v6.04.221 SSNV221 – Essai hydrostatique avec un comportement DRUCK_PRAGER linéaire et parabolique#
Résumé:
Le cas test propose un chargement purement hydrostatique pour la loi Drücker-Prager associée [R7.01.16]. La formulation de cette loi plastique, souvent utilisée pour les sols, est faite à la fois sur la partie déviatorique et hydrostatique ; néanmoins, la surface critère présente une singularité pour un état de contrainte purement hydrostatique. Ce cas-test analytique sert à vérifier l’écrouissage correct en cette singularité.
Le test est effectué sur un point matériel avec la commande SIMU_POINT_MAT. On travaille à déformations imposées.
On fait un test avec écrouissage linéaire (modélisation A) et un autre avec écrouissage parabolique (modélisation B).
Solution de référence#
La modélisation vérifie le comportement de la loi à écrouissage linéaire.
Méthode de calcul#
Les équations qui nous intéressent pour le calcul analytique sont (\({I}_{1}=\text{tr}(\sigma )\) : trace du tenseur des contraintes, \({\varepsilon}_{v}^{p}\) : déformation plastique volumique) :
loi constitutive plastique sur la partie volumique :
surface critère, en posant nulle la contrainte de Von Mises (\({\sigma}_{\mathrm{eq}}=0\) ) :
relation entre la déformation plastique volumique et la déformation plastique cumulée (variable interne de la loi plastique) :
expression de l’écrouissage
linéaire :
parabolique :
Déformation à la limite élastique initiale#
Cette déformation est obtenue pour \({\varepsilon}_{v}^{p}=p=0\) .
Si on pose \(F(\sigma ,p)=0\) (évolution plastique) on a :
\({I}_{1}^{\mathrm{el}}=\frac{R(p)}{\alpha}=\frac{{\sigma}_{Y}}{\alpha}\)
\({\varepsilon}_{v}^{\mathrm{el}}=\frac{{I}_{1}^{\mathrm{el}}}{3K}\)
Déformation ultime#
On appelle déformation ultime \({\varepsilon}_{v}^{\mathrm{ult}}\) celle obtenue pour \(p={p}_{\mathrm{ult}}\) .
On trouve facilement la trace de contraintes \({I}_{1}^{\mathrm{ult}}\) et la déformation plastique \({\varepsilon}_{v}^{\mathrm{pult}}\) correspondantes :
\({I}_{1}^{\mathrm{ult}}=\frac{R(p)}{\alpha}=\frac{{\sigma}_{Y}^{\mathrm{ult}}}{\alpha}\)
\({\varepsilon}_{v}^{\mathrm{pult}}=3\alpha {p}_{\mathrm{ult}}\)
\({\varepsilon}_{v}^{\mathrm{ult}}=\frac{{I}_{1}^{\mathrm{ult}}}{3K}+{\varepsilon}_{v}^{\mathrm{pult}}\)
Déformation entre la limite élastique et la déformation ultime#
On calcule d’abord la déformation plastique cumulée.
En combinant les équations (), (), () et () avec \(F(\sigma ,p)=0\) pour l’écrouissage linéaire on a :
En combinant les équations (), (), () et () avec \(F(\sigma ,p)=0\) pour l “écrouissage parabolique on arrive à l’équation de dégréé 2 :
On utilise alors les équations () () pour trouver la déformation plastique \({\varepsilon}_{v}^{p}\) et la trace des contraintes \({I}_{1}\) .
Si on fait décharger le matériau de façon élastique jusqu’à contrainte nulle, on retrouve une déformation résiduelle égale à la déformation plastique ; il faut par contre charger le matériau en compression pour obtenir un déformation totale nulle. Cette deuxième branche est aussi élastique, car le matériau de Drücker-Prager ne peut pas plastifier en état de compression hydrostatique. Dans ce dernier cas, la trace des contraintes, négative, est :
Déformation supérieure à la déformation ultime#
On trouve facilement toutes les quantités d’intérêt, car la trace de contraintes est connue a priori et égale à \({I}_{1}^{\mathrm{ult}}\) .
\({\varepsilon}_{v}^{p}={\varepsilon}_{v}-\frac{{I}_{1}^{\mathrm{ult}}}{3K}\)
\(p=\frac{{\varepsilon}_{v}^{p}}{3\alpha }\)
Grandeurs et résultats de référence#
Le module de compressibilité \(K\) est :
\(K=\frac{E}{3(1-2\nu )}=2000\mathrm{MPa}\)
Déformation à la limite élastique#
Pour les deux modélisations on trouve facilement :
\({I}_{1}^{\mathrm{el}}=30\mathrm{MPa}\)
\({\varepsilon}_{v}^{\mathrm{el}}=0,005\)
Déformation ultime#
Pour les deux modélisations on trouve :
\({I}_{1}^{\mathrm{ult}}=50\mathrm{MPa}\)
\({\varepsilon}_{v}^{\mathrm{pult}}=0,024\)
\({\varepsilon}_{v}^{\mathrm{ult}}\approx 0,03233\)
Déformation égale à 0,018 et décharge à déformation nulle#
Cette valeur de déformation \({\varepsilon}_{v1}=0,018\) est supérieure à la limite élastique \({\varepsilon}_{v}^{\mathrm{el}}\) et inférieure à \({\varepsilon}_{v}^{\mathrm{ult}}\) . On calcule d’abord la déformation plastique cumulée avec les équations () et (), puis la déformation plastique et la trace des contraintes :
écrouissage linéaire :
\({p}_{1}=\frac{3KA{\varepsilon}_{\mathrm{v1}}-{\sigma}_{Y}}{9K{\alpha}^{2}+h}\approx 0,019\)
\({\varepsilon}_{v1}^{p}=3\alpha {p}_{1}=0,0114\)
\({I}_{1}^{1}=3K({\varepsilon}_{v1}-{\varepsilon}_{v1}^{p})\approx 39,51\mathrm{MPa}\)
écrouissage parabolique :
\({p}_{1}\approx 0.0192\)
\({\varepsilon}_{v1}^{p}=3\alpha {p}_{1}\approx 0.0115\)
\({I}_{1}^{1}=3K({\varepsilon}_{v1}-{\varepsilon}_{v1}^{p})\approx 38.956\mathrm{MPa}\)
La trace des contraintes à déformation nulle est :
écrouissage linéaire :
\({I}_{1}^{\mathrm{1c}}=-3K{\varepsilon}_{v1}^{p}\approx -68,49\mathrm{MPa}\)
écrouissage parabolique :
\({I}_{1}^{\mathrm{1c}}=-3K{\varepsilon}_{v1}^{p}\approx -69,044\mathrm{MPa}\)
En effet, la différence entre le cas parabolique et linéaire est très faible.
Chargement jusqu’à déformation égale à 0,045 et 0,06#
On recharge le matériau jusqu’aux valeurs de déformation \({\varepsilon}_{v2}=0,045\) et \({\varepsilon}_{v3}=0,06\) , supérieures à \({\varepsilon}_{v}^{\mathrm{ult}}\) .
Les résultats sont les mêmes pour les deux modélisations.
Pour \({\varepsilon}_{v2}=0,045\) :
\({\varepsilon}_{v2}^{p}={\varepsilon}_{v2}-\frac{{I}_{1}^{\mathrm{ult}}}{3K}\approx 0,03667\)
\({p}_{2}=\frac{{\varepsilon}_{v2}^{p}}{3\alpha }\approx 0,0611\)
Suite à la décharge élastique (jusqu’à contrainte nulle), on retrouve \({\varepsilon}_{v}={\varepsilon}_{v2}^{p}\) , \(p={p}_{2}\) .
Pour \({\varepsilon}_{v3}=0,06\) :
\({\varepsilon}_{v3}^{p}={\varepsilon}_{v3}-\frac{{I}_{1}^{\mathrm{ult}}}{3K}\approx 0,051667\)
\({p}_{3}=\frac{{\varepsilon}_{v3}^{p}}{3\alpha }\approx 0,0861\)
Courbes contrainte-déformation#
Dans les Figures () et () on représente la courbe (\({\varepsilon}_{v},{I}_{1}\) ) pour l’écrouissage linéaire et parabolique. En rouge sont les points testés par le cas-test.
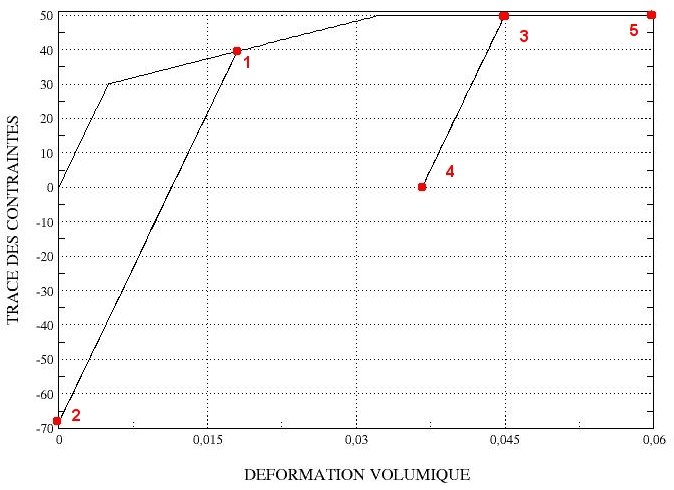
Figure 2.2.5-a : courbes contrainte-déformation pour écrouissage linéaire.
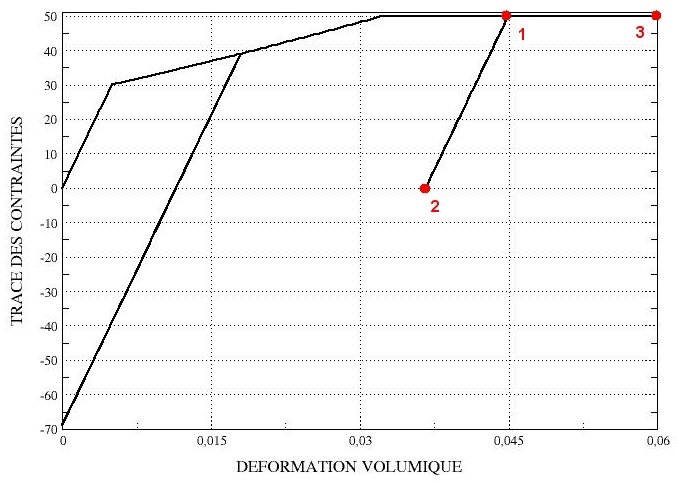
Figure 2.2.5-b : courbes contrainte-déformation pour écrouissage parabolique.
Incertitudes sur la solution#
La solution est analytique.
Références bibliographiques#
Document [R3.01.16], Intégration du comportement mécanique élasto-plastique de Drücker-Prager DRUCK_PRAGER et post-traitements. Manuel de référence Code_Aster.
Modélisation A#
Caractéristiques de la modélisation#
Le test est effectué sur un point matériel avec la commande SIMU_POINT_MAT. On travaille à déformations imposées.
L’écrouissage est linéaire.
Grandeurs et résultats de référence#
Point sur la |
Quantité vérifiée |
Valeur de référence |
Type de référence |
Tolérance (relatif) |
1 |
Trace des contraintes |
\({I}_{1}^{1}=39,51\mathrm{MPa}\) |
ANALYTIQUE |
\({10}^{-6}\) % |
2 |
Trace des contraintes |
\({I}_{1}^{\mathrm{1c}}=-68,49\mathrm{MPa}\) |
ANALYTIQUE |
\({10}^{-6}\) % |
3 ou 4 |
Partie sphérique de la déformation plastique |
\({\varepsilon}_{v2}^{p}=0,03667\) |
ANALYTIQUE |
\({10}^{-6}\) % |
3 ou 5 |
Trace de contraintes |
\({I}_{1}^{\mathrm{ult}}=50\mathrm{MPa}\) |
ANALYTIQUE |
\({10}^{-6}\) % |
5 |
Partie sphérique de la déformation plastique |
\({\varepsilon}_{v3}^{p}=0,051667\) |
ANALYTIQUE |
\({10}^{-6}\) % |
Modélisation B#
Caractéristiques de la modélisation#
Le test est effectué sur un point matériel avec la commande SIMU_POINT_MAT. On travaille à déformations imposées.
L’écrouissage est parabolique.
Grandeurs et résultats de référence#
Point sur la |
Quantité vérifiée |
Valeur de référence |
Type de référence |
Tolérance (relatif) |
1 ou 2 |
Partie sphérique de la déformation plastique |
\({\varepsilon}_{v2}^{p}=0,03667\) |
ANALYTIQUE |
\({10}^{-6}\) % |
1 ou 3 |
Trace de contraintes |
\({I}_{1}^{\mathrm{ult}}=50\mathrm{MPa}\) |
ANALYTIQUE |
\({10}^{-6}\) % |
3 |
Partie sphérique de la déformation plastique |
\({\varepsilon}_{v3}^{p}=0,051667\) |
ANALYTIQUE |
\({10}^{-6}\) % |
Synthèse des résultats#
Les résultats du cas-test sont satisfaisants, Code_Aster reproduit les résultats analytiques avec une précision élevée.