r5.04.04 Modélisation non locale à gradients d’endommagement nodal GVNO#
Résumé
On présente ici la modélisation non locale à gradient d’endommagement nodal intitulée GVNO dans Code_Aster, issue des travaux de thèse de J. Beaurain. Cette modélisation peut être vue comme une simplification de la modélisation non locale à gradient de variable interne GRAD_VARI.
Les modélisations non locales de type GVNO sont disponibles en 3D (3D_GVNO), axisymétrique (AXIS_GVNO) et déformations planes (D_PLAN_GVNO).
L’utilisation de GVNO est très simple, puisqu’il suffit de préciser la modélisation X_GVNO dans AFFE_MODELE, de préciser une longueur caractéristique sous le mot-clé NON_LOCAL dans DEFI_MATERIAU, et de vérifier que la loi de comportement qu’on souhaite utiliser est bien disponible en version non locale.
On présente l’écriture et le traitement numérique de ce modèle.
Choix des éléments finis#
On se trouve en présence de deux inconnues nodales: les déplacements \(u\) et l’endommagement \(\alpha\) .
On considère des fonctions de formes \({P}^{2}\) pour \(u\) et \({P}^{1}\) pour \(\alpha\) .
Les éléments quadratiques, TRIA6 et QUAD8 pour le 2D, TETRA10, PENTA15 et HEXA20 pour le 3D, ont été développés. Les composantes du déplacement sont affectées à tous les nœuds de l’élément alors que les composantes d’endommagement ne sont affectées qu’aux nœuds sommets. Pour plus de clarté, l’élément TRIA6 est représenté ci-dessous:
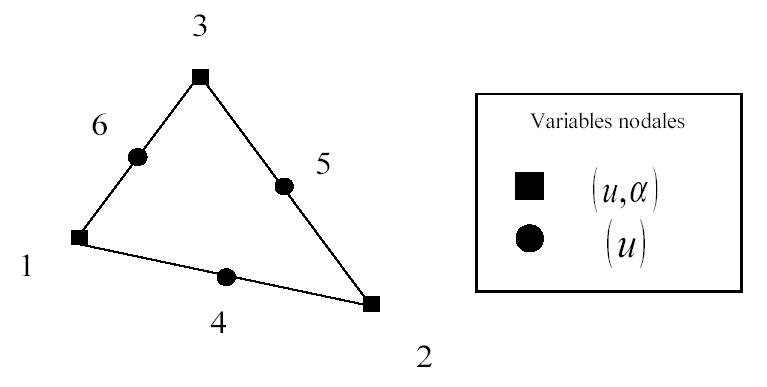
|
On utilise les familles de points de Gauss des éléments linéaires correspondants, ce qui se traduit par une sous-intégration sur les déplacements. L’utilisation des familles de points de Gauss des éléments quadratiques impliquerait une sur-intégration pour \(\alpha\) provoquant des oscillations intempestives.
Méthodes de résolution#
Si l’on exclut la condition unilatérale d’irréversibilité de l’endommagement, l’algorithme de Newton tel qu’il est programmé actuellement dans le code suffit à la résolution. Dans notre cas, on doit tenir compte de la dégradation du matériau. Concernant la modélisation GRAD_VARI, cette contrainte est gérée localement, en chaque point de Gauss, par projection sur l’ancienne valeur s’il s’agit d’un comportement de décharge. La résolution du critère n’étant plus locale avec GVNO, il n’est plus possible d’effectuer ce type de projection et on doit imposer l’irréversibilité au niveau global.
Deux méthodes de résolution peuvent alors être envisagées avec cette modélisation. Il est soit possible de travailler avec un Newton classique, en assurant la projection des incréments d’endommagement négatifs. Soit avec un algorithme «sécante» qui consiste à mettre à 0 les blocs extra-diagonaux et donc à considérer les variables de déplacement et d’endommagement indépendantes. Ce qui est équivalent à l’algorithme de minimisation alternée dans le cas de lois de comportement quadratiques en déplacement et en endommagement. On assure cette fois l’irréversibilité par projection des incréments d’endommagement négatifs.
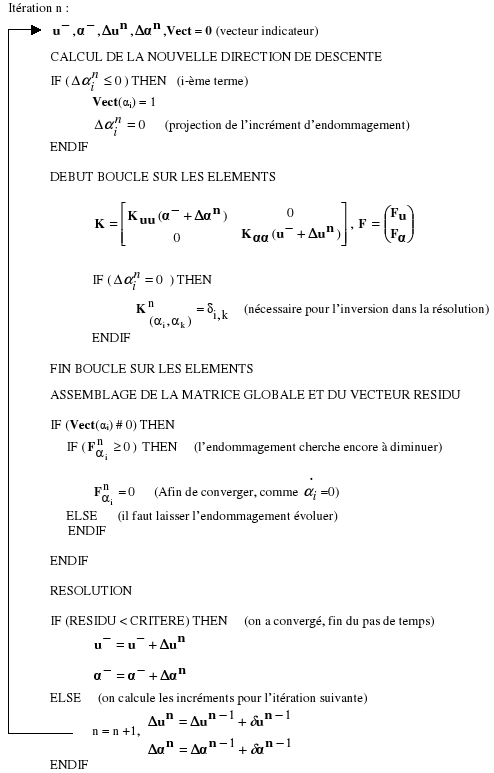
Dans les deux cas, la résolution s’effectue en trois étapes :
On s’intéresse dans un premier temps aux incréments d’endommagement à chaque itération. Lorsque l’incrément est négatif, on le projette à 0, de sorte à respecter l’irréversibilité.
On construit la matrice de rigidité (seulement les blocs diagonaux dans le cas de la sécante) et les forces internes.
On défini les résidus d’endommagement par la relation de complémentarité :
\({R}_{n}^{\alpha}={F}^{\alpha}{\mid}_{n}\Delta {\alpha}_{n}\)
Avec respectivement : \({F}^{\alpha}{\mid}_{n}\ge 0\) et \(\Delta {\alpha}_{n}\ge 0\)
Cela implique de regarder le signe des forces internes associés aux degrés de liberté d’endommagement projetés à l’étape 1. En effet, si celui ci est négatif on ne respecte pas l’ensemble des conditions imposées et l’on doit garder la force interne comme résidu. Si celui ci est positif le résidu est alors nul puisque l’incrément est nul.
Plus précisément, la méthode de résolution, dans le cas de la sécante (matrice diagonale par blocs), peut se présenter de la façon suivante :
Modélisations disponibles#
Ces différents éléments sont utilisés dans trois types de modélisations:
Calcul 2D en déformations planes: |
D_PLAN_GVNO |
Calcul 2D en axisymétrique: |
AXIS_GVNO |
Calcul 3D: |
3D_GVNO |
Le mode contraintes planes n’est pas encore disponible.
Lois de comportement disponibles avec les modélisations GVNO#
La loi de comportement actuellement disponible dans la version non locale à gradient d’endommagement nodal est la suivante :
ENDO_CARRE |
Loi de comportement d’endommagement régularisée quadratique ENDO_CARRE(cf [R5.03.26]) |
Conseils/Procédure pour la mise en oeuvre d’une nouvelle loi de comportement à gradients d’endommagement#
L’ajout d’une nouvelle loi de comportement est très simple. Il suffit juste de renseigner les dérivées premières et secondes calculées localement et indépendamment de la partie en gradient qui est gérée de façon générique.
Conseils sur l’utilisation de GVNO#
Il est préférable d’utiliser la modélisation GVNO avec la méthode de Newton traditionnelle dans le cas de calculs d’endommagement qui ne présentent pas de fortes instabilités (snap-back). En effet, la méthode de Newton est plus rapide mais elle ne permet pas franchir les snap-backs sans l’utilisation d’un algorithme supplémentaire, type pilotage, qui n’a pas encore été développé ici. Dans le cas contraire, il est préférable d’utiliser la méthode «sécante», en déclenchant un PAS_MINI_ELAS suffisamment grand pour s’assurer que l’on vérifie la condition à chaque pas de temps. Cette méthode permettant de franchir les instabilités et donc de toujours converger vers une solution. Toutefois, le nombre d’itérations nécessaires à la convergence peuvent être assez important (ex : 800 itérations). Il faut donc autoriser un nombre maximal d’itérations important dans le fichier de commande (1200 environ). La rapidité de la convergence dépend de la loi utilisée et également de la discrétisation temporelle. Des pas de temps trop grands peuvent conduire à une bien trop difficile convergence. Cette méthode est très efficace pour les lois de comportement quadratiques en endommagement et en déplacements puisque l’on travaille alors avec un algorithme de minimisation alternée robuste.
Fonctionnalités et vérifications#
Inventaire des tests en support au développement :
Bibliographie#
LORENTZ E. : “Lois de comportement à gradients de variables internes: construction, formulation variationnelle et mise en œuvre numérique”, Thèse de doctorat de l’université Paris 6, 27 avril 1999.
HALPHEN B., NGUYEN Q. S. : “Sur le matériaux standards généralisés”, Journal de Mécanique, Vol. 14, No 1, 1975.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
J.BEAURAIN, K.KAZYMYRENKO EDF-R&D/AMA |
Texte initial |