r5.05.09 Calcul de signaux reconstitués et de la matrice fonction de transferts#
Résumé
Ce document présente les bases théoriques ayant permis de mettre en place la macro-commande CALC_TRANSFERT [U4.53.51].
Cette dernière permet de calculer la matrice fonction de transfert entre deux points, mais aussi de reconstituer les signaux en un point donné, connaissant les signaux en un autre point.
Tables des Matières
Théorie#
Dans ce chapitre, on se place dans un exemple sismique pou présenter la problématique où l’on raisonne dans en repère absolu.
Principe général#
Lors d’un séisme, les signaux enregistrés sont généralement mesurés sur un ouvrage. Ainsi, lorsque l’on souhaite étudier le comportement dynamique de cet ouvrage, le signal d’entrée est une inconnue du modèle numérique qu’il faut déterminer (voir figure 1).
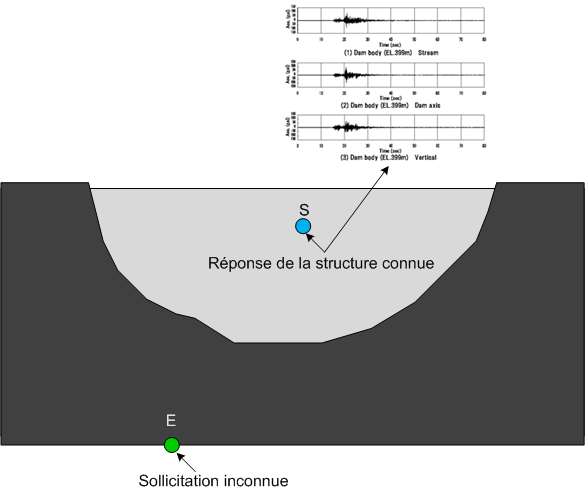
Figure 1 – Représentation schématique du problème
Pour reconstituer le signal d’entrée connaissant le signal de sortie (signal généralement mesuré), on se place dans le domaine fréquentiel et on cherche la fonction de transfert \(\underline{\underline{H}}(\omega )\) entre les deux points de notre système (voir figure 2). Le point d’entrée correspond au point E et le point de sortie au point S sur la figure 1.
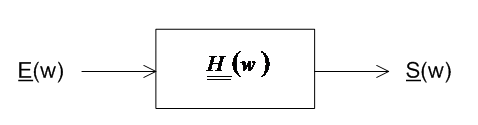
Figure 2 - Schéma de la fonction de transfert
A partir de plusieurs calculs dynamiques unidirectionnel \({\gamma}_{i},\mathit{avec}i=x,y,z\) , il est possible d’accéder à la fonction de transfert en regardant la sortie \(\underline{S}(\omega )\) et l’entrée \(\underline{E}(\omega )\) .
Remarques:
DéterminationLes signaux d’entrée et de sortie doivent être de même nature (ACCE / ACCE ou VITE / VITE ou DEPL / DEPL.
Il est recommander d’utiliser des signaux de type bruit blanc afin d’exciter uniformément la structure sur toute la plage de fréquence.
Une fois la matrice fonction de transfert connue, et connaissant le signal de sortie souhaité, il est possible de reconstituer le signal d’entrée à injecter dans le modèle dynamique pour retrouver le signal de sortie en résolvant le système matriciel suivant:
\(\underline{{E}^{\mathit{absolu}}}(\omega )=\underline{\underline{{H}^{-1}}}(\omega )\underline{{S}^{\mathit{absolu}}}(\omega )\)
Où:
\(\underline{{S}^{\mathit{absolu}}}(\omega )\) |
Vecteur contenant les accélérations absolues mesurées au point de sortie S de la structure lors du séisme |
\(\underline{{E}^{\mathit{absolu}}}(\omega )\) |
Vecteur contenant les accélérations absolues à appliquer au point d’entrée E pour retrouver les accélérations absolues mesurées au point de sortie S |
\(\underline{\underline{{H}^{-1}}}(\omega )\) |
Matrice de fonction de transfert inverse |
Détermination de la matrice fonction de transferts \(\underline{\underline{H}}(\omega )\)#
Dans ce paragraphe, on se propose présenter les équations qui permettent de déterminer la matrice de fonction de transferts \(\underline{\underline{H}}(\omega )\) dans le cas tridimensionnel. Pour faciliter la mise en donnée du problème, on traite le problème en terme d’accélération (ce dernier peut être également traité en terme de déplacement ou de vitesse).
Soit \({E}_{i}^{\mathit{absolu}}\) et \({S}_{i}^{\mathit{absolu}}\) les accélérations absolues calculées respectivement aux points d’entrée et de sortie. On cherche à résoudre le sytèmesuivant :
\(\underline{{S}^{\mathit{absolu}}}(\omega )=\underline{\underline{H}}(\omega )\underline{{E}^{\mathit{absolu}}}(\omega )\)
Où \(\lbrace \begin{array}{c}{S}_{i}^{\mathit{absolu}}={S}_{i}^{\mathit{relatif}}+{\gamma}_{i},i=x,y,z\\ {E}_{i}^{\mathit{absolu}}={E}_{i}^{\mathit{relatif}}+{\gamma}_{i},i=x,y,z\end{array}\) et \(\underline{\underline{H}}(\omega )=\left(\begin{array}{ccc}{H}_{xx}& {H}_{xy}& {H}_{xz}\\ {H}_{yx}& {H}_{yy}& {H}_{yz}\\ {H}_{\mathit{zx}}& {H}_{\mathit{zy}}& {H}_{zz}\end{array}\right)\)
Pour déterminer les 9 inconnues du problème, un système de 9 équations à 9 inconnues doit être résolu. Ce système se détermine en réalisant trois calculs avec un chargement unidirectionnel suivant les directions x, y ou z afin de ne pas négliger les possibles couplage entre directions.
Calcul harmonique suivant X
Soit \(X\text{\_}{\mathit{sortie}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point de sortie et \(X\text{\_}{\mathit{entree}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point d’entrée pour une excitation unidirectionnelle \({\gamma}_{x}\) .
Le système (E1) à résoudre est le suivant:
\((\mathit{E1})\text{}\lbrace \begin{array}{c}X\text{\_}{\mathit{sortie}}_{x}^{a}={H}_{xx}X\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{xy}X\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{xz}X\text{\_}{\mathit{entree}}_{z}^{a}\\ X\text{\_}{\mathit{sortie}}_{y}^{a}={H}_{yx}X\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{yy}X\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{yz}X\text{\_}{\mathit{entree}}_{z}^{a}\\ X\text{\_}{\mathit{sortie}}_{z}^{a}={H}_{\mathit{zx}}X\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{\mathit{zy}}X\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{\mathit{zxz}}X\text{\_}{\mathit{entree}}_{z}^{a}\end{array}\)
Calcul harmonique suivant Y
Soit \(Y\text{\_}{\mathit{sortie}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point de sortie et \(Y\text{\_}{\mathit{entree}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point d’entrée pour une excitation unidirectionnelle \({\gamma}_{y}\) .
Le système (E2) à résoudre est le suivant:
\((\mathit{E2})\text{}\lbrace \begin{array}{c}Y\text{\_}{\mathit{sortie}}_{x}^{a}={H}_{xx}Y\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{xy}Y\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{xz}Y\text{\_}{\mathit{entree}}_{z}^{a}\\ Y\text{\_}{\mathit{sortie}}_{y}^{a}={H}_{yx}Y\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{yy}Y\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{yz}Y\text{\_}{\mathit{entree}}_{z}^{a}\\ Y\text{\_}{\mathit{sortie}}_{z}^{a}={H}_{\mathit{zx}}Y\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{\mathit{zy}}Y\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{\mathit{zxz}}Y\text{\_}{\mathit{entree}}_{z}^{a}\end{array}\)
Calcul harmonique suivant Z
Soit \(Z\text{\_}{\mathit{sortie}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point de sortie et \(Z\text{\_}{\mathit{entree}}_{i}^{a},i=x,y,z\) l’accélération absolue calculée au point d’entrée pour une excitation unidirectionnelle \({\gamma}_{z}\) .
Le système (E3) à résoudre est le suivant:
\((\mathit{E3})\text{}\lbrace \begin{array}{c}Z\text{\_}{\mathit{sortie}}_{x}^{a}={H}_{xx}Z\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{xy}Z\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{xz}Z\text{\_}{\mathit{entree}}_{z}^{a}\\ Z\text{\_}{\mathit{sortie}}_{y}^{a}={H}_{yx}Z\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{yy}Z\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{yz}Z\text{\_}{\mathit{entree}}_{z}^{a}\\ Z\text{\_}{\mathit{sortie}}_{z}^{a}={H}_{\mathit{zx}}Z\text{\_}{\mathit{entree}}_{x}^{a}+{H}_{\mathit{zy}}Z\text{\_}{\mathit{entree}}_{y}^{a}+{H}_{\mathit{zxz}}Z\text{\_}{\mathit{entree}}_{z}^{a}\end{array}\)
En regroupant les systèmes (E1), (E2) et (E3) sous la forme d’un système global (E), on obtient un système de 9 équations à 9 inconnues.
\((E)\text{}\left(\begin{array}{c}X\text{\_}{\mathit{sortie}}_{x}^{a}\\ X\text{\_}{\mathit{sortie}}_{y}^{a}\\ X\text{\_}{\mathit{sortie}}_{z}^{a}\\ Y\text{\_}{\mathit{sortie}}_{x}^{a}\\ Y\text{\_}{\mathit{sortie}}_{y}^{a}\\ Y\text{\_}{\mathit{sortie}}_{z}^{a}\\ Z\text{\_}{\mathit{sortie}}_{x}^{a}\\ Z\text{\_}{\mathit{sortie}}_{y}^{a}\\ Z\text{\_}{\mathit{sortie}}_{z}^{a}\end{array}\right)=\left(\begin{array}{ccccccccc}X\text{\_}{\mathit{entree}}_{x}^{a}& X\text{\_}{\mathit{entree}}_{y}^{a}& X\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0& 0& 0& 0\\ 0& 0& 0& X\text{\_}{\mathit{entree}}_{x}^{a}& X\text{\_}{\mathit{entree}}_{y}^{a}& X\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0\\ 0& 0& 0& 0& 0& 0& X\text{\_}{\mathit{entree}}_{x}^{a}& X\text{\_}{\mathit{entree}}_{y}^{a}& X\text{\_}{\mathit{entree}}_{z}^{a}\\ Y\text{\_}{\mathit{entree}}_{x}^{a}& Y\text{\_}{\mathit{entree}}_{y}^{a}& Y\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0& 0& 0& 0\\ 0& 0& 0& Y\text{\_}{\mathit{entree}}_{x}^{a}& Y\text{\_}{\mathit{entree}}_{y}^{a}& Y\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0\\ 0& 0& 0& 0& 0& 0& Y\text{\_}{\mathit{entree}}_{x}^{a}& Y\text{\_}{\mathit{entree}}_{y}^{a}& Y\text{\_}{\mathit{entree}}_{z}^{a}\\ Z\text{\_}{\mathit{entree}}_{x}^{a}& Z\text{\_}{\mathit{entree}}_{y}^{a}& Z\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0& 0& 0& 0\\ 0& 0& 0& Z\text{\_}{\mathit{entree}}_{x}^{a}& Z\text{\_}{\mathit{entree}}_{y}^{a}& Z\text{\_}{\mathit{entree}}_{z}^{a}& 0& 0& 0\\ 0& 0& 0& 0& 0& 0& Z\text{\_}{\mathit{entree}}_{x}^{a}& Z\text{\_}{\mathit{entree}}_{y}^{a}& Z\text{\_}{\mathit{entree}}_{z}^{a}\end{array}\right)\left(\begin{array}{c}{H}_{xx}\\ {H}_{xy}\\ {H}_{xz}\\ {H}_{yx}\\ {H}_{yy}\\ {H}_{yz}\\ {H}_{\mathit{zx}}\\ {H}_{\mathit{zy}}\\ {H}_{zz}\end{array}\right)\)
Les termes \({H}_{ij}\) sont ensuite déterminés par inversion du système matriciel (E) via les opérateurs d’algèbre linéaire de résolutions disponibles dans la bibliothèque numpy de python,
Détermination du signal à reconstituer#
Lorsque les termes \({H}_{ij}(\omega )\) de la matrice fonction de transferts sont connus, il est possible de reconstituer le signal d’entrée connaissant le signal de sortie. Pour ce faire il suffit de résoudre le système matriciel suivant:
\(\underline{{E}_{\mathit{reconstitué}}^{\mathit{absolu}}}(\omega )=\underline{\underline{{H}^{-1}}}(\omega )\underline{{S}_{\mathit{mesuré}}^{\mathit{absolu}}}(\omega )\)
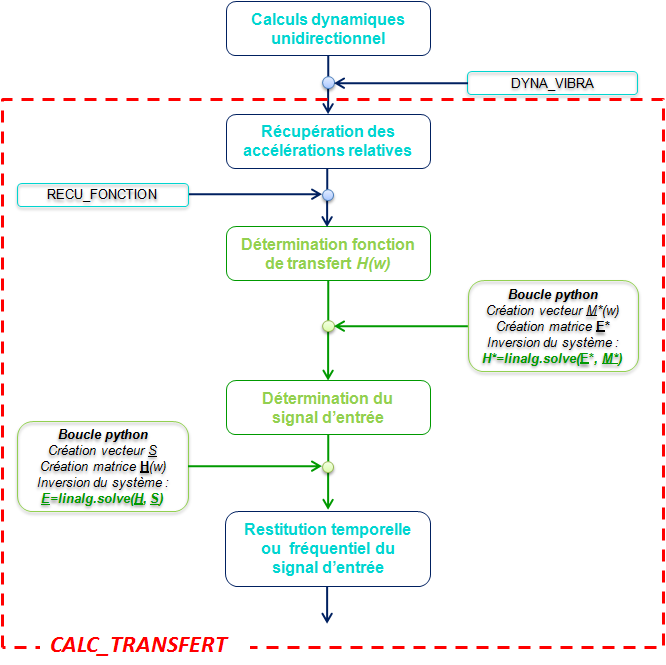
Synoptique de résolution de la macro commande#
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
12.3 |
J,FOUQUÉ EDF-R&D/AMA |
Texte initial |