si \(gamma>0\) , la pente est positive. Si \(gamma<0\) , la pente décroit et la stabilité n’est plus garantie. Dans tous les cas, nous devons avoir \(gamma<\mathit{QP1}\) et \(gamma<\mathit{QP2}\) . La valeur par défaut est 0. Ce paramètre est utilisé uniquement pour le calcul de l’endommagement :
\(\gamma =\frac{{p}_{f}}{{p}_{\mathrm{élas}}}\)
avec :
\(\gamma\) : GAMMA
\({p}_{\mathrm{élas}}\) : pente élastique
\({p}_{f}\) : pente pendant la fissuration

Figure 5.1.3-a : Courbe moment – courbure du comportement d’une plaque en béton armé en flexion.
Opérandes QP1 et QP2#
QP1 = qp1
QP2 = qp2
Définissent des ratios de pentes pour une flexion positive ou négative. Le ratio est supposé être le rapport de la pente de la courbe courbure – moment après fissuration sur la pente élastique. Ils ne sont utilisés que pour le calcul de l’endommagement :
\({Q}_{P}=\frac{{p}_{2}}{{p}_{\mathrm{élas}}}\)
Avec :
\({Q}_{p}\) : ratio des pentes
\({p}_{\mathrm{élas}}\) : pente élastique
\({p}_{2}\) : pente après la fissuration
On vérifie que \(0<\mathit{QPi}<1\) .
Opérandes C1N1/C1N2/C1N3/C2N1/C2N2/C2N3#
C1N1 = c1n1
C1N2 = c1n2
C1N3 = c1n3
C2N1 = c2n1
C2N2 = c2n2
C2N3 = c2n3
Définissent les composantes du tenseur d’écrouissage cinématique de Prager liant les tenseurs des déformations plastiques membranaires avec les efforts de membrane de rappel cinématique.
\(N={\mathrm{CN}}_{1}{\epsilon}_{1}^{p}+{\mathrm{CN}}_{2}{\epsilon}_{2}^{p}\)
Avec :
\({\mathrm{CN}}_{1}=(\begin{array}{ccc}\mathrm{C1N1}& 0& 0\\ 0& \mathrm{C1N2}& 0\\ 0& 0& \mathrm{C1N3}\end{array})\)
\({\mathrm{CN}}_{2}=(\begin{array}{ccc}\mathrm{C2N1}& 0& 0\\ 0& \mathrm{C2N2}& 0\\ 0& 0& \mathrm{C2N3}\end{array})\)
\({\epsilon}_{1}^{p}\) et \({\epsilon}_{2}^{p}\) sont les tenseurs de déformation plastique membranaire pour le critère de plasticité 1 et 2.
On vérifie que \(\mathit{CiNj}\ge 0\) .
Opérandes C1M1/C1M2/C1M3/C2M1/C2M2/C2M3#
C1M1 = c1m1
C1M2 = c1m2
C1M3 = c1m3
C2M1 = c2m1
C2M2 = c2m2
C2M3 = c2m3
Définissent les composantes du tenseur d’écrouissage cinématique de Prager liant les tenseurs des courbures plastiques avec les moments de rappel cinématique.
\(M={\mathrm{CM}}_{1}{\kappa}_{1}^{p}+{\mathrm{CM}}_{2}{\kappa}_{2}^{p}\)
Avec :
\({\mathrm{CM}}_{1}=(\begin{array}{ccc}\mathrm{C1M1}& 0& 0\\ 0& \mathrm{C1M2}& 0\\ 0& 0& \mathrm{C1M3}\end{array})\)
\({\mathrm{CM}}_{2}=(\begin{array}{ccc}\mathrm{C2M1}& 0& 0\\ 0& \mathrm{C2M2}& 0\\ 0& 0& \mathrm{C2M3}\end{array})\)
\({\kappa}_{1}^{p}\) et \({\kappa}_{2}^{p}\) sont les tenseurs de courbure plastique pour les critères de plasticité 1 et 2.
Le calcul des \({C}_{i}{M}_{j}\) est effectué en utilisant MOCO.
\({C}_{i}{M}_{j}=\frac{{p}_{\mathrm{élas}}{p}_{p}}{{p}_{\mathrm{élas}}-{p}_{p}}\)
avec :
\({p}_{\mathrm{élas}}\) : pente élastique
\({p}_{p}\) : pente plastique
On vérifie que \({C}_{i}{M}_{j}\ge 0\) .
Opérandes BT1/BT2et EAT/OMT#
BT1 = bt1
BT2 = bt2
EAT = eat
OMT = omt
Dans le cas où les éléments finis supportent le calcul des efforts tranchants, ces opérandes servent à définir la matrice élastique de rigidité de cisaillement transverse. Les efforts tranchants \(V\) sont reliés aux distorsions \(\gamma\) par :
\(V=\left[\begin{array}{cc}\mathit{BT1}& 0\\ 0& \mathit{BT2}\end{array}\right]:\gamma\)
Si l’utilisateur renseigne le module de Young des aciers transversaux EAT ainsi que la section d’acier transversaux par mètre linéique OMTalors on déduit les coefficients de la matrice de rigidité par la relation suivante :
\({\mathit{bt}}_{i}=\frac{5}{6}\frac{\mathit{ep}}{2}(\frac{\mathit{eb}}{1+\mathit{nub}}+\mathit{eat}\times \mathit{omt})\)
L’utilisateur ne peut pas renseigner à la fois BT1, BT2et les paramètres EAT, OMT.
On vérifie que ces opérandes sont des réels strictement positifs.
Opérandes MP1X/MP1Y/MP2X/MP2Y et MP1X_FO/MP1Y_FO/MP2X_FO/MP2Y_FO#
MP1X = mp1x
MP1Y = mp1y
MP2X = mp2x
MP2Y = mp2y
MP1X_FO = mp1x_fo
MP1Y_FO = mp1y_fo
MP2X_FO = mp2x_fo
MP2Y_FO = mp2y_fo
Définissent les moments plastiques limites du critère généralisé de Johansen utilisé dans le modèle de comportement GLRC_DAMA. Ils peuvent être définis soient par des valeurs constantes soient par des fonctions. Il n’est pas possible de mélanger des fonctions et des constantes. De plus dès qu’une des opérandes est renseignée, il est obligatoire de toutes les renseigner. Quand celles-ci ne sont pas spécifiées, elles sont calculées de manière automatique.
Mot clé ARMA#
Le mot clé facteur ARMA permet de définir les caractéristiques géométriques et matériau des armatures passives.
Opérande MATER#
MATER= mat_acier
Définit le nom du matériau produit par DEFI_MATERIAU utilisé pour les armatures passives.
Cet opérande permet de récupérer les paramètres matériau utilisés pour les armatures passives (module de Young \({E}_{a}\) , coefficient de Poisson \({\nu}_{a}\) et limite élastique \({\sigma}_{\mathrm{ya}}\) ).
Opérandes OMX et OMY#
OMX = Wxa
OMY = Wya
Définissent les sections d’acier d’un lit d’armatures donné suivant les directions \(x\) et \(y\) (en \({m}^{2}/m\) linéaire, l’épaisseur étant alors donnée en \(m\) ).
On vérifie que \(\mathit{Wxa}\ge 0\) et \(\mathit{Wya}\ge 0\) .
Opérandes RX et RY#
RX = rxa
RY = rya
Définissent la position adimensionnée d’un lit d’armatures par rapport à l’épaisseur de la coque en béton, donnée dans les directions \(x\) et \(y\) (\(-1\le \mathit{rxa}\le 1\) , \(-1\le \mathit{rya}\le 1\) , figure 3).
Figure 5.2.3-a : D éfinition de la position adimensionnée des lits d’armatures.
Mot clé CABLE_PREC#
Le mot clé facteur CABLE_PREC permet de définir les caractéristiques géométriques et matériau des câbles de précontrainte ainsi que l’effort de précontrainte utilisé.
Opérande MATER#
MATER = mat_cable
Définit le nom du matériau produit par DEFI_MATERIAU utilisé pour les câbles de précontrainte.
Cet opérande permet de récupérer les paramètres matériau utilisés pour les câbles de précontrainte (module de Young \({E}_{p}\) , coefficient de Poisson \({\nu}_{p}\) et limite élastique \({\sigma}_{\mathrm{yp}}\) ).
Opérandes OMX et OMY#
OMX = Wxp
OMY = Wyp
Définissent les sections d’acier d’un lit de câbles de précontrainte donné suivant les directions \(x\) et \(y\) (en \({m}^{2}/m\) linéaire, l’épaisseur étant alors donnée en \(m\) ).
On vérifie que \(\mathit{Wxp}\ge 0\) et \(\mathit{Wyp}\ge 0\) .
Opérandes RX et RY#
RX = rxp
RY = ryp
Définissent la position adimensionnée d’un lit de câbles de précontrainte par rapport à l’épaisseur de la coque en béton, donnée dans les directions \(x\) et \(y\) (\(-1\le \mathit{rxp}\le 1\) , \(-1\le \mathit{ryp}\le 1\) ).
Opérandes PREX et PREY#
PREX = precx,
PREY = precy,
Définissent les forces de précontrainte (en Newton) dans les directions \(x\) et \(y\) (elles doivent être normalement négatives car on applique un effort de compression).
Mot clé LINER#
Le mot clé facteur LINER permet de définir les caractéristiques géométriques et matériau du liner métallique.
Opérande MATER#
MATER = mat_liner
Définit le nom du matériau produit par DEFI_MATERIAU utilisé pour le liner métallique.
Cet opérande permet de récupérer les paramètres matériau utilisés pour le liner métallique (module de Young \({E}_{l}\) , coefficient de Poisson \({\nu}_{l}\) et limite élastique \({\sigma}_{\mathrm{yl}}\) ).
Opérande OML#
OML = Wl
Définit l’épaisseur du liner (en mètres selon le choix opéré pour le autres paramètres dimensionnés).
On vérifie que \(\mathit{Wl}\ge 0\) .
Opérande RLR#
RLR = rlr,
Définit la position adimensionnée du liner par rapport à l’épaisseur de la coque en béton (en pratique, \(\mathit{rlr}=-1\) ou \(\mathit{rlr}=1\) , car le liner métallique est disposé en face inférieure ou supérieure de la coque en béton).
Mot clé ALPHA#
Ce mot clé permet de définir un coefficient de dilatation thermique «moyen» (et isotrope) pour l’élément de coque.
Mot clé INFO#
Impression au format RESULTAT de la liste des paramètres homogénéisés utilisés en entrée du modèle de comportement GLRC_DAMAGE.
Exemple d’utilisation#
L’exemple suivant est issu du test SDNS106A:
MAT = DEFI_GLRC( RELATION = GLRC_DAMAGE,
BETON = _F(
MATER = MAT_B,
EPAIS = EP,
GAMMA = 0.0,
QP1 = 0.15,
QP2 = 0.15,
C1N1 = 87.3E6,C1N2 = 87.3E6,C1N3 = 87.3E6,
C2N1 = 87.3E6,C2N2 = 87.3E6,C2N3 = 87.3E6,
C1M1 = 14.8E6,C1M2 = 14.8E6,C1M3 = 14.8E6,
C2M1 = 14.8E6,C2M2 = 14.8E6,C2M3 = 14.8E6,),
NAPPE = (
_F(MATER = MAT_A1,
OMX = 5.65E-4,
OMY = 5.65E-4,
RX = 0.95,
RY = 0.95,),
_F(MATER = MAT_A1,
OMX = 5.65E-4,
OMY = 5.65E-4,
RX = -0.95,
RY = -0.95,),),
LINER = _F(
MATER = MAT_A2,
OML = 6.E-3,
RLR = -1.,),
CABLE_PREC = _F(
MATER = MAT_A2,
OMX = 4.56E-3,
OMY = 1.35E-2,
RX = 0.0,
RY = 0.0,
PREX = -3.0E6,
PREY = -3.0E6,),
INFO = 2,);
Remarque :
Dans cet exemple, on utilise 3 matériaux différents : MAT_B (béton), MAT_A1 (armatures passives) et MAT_A2 (liner métallique et câbles de précontrainte). Avant de définir les paramètres de DEFI_GLRC, il est obligatoire d’utiliser DEFI_MATERIAU pour renseigner tous les paramètres concernant ces matériaux:
MAT_B=DEFI_MATERIAU(
ELAS = _F(
E = 30000.E6,
NU = 0.2,
RHO = 2500.0,),
BETON_ECRO_LINE = _F(
D_SIGM_EPSI = 0.0,
SYT = 5E6,
SYC = -35.E6,),);
MAT_A1=DEFI_MATERIAU(
ELAS = _F(
E = 2.E11,
NU = 0.0,),
ECRO_LINE = _F(
D_SIGM_EPSI = 0.0,
SY = 3.E9,),);
MAT_A2=DEFI_MATERIAU(
ELAS = _F(
E = 2.E11,
NU = 0.3,),
ECRO_LINE = _F(
D_SIGM_EPSI = 0.0,
SY = 5.E8,),);
Bien que les formules d’homogénéisation utilisées dans DEFI_GLRC n’exploitent que les valeurs de seuil SY pour ECRO_LINE et SYT, SYC pour BETON_ECRO_LINE de DEFI_MATERIAU, on est obligé de renseigner aussi les valeurs D_SIGM_EPSI comme indiqué ci-dessus, puisque il s’agit de mots-clés obligatoires.