r7.01.02 Modélisation des câbles de précontrainte#
Résumé
Pour améliorer la résistance de certaines structures de génie civil, on utilise du béton précontraint: pour cela, le béton est comprimé à l’aide de câbles de précontrainte en acier. Dans Code_Aster , il est possible de faire des calculs de telles structures: les câbles de précontrainte sont modélisés, soit par des éléments BARRE à deux nœuds soit par des éléments CABLE_GAINE à 3 nœuds, qui sont ensuite liés cinématiquement aux éléments de volume ou de plaque qui constituent la partie béton de la structure. Pour réaliser ce calcul, il existe trois commandes spécifiques à ces câbles de précontrainte, DEFI_CABLE_BP qui permet de définir géométriquement le câble et les conditions de mise en tension, AFFE_CHAR_MECA, opérande RELA_CINE_BP, qui permet de transformer les informations calculées par DEFI_CABLE_BP en chargement pour la structure, et CALC_PRECONT qui permet l’application de la précontrainte sur la structure.
Les spécificités principales de la modélisation basée sur les éléments BARRE ou CABLE_GAINE dans le cas adhérent sont les suivantes:
Le profil de tension le long d’un câble peut être calculé (i) soit selon le règlement BPEL 91 [bib1] en tenant compte du recul d’ancrage, de la perte par frottement rectiligne et curviligne, de la relaxation des câbles, du fluage et du retrait du béton, (ii) soit selon le règlement ETC-C en tenant du recul d’ancrage, de la perte par frottement et par relaxation des câbles. Dans ces deux cas, la liaison câble/béton est supposée parfaite, à l’image des gaines injectées par un coulis.
Il est possible de définir une zone d’ancrage (au lieu d’un point d’ancrage) afin d’atténuer les singularités de contraintes dues à l’application de la tension sur un seul nœud du câble (effet de la modélisation).
Le comportement des câbles est élastoplastique, la dilatation thermique pouvant être prise en compte.
Grâce à l’opérateur CALC_PRECONT, on peut simuler le phasage de la mise en tension des câbles et la mise en tension peut se faire en plusieurs pas de temps en cas d’apparition de non-linéarités. Enfin, la tension finale dans le câble est strictement égale à la tension prescrite par le BPEL.
Les câbles étant modélisés par des éléments finis, leur rigidité reste active tout au long des analyses.
Les spécificités principales de la modélisation basée sur les éléments CABLE_GAINE, dans les cas non-adhérents sont les suivantes:
Il est possible de modéliser des liaisons câble-béton adhérentes, glissantes ou frottantes.
Dans le cas adhérent, c’est le profil de tension calculé selon le BPEL91 qui est imposé; dans les cas frottant et glissant, le profil est obtenu en simulant la mise en tension du câble et éventuellement le recul d’ancrage. Les autres types de perte ne peuvent être pris en compte.
Les opérateurs DEFI_CABLE_BP et CALC_PRECONT sont compatibles avec tous les types d’éléments finis mécaniques volumiques et les éléments de plaque (DKT, Q4GG) pour la description du milieu béton traversé par les câbles de précontrainte et la mise en tension.
L’opérateur DEFI_CABLE_BP#
Évaluation des caractéristiques du tracé des câbles#
Interpolation par spline cubique#
Nous présentons ici la méthode utilisée pour obtenir une interpolation géométrique des câbles, laquelle est indispensable pour calculer précisément l’abscisse curviligne et l’angle \(\alpha\) utilisés dans les formules de perte de précontrainte.
On commence par construire une interpolation de la trajectoire du câble (en fait une interpolation des deux projections de la trajectoire dans les deux plans \(\mathit{Oxy}\) et \(\mathit{Oxz}\) ), puis à partir de ces interpolations, on estime l’abscisse curviligne, et la déviation angulaire cumulée, selon les formules:
\(s(x)=\underset{0}{\overset{x}{\int}}\sqrt{1+{y}^{'2}(x)+{z}^{'2}(x)}\text{dx}\) éq 2.1-1
\(\alpha (x)=\underset{0}{\overset{x}{\int}}\frac{\sqrt{{y}^{''2}(x)+{z}^{''2}(x)+{\left[{y}^{''}(x){z}^{'}(x)-{y}^{'}(x){z}^{''}(x)\right]}^{2}}}{1+{y}^{'2}(x)+{z}^{'2}(x)}\text{dx}\) éq 2.1-2
Afin de conserver la topologie du câble (et en particulier l’ordonnancement des nœuds qui le composent) l’opérateur DEFI_CABLE_BP travaille à partir de mailles et de groupes de mailles, (plutôt que de nœuds et groupes de nœuds), afin de pouvoir calculer les grandeurs en suivant l’enchaînement des nœuds le long du câble.
L’interpolation utilisée pour le calcul de la précontrainte dans le béton sera une interpolation Spline cubique effectuée en parallèle sur les trois coordonnées spatiales en fonction de l’abscisse curviligne. Les coordonnées des nœuds du câble sont les coordonnées « réelles », c’est-à-dire les coordonnées définies par le maillage du câble.
Tous les calculs présentés dans le cadre de l’opérateur DEFI_CABLE_BP sont définis à partir de la géométrie réelle des structures et des positions réelles des nœuds. Les calculs de tension aux nœuds seront effectués de nœuds en nœuds, dans l’ordre donné par la topologie du maillage, à partir des formules citées ci-dessus [éq 2.1-1] et [éq 2.1-2].
Le calcul de la déviation angulaire cumulée et de l’abscisse curviligne nécessite le calcul précis des dérivées de la trajectoire du câble définies dans l’opérateur de façon discrète par la position des nœuds du maillage de câble. Les polynômes de Lagrange présentent des instabilités, en particulier pour des maillages irréguliers. De plus, un nombre de points de discrétisation important conduira à des polynômes de degrés élevés. Par ailleurs une petite incertitude sur les coefficients d’interpolation aura pour conséquence une erreur importante sur les résultats, en terme de dérivées. En choisissant une interpolation polynomiale de faible degré, on obtiendra des dérivées secondes nulles ou non continues (selon le degré).
L’intérêt d’une interpolation cubique de type Spline est d’obtenir des dérives secondes continues et des coûts de calculs d’ordre \(n\) , si \(n\) est le nombre de points de la fonction tabulée à interpoler, avec des polynômes de faible degré. Le principe de cette méthode d’interpolation est décrit exclusivement dans le cas d’une fonction de la forme \(x\to f(x)\) .
On suppose qu’on effectue une interpolation de la fonction tabulée, à partir des valeurs de la fonction aux points de discrétisation \({x}_{1},{x}_{2},\mathrm{...},{x}_{n}\) , et de sa dérivée seconde. On peut ainsi construire un polynôme d’ordre 3, sur chacun des intervalles \({x}_{i},{x}_{i+1}\) , dont l’expression polynomiale est la suivante:
\(y=\frac{{x}_{j+1}-x}{{x}_{j+1}-{x}_{j}}{y}_{j}+\frac{x-{x}_{j}}{{x}_{j+1}-{x}_{j}}{y}_{j+1}+{{\text{Cy}}_{j}}^{''}+{{\text{Dy}}_{j+1}}^{''}\)
avec:
\(C=\frac{1}{6}\left[{(\frac{{x}_{j+1}-x}{{x}_{j+1}-{x}_{j}})}^{3}-(\frac{{x}_{j+1}-x}{{x}_{j+1}-{x}_{j}})\right]{({x}_{j+1}-{x}_{j})}^{2}\)
\(D=\frac{1}{6}\left[{(\frac{x-{x}_{j}}{{x}_{j+1}-{x}_{j}})}^{3}-(\frac{x-{x}_{j}}{{x}_{j+1}-{x}_{j}})\right]{({x}_{j+1}-{x}_{j})}^{2}\)
On peut vérifier aisément que:
\(\begin{array}{c}\begin{array}{ccc}y({x}_{j})={y}_{j}& \text{et}& {y}^{''}({x}_{j})={{y}_{j}}^{''}\end{array}\\ \begin{array}{ccc}y({x}_{j+1})={y}_{j+1}& \text{et}& {y}^{''}({x}_{j+1})={{y}_{j+1}}^{''}\end{array}\end{array}\)
Il faut ensuite estimer les valeurs de la dérivée seconde aux points d’interpolation. En écrivant l’égalité des interpolations sur les intervalles \([{x}_{i-1},{x}_{i}]\) , et \([{x}_{i},{x}_{i+1}]\) de la dérivée d’ordre un, au point \({x}_{i}\) , on obtient l’expression suivante:
\(\frac{{x}_{j}-{x}_{j-1}}{6}{{y}_{j-1}}^{''}+\frac{{x}_{j+1}-{x}_{j-1}}{3}{{y}_{j}}^{''}+\frac{{x}_{j+1}-{x}_{j}}{6}{{y}_{j+1}}^{''}=\frac{{y}_{j+1}-{y}_{j}}{{x}_{j+1}-{x}_{j}}-\frac{{y}_{j}-{y}_{j-1}}{{x}_{j}-{x}_{j-1}}\)
On obtient ainsi \((n-2)\) équations reliant les valeurs des dérivées secondes aux points de discrétisation \({x}_{1},{x}_{2},\mathrm{...},{x}_{n}\) . En écrivant les conditions aux limites en \({x}_{1}\) et \({x}_{n}\) sur les valeurs des dérivées secondes, on obtient un système \((n,n)\) dont on peut déterminer de façon unique la valeur de toutes les dérivées, et obtenir ainsi la fonction d’interpolation. Deux solutions se présentent alors pour l’établissement des conditions aux limites:
fixer la valeur de la dérivée seconde de façon arbitraire aux points \({x}_{1}\) , et \({x}_{n}\) , à zéro par exemple,
attribuer les valeurs réelles de la dérivée seconde en ces points, si cette donnée est accessible.
On obtient un système d’équations ayant pour inconnues les \(n\) dérivées secondes de la fonction tabulée à interpoler. Ce système linéaire a la particularité d’être tri-diagonal, ce qui signifie que la résolution est de l’ordre de \(O(n)\) . En pratique l’interpolation se décompose en deux étapes:
la première consiste à calculer les valeurs estimées de la dérivée seconde aux points, opération qui est effectuée une seule fois,
la seconde consiste à calculer, pour une valeur donnée de \(x\) , la valeur de la fonction interpolée, opération qui peut être répétée autant de fois qu’on le désire.
Des tests effectués sur la fonction sinus, sur trois périodes, montrent que les résultats sont fortement dépendants du nombre de points, ainsi que de la distribution des points de la courbe à interpoler, (résultat attendu), mais que même dans des situations délicates (peu de points et courbe très irrégulière) l’interpolation ne diverge pas. Autrement dit, même si la corrélation concernant la trajectoire du câble n’est pas très bonne (interpolation avec très peu de points) l’interpolation sera approximativement située dans une fourchette proche de la trajectoire réelle. Ce cas ne se présentera pas en pratique, mais permet de vérifier la stabilité de la méthode d’interpolation.
Pour le problème que nous considérons ici, on ne peut pas toujours écrire la trajectoire du câble sous la forme \([y(x)],[z(x)]\) , dans les cas où cette courbe n’est pas bijective, en particulier lorsque la projection de la trajectoire dans l’un des deux plans \(\mathit{Oxy}\) ou \(\mathit{Oxz}\) est cyclique ou fermée (cas d’une structure circulaire en béton).
En prenant une variable intermédiaire du type \(u=\int\mid {x}^{'}\mid ` , paramètre toujours croissant et d'accroissement identique en valeur absolue à celui de la variable :math:`x\) , on peut se ramener à des expressions \([y(u)]\) fonctions bijectives de la variable \(u\) . L’interpolation cubique Spline décrite ci-dessus est alors applicable à la fonction \(y(u)\) (ainsi qu’à la fonction \(z(u)\) ). En pratique, cela conduit cependant à des problèmes de raccords de tangente (points anguleux) aux points où la variable \(x\) change de sens de variation, et à des irrégularités ponctuelles.
On décrit la trajectoire du câble comme une courbe paramétrique. Connaissant un ensemble de points de la courbe, le paramètre le plus facilement accessible est alors l’abscisse curviligne. On écrit la trajectoire du câble sous la forme \([x(p),y(p)]\) , dans le plan \(\mathit{Oxy}\) , (respectivement \([x(p),y(p),z(p)]\) dans un espace à trois dimensions).
La corde cumulée \(p\) discrétisée aux points tabulés de la fonction qu’on interpole \({P}^{1},{P}^{2,}\mathrm{...},{P}^{n}\) se calcule de la façon suivante:
\(p(1)=0\) au point \({P}^{1}\) ,
\(p(k)=p(k-1)\) + distance \(({P}^{k-1}{P}^{k})\) au point \({P}^{k}\)
On dispose ainsi de deux courbes définies par un ensemble de couple [x(i),p(i)] et [y(i),p(i)] auxquelles on peut appliquer directement l’interpolation Spline cubique présentée auparavant, et qui permet de s’affranchir des difficultés rencontrées précédemment. L’interpolation est faite pour les deux coordonnées, (ou trois coordonnées, en dimension 3), de façon indépendante l’une de l’autre.
Méthode sans interpolation#
Il est possible de calculer simplement l’abscisse curviligne et l’angle \(\alpha\) sans faire d’interpolation. Cette méthode est évidement moins précise mais elle est très robuste. De plus, plus le maillage est fin, plus sa précision augmente. Or les problèmes liés à l’interpolation par spline surviennent justement quand le maillage est trop fin par rapport aux irrégularités qu’il contient.
Cette méthode sans interpolation est utilisée quand l’interpolation par spline a échoué (voir 2.1.3 ).
Le calcul des abscisses curvilignes est très simple. Il consiste à sommer la longueur des mailles de câbles.
Calcul de la déviation angulaire cumulée:
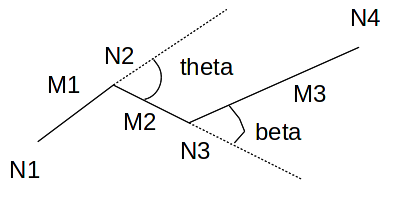
L’exemple suivant suffit à décrire le calcul de la déviation angulaire par cette méthode. Les mailles \({M}_{1}\)
, \({M}_{2}\) et \({M}_{3}\) constituent un câble. \({N}_{1}\) est le premier nœud du câble, la valeur de sa déviation angulaire cumulée est \(\alpha =0\) . L’angle \(theta\) est la déviation angulaire entre les mailles \({M}_{1}\) et \({M}_{2}\) .
En tout point de \(]{N}_{1}{N}_{2}[\) la déviation angulaire cumulée est toujours nulle car le vecteur tangent à la courbe en ces points est \(\overrightarrow{{N}_{1}{N}_{2}}\) . En tout point de \(]{N}_{2}{N}_{3}[\) , la déviation angulaire cumulée est égale à \(theta\) car le vecteur tangent en chacun de ces points est \(\overrightarrow{{N}_{2}{N}_{3}}\) ( \(theta\) est l’angle entre \(\overrightarrow{{N}_{1}{N}_{2}}\) et \(\overrightarrow{{N}_{2}{N}_{3}}\) ). Il a été décidé, que le vecteur tangent à la courbe en \({N}_{2}\) est la moyenne de \(\overrightarrow{{N}_{1}{N}_{2}}\) et \(\overrightarrow{{N}_{2}{N}_{3}}\) . Ce qui donne que la déviation angulaire cumulée en \({N}_{2}\) est \(\alpha =\frac{theta}{2}\) .
Avec la même logique, la déviation angulaire cumulée en \({N}_{3}\) est \(\alpha =theta+\frac{beta}{2}\) , et \(theta+beta\) en \({N}_{4}\) .
Contrôle de l’interpolation par spline#
Afin de contrôler si les interpolations par spline pour les trois coordonnées de l’espace sont correctes, on calcule le nombre de changements de variation de la dérivée première et le nombre de changements de signe de la dérivée seconde. Si le nombre de changements de signe est plus petit que le nombre de changements de variation (+ une constante entière fixée à 10), on considère que l’interpolation est de bonne qualité. Dans le cas contraire, on passe à la méthode sans interpolation.
Détermination du profil de tension dans le câble d’après BPEL 91#
Formule générale#
L’opérateur DEFI_CABLE_BP permet de calculer la tension \(F(s)\) le long de l’abscisse curviligne \(s\) du câble. Celle-ci est déterminée à partir des règles du BPEL 91 [bib1].
Globalement, on aboutit à la formulation suivante:
\(F(s)=\tilde{F}(s)-\left\lbrace {x}_{\text{flu}}\times {F}_{0}+{x}_{\text{ret}}\times {F}_{0}+r(j)\times \frac{5}{100}\times {\rho}_{1000}\left[\frac{\tilde{F}(s)}{{S}_{a}\times {\sigma}_{y}}-{\mu}_{0}\right]\times \tilde{F}(s)\right\rbrace\) éq 2.2.1-1
où \(s\) désigne l’abscisse curviligne le long du câble. Les paramètres introduits dans cette expression sont:
\({F}_{0}\) tension initiale,
\({x}_{\mathrm{flu}}\) taux forfaitaire de perte de tension par fluage du béton, par rapport à la tension initiale,
\({x}_{\mathrm{ret}}\) taux forfaitaire de perte de tension par retrait du béton, par rapport à la tension initiale,
\({\rho}_{1000}\) relaxation de l’acier à 1000 heures, exprimée en %,
\({S}_{a}\) aire de la section droite du câble,
\({\sigma}_{y}\) contrainte limite élastique de l’acier,
\({\mu}_{0}\) coefficient adimensionnel de relaxation de l’acier précontraint.
Dans cette formule, \({F}_{0}\) désigne la tension initiale aux ancrages (avant recul), \(\tilde{F}(s)\) représente la tension après la prise en compte des pertes par frottement et par recul d’ancrage, \({x}_{\text{flu}}\times {F}_{0}\) représente la perte de tension par fluage du béton, \({x}_{\text{ret}}\times {F}_{0}\) la perte de tension par retrait du béton, \(r(j)\times \frac{5}{100}\times {\rho}_{1000}\left[\frac{\tilde{F}(s)}{{S}_{a}\times {s}_{y}}-{m}_{0}\right]\times \tilde{F}(s)\) les pertes par relaxation des aciers.
Remarque:
L’introduction dans ces éléments de pertes de tension est facultative. Ainsi, si l’on envisage de faire un calcul de fluage et/ou de retrait du béton en utilisant une loi appropriée avec STAT_NON_LINE, il ne faut pas introduire ces éléments dans les pertes calculées par DEFI_CABLE_BP.
L’évaluation des pertes nécessite la connaissance de l’abscisse curviligne \(s\) et de la déviation angulaire cumulée \(\alpha\) calculée à partir des dérivées première et seconde de la trajectoire du câble. Le calcul précis de ces dérivées nécessite une interpolation entre les points de passage du câble. Cette interpolation est réalisée à l’aide de Splines, meilleurs que les polynômes de Lagrange qui présentent des instabilités, en particulier pour des maillages irréguliers (cf. paragraphe précédent).
Dans ce qui suit chacun des mécanismes intervenant dans le calcul de la tension est détaillé.
Perte de tension par frottement#
Nous commençons par calculer la tension le long du câble en tenant compte des pertes par contact entre le câble et le béton: \({F}_{c}(s)={F}_{0}\exp\left(-f\alpha -\phi s\right)\)
où \(\alpha\) désigne la déviation angulaire cumulée et les paramètres introduits sont:
\(f\) coefficient de frottement du câble sur le béton en partie courbe, en \({\mathit{rad}}^{-1}\) ,
\(\phi\) coefficient de frottement par unité de longueur, en \({m}^{-1}\) ,
\({F}_{0}\) tension appliquée à une ou aux deux extrémités du câble.
Perte de tension par recul d’ancrage#
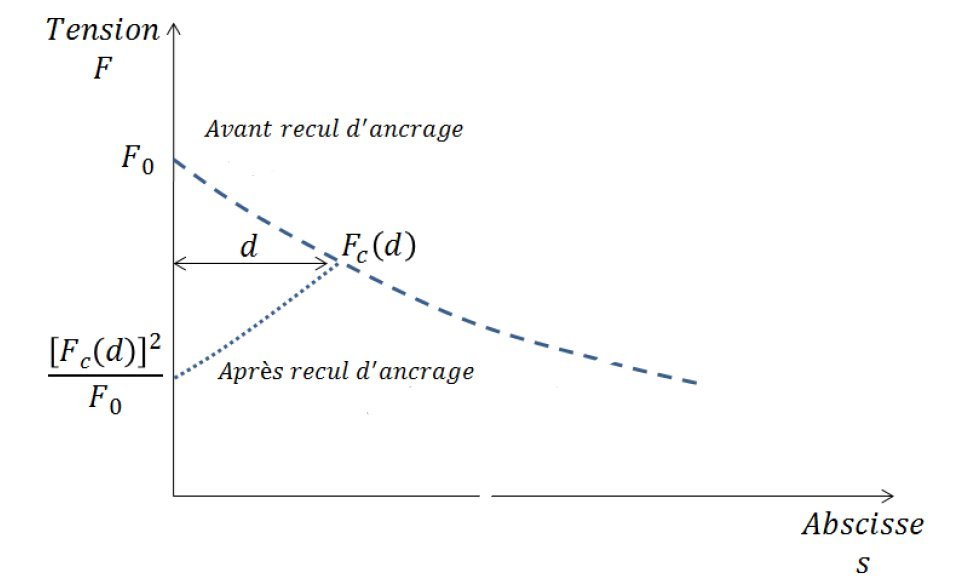
Pour prendre en compte le recul d’ancrage, on fait le raisonnement suivant:
la tension le long du câble est affectée par le recul d’ancrage sur une distance \(d\) que l’on calcule en résolvant un problème à deux inconnues: la fonction \({F}^{\ast }(s)\) qui représente la force après recul de l’ancrage et le scalaire \(d\) :
\(\Delta =\frac{1}{{E}_{a}{S}_{a}}\underset{0}{\overset{d}{\int}}\left[F(s)-{F}^{\ast }(s)\right]\text{ds}\) \(F(s)\) vaut \({F}_{0}{e}^{(-\mathrm{f\alpha }-\phis )}\) \(\Delta\) est la valeur du recul de l’ancrage (c’est une donnée) |
|
\({F}^{\ast }(s)\) , la force après recul de l’ancrage, est déterminée à partir de la formule [bib1]:
\(\left[F(s).{F}^{\ast }(s)\right]={\left[F(d)\right]}^{2}\) ,
La longueur \(d\) sera déterminée de façon itérative grâce à l’intégrale précédente. D’autres auteurs utilisent des relations différentes telles que:
\(\left[F(s)-F(d)\right]=\left[F(d)-{F}^{\ast }(s)\right]\)
Pour le calcul de \(d\) , trois cas particuliers peuvent se présenter:
Cette perte par recul de l’ancrage est localisée dans la zone de l’ancrage. Si le câble est courbe, et la longueur du câble suffisamment courte, il peut arriver que \(d\) soit plus grand que la longueur du câble. Dans ce cas, la perte de précontrainte due au recul de l’ancrage s’applique partout. Il faut calculer la surface comprise entre les deux courbes \(F(s)\) et \({F}^{\ast }(s)\) , qui doit être égale à \({E}_{a}{S}_{a}\Delta\) , et qui permet ainsi de calculer \({F}^{\ast }(s)\) .
Dans le cas où une tension est appliquée à chacune des deux extrémités du câble, appelons \({F}_{1}(s)\) la répartition de tension initiale calculée comme si la tension n’était appliquée qu’au premier ancrage, et \({F}_{2}(s)\) la répartition de tension initiale calculée comme si la tension n’était appliquée qu’au deuxième ancrage. La valeur qui doit être retenue en tout point du câble comme tension initiale est \(F(s)=\mathrm{Max}({F}_{1}(s),{F}_{2}(s))\) .
Enfin, dans le cas où d est plus grand que la longueur du câble, et lorsqu’une tension est appliquée à chacune des deux extrémités du câble (superposition des deux cas précédents), on doit appliquer la procédure suivante:
calcul de \({F}_{1}(s)\) tension initiale calculée comme si la tension n’était appliquée qu’au premier ancrage et en tenant compte du recul d’ancrage (comme dans le cas particulier1),
calcul de \({F}_{2}(s)\) tension initiale calculée comme si la tension n’était appliquée qu’au deuxième ancrage et en tenant compte du recul d’ancrage (comme dans le cas particulier1),
calcul de \(F(s)=\text{Min}({F}_{1}(s),{F}_{2}(s))\) .
Déformations différées de l’acier#
La perte par relaxation de l’acier, pour un temps infini, s’exprime de la façon suivante:
\(r(j)\times \frac{5}{100}\times {\rho}_{1000}\left[\frac{\tilde{F}(s)}{{S}_{a}\times {\sigma}_{y}}-{\mu}_{0}\right]\times \tilde{F}(s)\)
(\({\rho}_{1000}\) la relaxation à 1000 heure en % ; \({\mu}_{0}\) le coefficient de relaxation de l’acier précontraint et \({\sigma}_{y}\) la valeur garantie de la charge maximale à la rupture du câble).
Cette relation exprime la perte par relaxation des câbles pour un temps infini. Le BPEL 91 propose la formule suivante: \(r\left(j\right)=\frac{j}{j+9.{r}_{m}^{0}}\) où \(j\) indique l’âge de l’ouvrage en jours et \({r}_{m}^{0}\) un rayon caractéristique obtenu en faisant le rapport de la section de la structure en béton, en \({m}^{2}\) , par le périmètre de la section (en mètres) de béton.
Perte de tension par déformations instantanées du béton#
Les pertes instantanées ne sont pas prises en compte dans la formule [éq 2.2.1-1] utilisée dans Code_Aster . Ce que le BPEL appelle perte de tension instantanée est en fait la perte de tension induite dans des câbles déjà posés par la pose d’un nouveau groupe de câbles. Pour modéliser ce phénomène, il faut représenter le phasage de mise en précontrainte dans le calcul Code_Aster, c’est-à-dire ne pas tendre l’ensemble des câbles au même moment mais de façon successive en enchaînant les CALC_PRECONT (voir test SSNV164).
Détermination du profil de tension dans le câble d’après l’ETC-C#
Formule générale#
L’opérateur DEFI_CABLE_BP permet de calculer la tension \(F(s)\) le long de l’abscisse curviligne \(s\) du câble selon les règles de l’ETC-C [bib4].
La formule théorique est la suivante:
\(F(s)={F}_{0}-\Delta {F}_{\mu}-\Delta {F}_{\mathit{anc}}-\Delta {F}_{\mathit{el}}-\Delta {F}_{r}-\Delta {ϵ}_{\mathit{cs}}-\Delta {ϵ}_{\mathit{cc}}\)
où:
\({F}_{0}\) est la tension initiale appliquée au câble
\(\Delta {F}_{\mu}\) sont les pertes de tension par frottement,
\(\Delta {F}_{\mathit{anc}}\) sont les pertes de tension dues au recul d’ancrage,
\(\Delta {F}_{\mathit{el}}\) sont les pertes de tension dues à la déformation élastique du béton,
\(\Delta {F}_{r}\) sont les pertes de tension dues à la relaxation des aciers,
\(\Delta {F}_{\mathit{cs}}\) sont les pertes de tension dues au retrait du béton,
\(\Delta {F}_{\mathit{cc}}\) sont les pertes de tension dues au fluage du béton.
Les pertes dues à la déformation élastique sont estimées selon l’ETC-C à:
\(\Delta {F}_{\mathit{el}}(s)=\frac{{A}_{p}{E}_{p}\Delta {\sigma}_{c}(x)}{2E}\)
avec \(E\) module d’Young du béton, \({A}_{p}\) et \({E}_{p}\) la section et le module d’Young de l’acier , et \(\Delta {\sigma}_{c}(x)\) la contrainte induite dans le béton par la précontrainte.
Elles peuvent être estimées en simulant le phasage de la mise en précontrainte grâce à l’opérateur CALC_PRECONT. Ces pertes ne sont pas prises en compte dans l’opérateur DEFI_CABLE_BP.
Les pertes de tension dues au retrait du béton \(\Delta {F}_{\mathit{cc}}\) et au fluage du béton \(\Delta {F}_{\mathit{cs}}\) , peuvent être obtenues en imposant un champ de déformation équivalent après la mise en tension des câbles. La encore, elles ne sont donc pas prises en compte dans l’opérateur DEFI_CABLE_BP.
Au final, la formule implantée dans DEFI_CABLE_BP est la suivante:
\(F(s)={F}_{0}-\Delta {F}_{\mu}-\Delta {F}_{\mathit{anc}}-\Delta {F}_{r}\) éq. 2.3.1-1
Les 3 types de perte sont détaillés dans les paragraphes ci-dessous.
Pertes de tension par frottement#
Conformément à l’ETC-C, les pertes par frottement sont estimées par la formule suivante:
\({F}_{c}(s)={F}_{0}\left(1-{e}^{-\mu (\alpha +k\text{}s)}\right)\) [éq. 2.3.2-1]
où \(\alpha\) désigne la déviation angulaire cumulée et les paramètres introduits sont:
\(\mu\) coefficient de frottement du câble sur le béton e
\(k\) le coefficient de perte en ligne \([{m}^{-1}]\)
\({F}_{0}\) tension appliquée à une ou aux deux extrémités du câble.
Pertes de tension par recul d’ancrage#
La formule est identique au BPEL. Se reporter au § 2.2.3 .
Pertes dues à la relaxation de l’acier#
La formule donnée par l’ETC-C est la suivante:
\(\Delta {F}_{r}(s)=0,8\times 0,66{\rho}_{1000}.{\exp}^{9,1\tilde{F}(s)/{F}_{\mathit{prg}}}.{(\frac{\mathit{nh}}{1000})}^{0,75(1-\tilde{F}(s))/{F}_{\mathit{prg}}}.{10}^{-5}\tilde{F}(s)\) éq 23.4-1
où:
\(s\) désigne l’abscisse curviligne le long du câble.
\({\rho}_{1000}\) relaxation de l’acier à 1000 heures, exprimée en %,
\({F}_{\mathit{prg}}\) contrainte à rupture dans l’acier,
\(\mathit{nh}\) le nombre d’heures après la mise en précontrainte correspondant à la date ou les pertes par relaxation de l’acier sont calculées.
Dans cette formule, \(\tilde{F}(s)\) représente la tension après la prise en compte des pertes par frottement et par recul d’ancrage ainsi que normalement après prise en compte des pertes élastiques.
Deux options de calcul sont proposées correspondant au choix TYPE_RELAX=”ETCC_DIRECT” ou TYPE_RELAX=”ETCC_REPRISE”.
Si l’utilisateur choisit l’option TYPE_RELAX=”ETCC_DIRECT”, alors la tension utilisée pour calculer la perte due à la relaxation des aciers ne prend pas en compte les pertes élastiques mais uniquement les pertes par frottement et par recul d’ancrage.
Si l’utilisateur choisit l’option TYPE_RELAX=”ETCC_REPRISE”, alors la tension utilisée pour calculer la perte due à la relaxation des aciers prend les 3 types de pertes de précontrainte en compte. Cette tension doit être fournie par l’utilisateur (mot-clé TENSION sous MODI_CABLE_ETCC). Elle aura été obtenue au cours d’un premier calcul que l’on peut qualifier d’état à «court-terme» en modélisant les pertes, par frottement, par recul d’ancrage et les pertes élastiques par modélisation du phasage (cf. test SSNV229B pour exemple de mise en œuvre).
Détermination des relations cinématiques entre acier et béton#
Puisque les nœuds du maillage de câble ne coïncident pas forcément avec les nœuds du maillage de béton, il est nécessaire de définir des relations cinématiques modélisant l’adhésion parfaite entre les câbles et le béton.
Les paragraphes suivants décrivent dans l’ordre les considérations géométriques spatiales permettant de définir la notion de voisinage entre les nœuds d’éléments de câble et de béton, puis la méthode de calcul des coefficients des relations cinématiques.
Définition des nœuds voisins#
Le calcul des coefficients des relations cinématiques nécessite de déterminer les nœuds « voisins » de chacun des nœuds du maillage du câble. Le schéma qui suit symbolise un nœud câble et une maille béton:

La maille définie par les nœuds \(1,2,3,4\) contient le nœud câble. Les nœuds voisins sont donc les sommets \(1,2,3,4\) . Si le nœud câble est situé à l’intérieur d’un élément à \(p\) nœuds \({P}_{1},{P}_{2},\mathrm{...},{P}_{n}\) , alors les nœuds \({P}_{1},{P}_{2},\mathrm{...},{P}_{n}\) sont appelés « nœuds voisins » du nœud câble.
On traite de la même façon, les éléments de plaque sans excentrement, et les éléments massifs. Le calcul de l’excentrement de chaque nœud du maillage câble est nécessaire pour le calcul des coefficients des relations cinématiques.
Dans le cas d’éléments de plaque, lorsque le nœud câble est caractérisé par un excentrement non nul, on définit les nœuds voisins comme l’ensemble des nœuds sommet de l’élément qui contient la projection du nœud câble dans le plan tangent au maillage béton. Dans le cas où le nœud câble (ou bien sa projection dans le plan tangent au maillage béton) appartient à une frontière d’un élément, ce sont les sommets de cette frontière qui forment l’ensemble des nœuds voisins.
Calcul des coefficients des relations cinématiques#
Dans l’ensemble des descriptions qui suivent les grandeurs sont systématiquement exprimées dans le repère global du maillage. Les liaisons cinématiques s’expriment donc en fonction des degrés de liberté exprimés dans cette base. Les normales et vecteurs rotation sont exprimés dans le repère global, sauf mention contraire explicite.
Dans la modélisation éléments finis de la structure câble-béton, le déplacement d’un point matériel de la structure béton peut s’exprimer facilement à l’aide des fonctions de forme de l’élément ou de la maille béton dont les sommets forment les nœuds voisins, en fonction des déplacements des nœuds voisins de la discrétisation «béton». De même, une grandeur ou un déplacement d’un point du câble, (ou de sa projection sur le plan tangent du maillage béton) est identique à la valeur de cette grandeur au point matériel de la structure béton qui occupe cette même position (liaison parfaite entre le béton et l’acier), et s’exprime donc en fonction de la valeur de cette même grandeur aux sommets de l’élément, à l’aide des fonctions de forme.
Si \((x,y,z)\) sont les coordonnées du nœud câble, ou celles de sa projection, et \({N}_{1},{N}_{2},\mathrm{...},{N}_{n}\) les fonctions de formes associées aux nœuds béton \({P}_{1},{P}_{2},\mathrm{...},{P}_{n}\) sommets d’un élément du maillage béton (ou sommets d’une frontière d’un élément du maillage béton), et \(({x}_{i},{y}_{i},{z}_{i})\) les coordonnées du nœud \(i\) , alors l’interpolation d’une variable \(u\) sur l’élément s’écrit:
\(u(x,y,z)=\sum_{i=1}^{n}{N}_{i}(x,y,z).u({x}_{i},{y}_{i},{z}_{i})=\sum_{i=1}^{n}{N}_{i}(x,y,z).{u}_{i}\)
\(u\) pouvant être une coordonnée, ou toute autre donnée nodale.
Les liaisons cinématiques permettent d’exprimer l’identité de déplacement entre le nœud du maillage câble, et le point matériel béton qui occupe la même position. Ceci correspond à l’hypothèse d’un liaison parfaite entre le béton et le câble.
Cas où le béton est modélisé par des éléments finis massifs#
En reprenant les notations précédentes et en considérant \({\text{dx}}^{c},{\text{dy}}^{c},{\text{dz}}^{c}\) les déplacements du nœud câble, et \({\text{dx}}_{j}^{b},{\text{dy}}_{j}^{b},{\text{dz}}_{j}^{b}\) les déplacements des nœuds \(j\) (\(j=1,n\) ) de la structure béton voisins du nœud du câble nous obtenons les relations suivantes:
\(\lbrace \begin{array}{c}{\text{dx}}^{c}=\sum_{i=1}^{n}{N}_{i}({x}^{c},{y}^{c},{z}^{c}){\text{dx}}_{{i}^{b}}\\ {\text{dy}}^{c}=\sum_{i=1}^{n}{N}_{i}({x}^{c},{y}^{c},{z}^{c}){\text{dy}}_{{i}^{b}}\\ {\text{dz}}^{c}=\sum_{i=1}^{n}{N}_{i}({x}^{c},{y}^{c},{z}^{c}){\text{dz}}_{{i}^{b}}\end{array}\)
\(n\) étant le nombre de nœuds de l’élément béton voisins du nœud du câble, ou celui d’une de ses frontières. Pour chaque nœud du câble, on obtient 3 relations cinématiques entre les déplacements des nœuds des deux maillages câble et béton.
Cas où le béton est modélisé par des éléments finis de plaque#

Soit \({P}_{0}^{c}\) la position initiale d’un point de câble dans la géométrie non déformée et soit \({P}^{c}\) la position de ce même point après déformation. Appelons \({P}_{0}^{p}\) la projection de \({P}_{0}^{c}\) sur la surface du feuillet moyen de la coque de béton non déformée et \({P}^{p}\) la projection de \({P}^{c}\) sur la surface du feuillet moyen de la coque de béton déformée. Soit \(\overrightarrow{{n}_{0}}\) la normale au plan moyen de la coque de béton en \({P}_{0}^{p}\) et \(\overrightarrow{n}\) celle en \({P}^{p}\) .
\({P}_{O}^{p}\) est donné par: \(\left\lbrace \begin{array}{c}{x}_{0}^{p}\\ {y}_{0}^{p}\\ {z}_{0}^{p}\end{array}\right\rbrace =\left\lbrace \begin{array}{c}{x}_{0}^{c}\\ {y}_{0}^{c}\\ {z}_{0}^{c}\end{array}\right\rbrace -\left[\left\lbrace \begin{array}{c}{x}_{0}^{c}-{x}_{0}^{b}\\ {y}_{0}^{c}-{y}_{0}^{b}\\ {z}_{0}^{p}-{y}_{0}^{b}\end{array}\right\rbrace \cdot \left\lbrace \begin{array}{c}{n}_{\mathrm{0x}}\\ {n}_{\mathrm{0y}}\\ {n}_{\mathrm{0z}}\end{array}\right\rbrace \right]\cdot \left\lbrace \begin{array}{c}{n}_{\mathrm{0x}}\\ {n}_{\mathrm{0y}}\\ {n}_{\mathrm{0z}}\end{array}\right\rbrace\)
\({P}^{p}\) est donné par: \(\left\lbrace \begin{array}{c}{x}_{}^{p}\\ {y}_{}^{p}\\ {z}_{}^{p}\end{array}\right\rbrace =\left\lbrace \begin{array}{c}{x}_{}^{c}\\ {y}_{}^{c}\\ {z}_{}^{c}\end{array}\right\rbrace -\left[\left\lbrace \begin{array}{c}{x}_{}^{c}-{x}_{}^{b}\\ {y}_{}^{c}-{y}_{}^{b}\\ {z}_{}^{p}-{y}_{}^{b}\end{array}\right\rbrace \cdot \left\lbrace \begin{array}{c}{n}_{}x\\ {n}_{}y\\ {n}_{}z\end{array}\right\rbrace \right]\cdot \left\lbrace \begin{array}{c}{n}_{}x\\ {n}_{}y\\ {n}_{}z\end{array}\right\rbrace\)
Le point \({P}_{O}^{p}\) appartient à une maille de plaque de béton dont les nœuds sont notés \({P}_{1}^{b},{P}_{2}^{b}\text{et}{P}_{3}^{b}\) .
On définit l’excentrement du câble par rapport à la coque de béton comme la distance \(e=\parallel \overrightarrow{{P}_{0}^{p}{P}_{0}^{c}}\parallel\) et on fait l’hypothèse que cet excentrement ne varie pas quand la structure se déforme: \(e=\parallel \overrightarrow{{P}_{0}^{p}{P}_{0}^{c}}\parallel =\parallel \overrightarrow{{P}^{p}{P}^{c}}\parallel\)
On introduit les déplacements des points du câble et de sa projection:
\(\overrightarrow{{P}_{0}^{c}{P}^{c}}=\lbrace \begin{array}{c}d{x}^{c}\\ d{y}^{c}\\ d{z}^{c}\end{array}\) \(\overrightarrow{{P}_{0}^{p}{P}^{p}}=\lbrace \begin{array}{c}{\text{dx}}^{p}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{dx}}_{{i}^{b}}\\ {\text{dy}}^{p}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{dy}}_{{i}^{b}}\\ {\text{dz}}^{p}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{dz}}_{{i}^{b}}\end{array}\)
On introduit le vecteur «rotation» \(\overrightarrow{\theta}\) de la plaque au point \({P}^{p}\) et les degrés de liberté de rotation des nœuds de la plaque: \(\overrightarrow{\theta}=\lbrace \begin{array}{c}{\text{drx}}^{b}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{drx}}_{{i}^{b}}\\ {\text{dry}}^{b}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{dry}}_{{i}^{b}}\\ {\text{drz}}^{b}=\sum_{i=1}^{n}{N}_{i}({x}_{0}^{p},{y}_{0}^{p},{z}_{0}^{p}){\text{drz}}_{{i}^{b}}\end{array}\)
Par définition de \(\overrightarrow{\theta}\) , on a : \(\overrightarrow{n}-\overrightarrow{{n}_{0}}=\overrightarrow{\theta}\wedge \overrightarrow{{n}_{0}}\)
On peut alors écrire:
:math:``
\(\overrightarrow{{P}^{p}{P}^{c}}=e\overrightarrow{n}\)
En soustrayant ces deux équations, en tenant compte de la définition de \(\overrightarrow{\theta}\) on trouve:
\(\lbrace \begin{array}{c}{\text{dx}}^{c}-{\text{dx}}^{p}=e.({\text{dry}}^{p}.{n}_{\mathrm{0z}}-{\text{drz}}^{p}.{n}_{\mathrm{0y}})\\ {\text{dy}}^{c}-{\text{dy}}^{p}=e.({\text{drz}}^{p}.{n}_{\mathrm{0x}}-{\text{drx}}^{p}.{n}_{\mathrm{0z}})\\ {\text{dz}}^{c}-{\text{dz}}^{p}=e.({\text{drx}}^{p}.{n}_{\mathrm{0y}}-{\text{dry}}^{p}.{n}_{\mathrm{0x}})\end{array}\)
En injectant dans cette dernière équation les fonctions de forme, on a finalement:
\(\lbrace \begin{array}{c}{\text{dx}}^{c}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{dx}}_{i}^{b})=e.((\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{dry}}_{i}^{b}).{n}_{\mathrm{0z}}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{drz}}_{i}^{b}).{n}_{\mathrm{0y}})\\ {\text{dy}}^{c}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{dx}}_{i}^{b})=e.((\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{drz}}_{i}^{b}).{n}_{\mathrm{0x}}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{drx}}_{i}^{b}).{n}_{\mathrm{0z}})\\ {\text{dz}}^{c}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{dx}}_{i}^{b})=e.((\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{drx}}_{i}^{b}).{n}_{\mathrm{0y}}-(\sum_{i=1}^{n}{N}_{i}({x}^{p},{y}^{p},{z}^{p}){\text{dry}}_{i}^{b}).{n}_{\mathrm{0x}})\end{array}\)
Cas où le nœud du câble se projette sur un nœud du maillage béton#
La distance entre la projection \({P}_{0}^{p}\) du nœud câble \({P}_{0}^{c}\) et un nœud béton \({P}_{i}^{b}\) est donnée par:
\(d=\parallel {P}_{0}^{P}{P}_{i}^{b}\parallel =∥(\begin{array}{}{x}^{c}-{x}_{i}^{b}\\ {y}^{c}-{y}_{i}^{b}\\ {z}^{c}-{z}_{i}^{b}\end{array})-\left[(\begin{array}{}{x}^{c}-{x}_{i}^{b}\\ {y}^{c}-{y}_{i}^{b}\\ {z}^{c}-{z}_{i}^{b}\end{array}).{\overrightarrow{n}}_{0}\right].{\overrightarrow{n}}_{0}∥\)
S’il arrive que cette distance soit nulle (en pratique inférieure à 10-5), c’est que le nœud câble se projette au sommet d’une maille de béton, et alors les relations cinématiques se simplifient:
\(\lbrace \begin{array}{c}{\text{dx}}^{c}-{\text{dx}}_{i}^{p}=e.({\text{dry}}_{i}^{p}.{n}_{\mathrm{0z}}-{\text{drz}}_{i}^{p}.{n}_{\mathrm{0y}})\\ {\text{dy}}^{c}-{\text{dy}}_{i}^{p}=e.({\text{drz}}_{i}^{p}.{n}_{\mathrm{0x}}-{\text{drx}}_{i}^{p}.{n}_{\mathrm{0z}})\\ {\text{dz}}^{c}-{\text{dz}}_{i}^{p}=e.({\text{drx}}_{i}^{p}.{n}_{\mathrm{0y}}-{\text{dry}}_{i}^{p}.{n}_{\mathrm{0x}})\end{array}\)
Ces relations sont les relations générales dans lesquelles: \({N}_{j}({x}^{p},{y}^{p},{z}^{p})=0\) si \(j\ne i\) .
Traitement des zones d’extrémité du câble#
La modélisation d’un câble de précontrainte telle qu’elle est faite dans Code_Aster consiste à représenter l’ensemble câble, gaine de passage, et toutes les pièces d’ancrage, uniquement grâce à une suite d’éléments de barre. Le lien entre les éléments de câbles et le milieu béton est assuré par des conditions cinématiques sur les degrés de liberté de chacun des nœuds du câble, et ceux des éléments béton traversés.
Lorsque l’on applique la mise en tension du câble, on observe que les réactions engendrées aux extrémités des câbles sur le béton créent des niveaux de contraintes très supérieurs à la réalité, et provoquent l’endommagement du béton. A titre d’exemple, dans certaines études, on a pu observer des contraintes de compression de plus de \(200\mathit{MPa}\) , ce qui dépasse largement la valeur expérimentale observée (\(40\mathit{MPa}\) ). Dans la réalité, ce phénomène n’est pas observé grâce à la mise en place d’un cône de diffusion de contrainte (voir dessin ci-dessous) qui répartit la force de précontrainte sur une grande surface du béton. Dans le cas du modèle aux éléments finis, cette surface n’existe pas, puisque la force est directement reprise par un nœud.

|

|
Situation réelle |
Modèle EF sans cône |
Cette façon de modélisation a plusieurs inconvénients:
la concentration de cet effort écrase le béton,
la discrétisation spatiale du modèle change les résultats.
Pour remédier à ce problème, le mot-clé CONEde l’opérateur DEFI_CABLE_BPpermet de répartir cette force de précontrainte non plus sur un nœud, mais sur tous les nœuds contenus dans un volume (tous les nœuds de ce volume sont liés entre eux pour former un solide rigide) délimité par un cylindre de rayon \(R\) et de longueur \(L\) , représentant l’équivalent de la zone d’influence du cône d’épanouissement d’un ancrage (voir figure ci-dessous).

L’identification et la création des relations cinématiques entre les nœuds du béton et du câble se font de façon automatique par la commande DEFI_CABLE_BP, où les nouvelles données \(R\) et \(L\) seront à fournir par l’utilisateur.
Remarque : calcul de la tension du câble en tant que chargement mécanique#
Nous avons fait le choix de laisser les éléments de câble dans le modèle mécanique support du calcul par éléments finis (linéaire ou non). De ce fait, il n’y a pas de calcul de force équivalente à reporter aux nœuds du maillage. On se contente simplement de dire que les câbles de précontrainte ont un état de contrainte initiale non nul. Cet état de contrainte est celui déduit de la tension telle que calculée par DEFI_CABLE_BP.
Pour des raisons de simplicité, l’objet informatique créé par l’opérateur DEFI_CABLE_BP est une table mémorisant des valeurs aux nœuds du câble. Considérons alors deux éléments connexes du câble:
\(\mathrm{e1}\) de sommets \(\mathit{N1}\) et \(\mathit{N2}\) , et
\(\mathrm{e2}\) de sommet \(\mathit{N2}\) et \(\mathit{N3}\) .
Nous supposons que \({l}_{1}\) et \({S}_{1}\) sont la longueur et la section d’un élément \(\mathrm{e1}\) et que \({l}_{2}\) et \({S}_{2}\) sont la longueur et la section de l’élément \(\mathrm{e2}\) .

DEFI_CABLE_BP calculera au nœud \(\mathit{N2}\) une tension \({T}_{{N}_{2}}\) définie par:
\({T}_{{N}_{2}}=\frac{1}{2}(\frac{\underset{{e}_{1}}{\int}T(s)\text{ds}}{{l}_{1}}+\frac{\underset{{e}_{2}}{\int}T(s)\text{ds}}{{l}_{2}})\)
Inversement, pour le calcul élément fini, l’opérateur STAT_NON_LINE considérera que la contrainte initiale dans l’élément \(\mathit{e1}\) est \({\sigma}_{0}^{\mathrm{e1}}=\frac{{T}_{{N}_{1}}+{T}_{{N}_{2}}}{{\mathrm{2S}}_{1}}\)
Remarque:
On considérera toujours que la loi de comportement du câble est de type incrémentale.
La macro-commande CALC_PRECONT#
La macro-commande CALC_PRECONT a pour but d’effectuer la mise en tension des câbles dans le béton à partir des données contenues dans le concept cable_precont issu de DEFI_CABLE_BP.
Deux procédures différentes de mise en tension des câbles sont présentes dans cette macro-commande. L’une ou l’autre de ces procédures est choisie automatiquement selon que le concept cable_precont a été créé avec le mot-clé ADHERENT = “OUI” ou “NON”.
Si ADHERENT = “OUI”, le profil de tension calculé dans DEFI_CABLE_BP est transformé en chargement initial par AFFE_CHAR_MECA.
Sinon, la mise en tension est simulée complètement par un calcul mécanique en imposant des forces sur les degrés de liberté de glissement des éléments CABLE_GAINEà partir des informations contenues dans le concept cable_precont.
Cas adhérent : pourquoi une macro-commande pour la mise en tension ?#
Il est possible de transformer la tension dans les câbles, calculée par DEFI_CABLE_BP, en un chargement directement pris en compte par STAT_NON_LINE grâce à la commande AFFE_CHAR_MECA opérande RELA_CINE_BP (SIGM_BPEL=’OUI’). Dans ce cas, la tension est prise en compte comme un état de contrainte initial lors de la résolution du problème éléments finis complet.

La résolution du problème permet d’atteindre un état d’équilibre entre le câble de précontrainte et le reste de la structure après déformation instantanée. En effet, sous l’action de la tension du câble, l’ensemble câble(s) et béton va se comprimer par rapport à la position initiale (câble en tension, maillage non déformé). La longueur du câble va donc diminuer, et la tension initiale va également, par voie de conséquence, diminuer. On obtient donc un état final avec une tension dans le câble différente de la tension calculée initialement. Il est alors indispensable d’augmenter proportionnellement la tension appliquée in situ au niveau des ancrages pour tenir compte de cette perte.
L’utilisation de la macro-commande CALC_PRECONT permet d’éviter cette phase de correction, en obtenant l’état d’équilibre de la structure avec une tension dans les câbles égale à la tension réglementaire. Par ailleurs du fait de la méthode adoptée, elle permet en plus d’appliquer la tension en plusieurs pas de temps, ce qui peut être intéressant en cas de plastification ou d’endommagement du béton. Elle permet en outre de tendre les câbles de façon non simultanée et donc de manière plus proche de la réalité des chantiers.
Pour bénéficier de ces avantages, le chargement est appliqué sous forme d’un chargement extérieur et non comme un état initial, ce qui permet le chargement progressif de la structure. Par ailleurs, pour éviter la perte de tension dans le câble, l’idée est de ne pas faire agir la rigidité des câbles pendant la phase de mise en tension (cf. [bib3]).
Les différentes étapes réalisées par la macro-commande sont détaillées ici.
Étape 1 : calcul des forces nodales équivalentes#
Cette étape consiste à transformer les tensions internes du câbles calculées par DEFI_CABLE_BP en un chargement extérieur. Pour cela, on réalise un premier STAT_NON_LINE uniquement sur les câbles que l’on souhaite mettre en précontrainte, avec le chargement suivant:
câble encastré
la tension donnée par DEFI_CABLE_BP

Figure 3.1.1-a: Chargement à l’étape 1
On calcule les efforts nodaux sur le câble. On récupère ces efforts grâce à CREA_CHAMP. Et on construit le vecteur chargement associé \(F\) .
Étape 2 : application de la précontrainte au béton#
L’étape suivante consiste à appliquer la précontrainte à la structure en béton, sans faire participer la rigidité du câble. Pour cela, on suppose pour ce calcul que le module d’Young de l’acier est nul. On peut choisir d’appliquer le chargement de précontrainte en un seul pas de temps ou en plusieurs pas de temps si le béton s’endommage.
Le chargement est donc le suivant:
blocage des mouvements de corps rigides pour le béton,
les efforts nodaux issus du premier calcul sur le câble,
les liaisons cinématiques entre le câble et le béton.

Figure 3.1.2-a: Chargement à l’étape 2
Étape 3 : basculement des efforts extérieurs en efforts intérieurs#
Avant de poursuivre le calcul de façon traditionnelle, il est nécessaire de retransformer les efforts extérieurs qui ont permis de déformer la structure en béton en efforts intérieurs. Cette opération se fait sans modification sur les déplacements et les contraintes de l’ensemble de la structure, puisque l’équilibre a été atteint à l’étape 2 : il s’agit d’un simple artifice pour pouvoir poursuivre le calcul. Le chargement est donc le suivant:
blocage des mouvements de corps rigides pour le béton,
les liaisons cinématiques entre le câble et le béton,
tension dans les câbles.

Figure 3.1.3-a: Chargement à l’étape 3
Cas non adhérent#
La valeur donnée au mot-clé TENSION_INIT de DEFI_CABLE_BP est imposée en force sur le degré de liberté GLIS des nœuds d’ancrage actifs du câble alors qu’aux nœuds passifs ce degré de liberté est bloqué à zéro.
Dans le cas d’un ancrage ACTIF/ACTIF, il faut procéder en deux temps:
Une force est imposée sur le premier ancrage actif tandis que le degré de liberté GLIS est bloqué sur le deuxième.
On reprend le calcul en imposant la force sur le deuxième ancrage, le degré de liberté GLIS du premier est alors bloqué à zéro avec une charge de type DIDI.
Si un recul d’ancrage est spécifié dans DEFI_CABLE_BP, un autre calcul est lancé en imposant sur le degré de liberté GLIS un déplacement égal au recul d’ancrage donné. Cette charge étant aussi de type DIDI.
Pour continuer le calcul après CALC_PRECONT, il suffit de bloquer le degré de liberté GLIS des nœuds d’ancrage avec une charge DIDI.
Procédure de modélisation pour un câble modélisé en BARRE#
Les différentes étapes : cas standard#
Pour parvenir à modéliser une structure en béton précontraint la procédure à suivre est la suivante:
modéliser les éléments de béton (DKT, Q4GG, 2D ou 3D),
modéliser les câbles de précontrainte par des éléments barres à deux nœuds (BARRE),
attribuer aux éléments barres les caractéristiques mécaniques des câbles de précontrainte,
définir les paramètres matériaux pour l’acier ainsi que BPEL_ACIER et BPEL_BETON ou ETCC_ACIER et ETCC_BETON,
grâce à l’opérateur DEFI_CABLE_BP calculer les données cinématiques (relations cinématiques entre les nœuds du câble et ceux des éléments de béton) et statiques (profil de tension le long des câbles),
définir les données cinématiques comme chargement mécanique,
faire appel à l’opérateur CALC_PRECONT,
résoudre le problème avec l’opérateur STAT_NON_LINE en intégrant uniquement les données cinématiques et les chargements autre que la précontrainte.
Pour plus d’informations pratiques, se reporter au document [U2.03.06].
Cas particulier#
Si pour une raison où l’autre, l’utilisateur ne souhaite pas utiliser la macro-commande CALC_PRECONT il est possible d’adopter la procédure suivante:
modéliser les éléments de béton,
modéliser les câbles de précontrainte par des éléments barres à deux nœuds (BARRE),
attribuer aux éléments barres les caractéristiques mécaniques des câbles de précontrainte,
grâce à l’opérateur DEFI_CABLE_BP calculer les données cinématiques (relations cinématiques entre les nœuds du câble et ceux des éléments de béton) et statiques (profil de tension le long des câbles),
appliquer ces données cinématiques et statiques comme un chargement mécanique,
résoudre le problème avec l’opérateur STAT_NON_LINE en intégrant tous les chargements.
À l’issue de ce calcul, il faut déterminer les coefficients de correction à appliquer aux tensions initiales appliquées aux câbles (au niveau de la déclaration de l’opérateur DEFI_CABLE_BP) permettant de compenser la perte par déformation instantanée de la structure.
Une fois le fichier de commande modifié par ces coefficients de correction, la modélisation des câbles de précontrainte est accomplie.
Attention, dans le cas d’enchaînement de STAT_NON_LINE, il convient à partir du deuxième appel, de n’inclure dans le chargement que les relations cinématiques et pas la tension dans les câbles, sous peine d’ajouter cette tension, à chaque calcul.
Précautions d’usage et remarques#
Il est recommandé de limiter le recours à un grand nombre de relations cinématiques sous peine d’alourdir le temps de calcul. Toutefois, quand un nœud des éléments de barre constituant les câbles coïncide topologiquement avec un nœud béton, il n’y a pas d’ajout de relation cinématique.
Si on effectue un premier STAT_NON_LINE avant de mettre en tension dans les câbles, il est préférable de désactiver les câbles, soit en ne les prenant pas en compte dans le modèle, soit en leur affectant une tension constamment nulle (loi de comportement SANS), et en incluant dans le chargement les relations cinématiques liant le câble au béton.
Dans le cas où on effectue un phasage de la mise en précontrainte, il faut penser à inclure les relations cinématiques dans le chargement pour les câbles déjà tendus aux étapes précédentes.
Procédure de modélisation pour un câble modélisé en CABLE_GAINE#
Pour parvenir à modéliser une structure en béton précontraint la procédure à suivre est la suivante:
modéliser les éléments de béton (3D),
modéliser les câbles de précontrainte par des éléments 1D à trois nœuds (CABLE_GAINE), en veillant à ce que les éléments ne soient pas linéaires sous peine de ne pas pouvoir évaluer les pertes par frottement dues à la courbure,
attribuer aux éléments CABLE_GAINE les caractéristiques mécaniques des câbles de précontrainte,
définir les paramètres matériaux pour l’acier et pour la loi de frottement (CABLE_GAINE_FROT), mais aussi BPEL_ACIER et BPEL_BETON (même si en pratique, les paramètres ne sont pas utilisés dans les cas frottants),
grâce à l’opérateur DEFI_CABLE_BP calculer les données cinématiques (relations cinématiques entre les nœuds du câble et ceux des éléments de béton) et statiques (profil de tension le long des câbles),
définir les données cinématiques comme chargement mécanique,
faire appel à l’opérateur CALC_PRECONT,
résoudre le problème avec l’opérateur STAT_NON_LINE en intégrant uniquement les données cinématiques et les chargements autre que la précontrainte, et en bloquant le degré de liberté GLIS des nœuds d’ancrage avec un chargement de TYPE=”DIDI”.
Pour CALC_PRECONT et STAT_NON_LINE, il faut utiliser de préférence le critère de convergence RESI_REFE_RELA pour être sûr d’avoir atteint la convergence.
Fonctionnalités et vérification#
Les commandes évoquées dans ce document sont vérifiées par les cas tests suivants:
CALC_PRECONT |
||
SSLV115 |
Élément de béton précontraint en compression et pesanteur |
|
SSNV164 |
Mise en tension de câbles de précontrainte dans une poutre 3D |
|
SSLS137 |
Plaque de béton précontraint avec câble excentré en flexion |
|
ZZZZ347 |
[V6.01.347] |
Validation des câbles frottants CABLE_GAINE |
DEFI_CABLE_BP |
||
SSLV115 |
Élément de béton précontraint en compression et pesanteur |
|
SSNV164 |
Mise en tension de câbles de précontrainte dans une poutre 3D |
|
SSNP108 |
Élément de béton précontraint en compression |
|
SSNP109 |
Câble de précontrainte excentré dans une poutre droite en béton |
|
SSNV137 |
Câble de précontrainte dans une poutre droite en béton |
|
SSNV229 |
Validation des formules ETCC dans DEFI_CABLE_BP |
|
ZZZZ111 |
Validation de l’opérateur DEFI_CABLE_BP |
|
Bibliographie#
Règles BPEL 91, Règles techniques de conception et de calcul des ouvrages et constructions en béton précontraint suivant la méthode des états limites. CSTB, ISBN 2-86891-214-1.
[R3.07.03] «Éléments de plaque DKT, DST, DKTG et Q4g» Manuel de Référence Aster.
GHAVAMIAN, E. LORENTZ: Amélioration des fonctionnalités de la prise en compte de la précontrainte dans Code_Aster , CR – AMA 2002-01
ETC-C 2010 Edition, EPR Technical code for civil works, AFCEN.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
6 |
S. MICHEL-PONNELLE, A. ASSIRE (EDF-R&D/AMA) |
Texte initial |
7 |
S. MICHEL-PONNELLE, A. ASSIRE (EDF-R&D/AMA) |
|
11 |
S. MICHEL-PONNELLE, A. ASSIRE (EDF-R&D/AMA) |
Coques utilisables avec CALC_PRECONT Ajout des formules ETC-C pour calcul de tension |
12 |
S. MICHEL-PONNELLE |
Ajout modélisation CABLE_GAINE |