r7.02.18 Élément Hydromécanique couplé avec XFEM#
Résumé:
Dans ce document nous présentons la formulation d’un nouveau type d’éléments finis. Il s’agit d’un élément hydromécanique traversé par une discontinuité (une interface ou une fissure) dont la conception repose sur l’utilisation de la méthode des éléments finis étendue dans la formulation des équations discrétisées du modèle poro-mécanique pour un milieu poreux saturé en fluide.
Présentation du problème#
Définition du domaine d’étude#
Soit \(\Omega \subset {\mathrm{ℝ}}^{d}\) avec \(d\in \lbrace 2,3\rbrace\) un domaine traversé entièrement par une fissure ou une interface perméable. Soit \(n\) la normale extérieure à la frontière \(\partial \Omega\) du domaine, et \({n}_{c}\) celle de l’interface \({\Gamma}_{c}\) .
Il est possible de décomposer:
la frontière du domaine \(\Omega\) en \(\partial \Omega ={\Gamma}_{u}\cup {\Gamma}_{t}\cup {\Gamma}_{p}\cup {\Gamma}_{F}\) où sont imposées les conditions aux limites (de type Dirichlet et Neumann) pour l’hydrodynamique (sur \({\Gamma}_{p}\) et \({\Gamma}_{F}\) ) et pour la mécanique (sur \({\Gamma}_{u}\) et \({\Gamma}_{t}\) ),
l’interface en \({\Gamma}_{c}={\Gamma}_{f}\cup {\Gamma}_{1}\cup {\Gamma}_{2}\) où \({\Gamma}_{1}\) et \({\Gamma}_{2}\) représentent les lèvres de la discontinuité. On impose des conditions de flux sur \({\Gamma}_{1}\) , \({\Gamma}_{2}\) et \({\Gamma}_{f}\) et des efforts surfaciques cohésifs sur \({\Gamma}_{1}\) et \({\Gamma}_{2}\) .
La donne une représentation symbolique des conditions imposées sur la frontière du domaine.
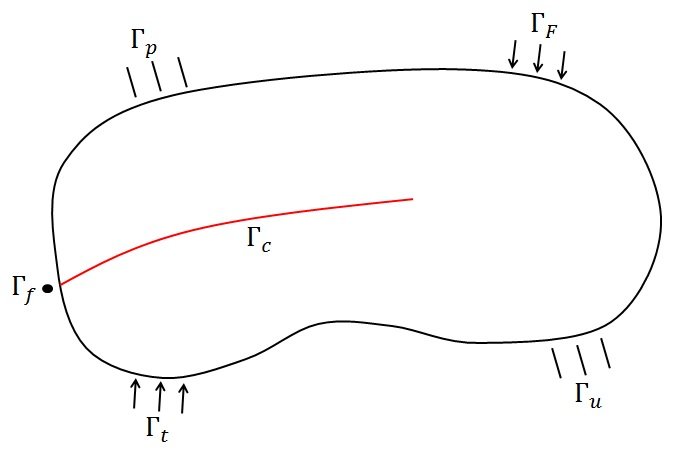
Figure 2.1-1: Imposition des conditions aux limites
Hypothèses et notations#
On considère un milieu poreux saturé en liquide (en général de l’eau). La loi de couplage associée dans Code_Aster est donc LIQU_SATU (pour plus de détails se reporter à la notice du modèle THM [U2.04.05]). D’autre part il existe un écoulement longitudinal de fluide au niveau de l’interface. En supposant que celle-ci est perméable, les échanges de fluide ont lieu entre le massif (partie de \(\Omega\) qui n’est pas l’interface) et l’interface. Ils sont représentés sur la .
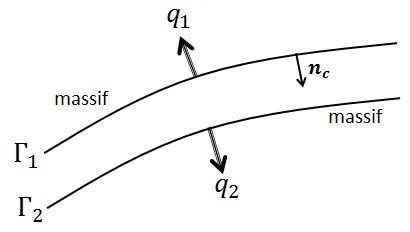
Figure 2.2-1: Orientation des échanges entre le massif et la discontinuité
\({q}_{1}\) et \({q}_{2}\) sont les flux dus aux échanges entre le massif et l’interface, et sont exprimés en \({\mathit{kg.m}}^{\text{-2}}.{s}^{\text{-1}}\) . Ces flux proviennent de l’interface et sont dirigés respectivement vers les parties supérieures et inférieures du massif au niveau des lèvres \({\Gamma}_{1}\) et \({\Gamma}_{2}\) de l’interface. Ils sont dirigés de la discontinuité vers le massif.
Le champ de pression au niveau du massif est noté \(p\) et celui au niveau de l’interface est noté \({p}_{f}\) (champ induit par le fluide circulant au niveau de l’interface). Le champ de déplacements est noté \(u\) et le saut de déplacement au niveau de l’interface est noté \(⟦u⟧\) .
Soit \({P}_{1}\) un point de \({\Gamma}_{1}\) et \({P}_{2}\) un point de \({\Gamma}_{2}\) et \({n}_{c}={n}_{c}^{1}\) la normale extérieure à \({\Gamma}_{1}\) et \({n}_{c}^{2}\) la normale extérieure à \({\Gamma}_{2}\) . Le saut de déplacement normal (pris négatif ou nul en ouverture et positif en interpénétration des lèvres) est donc défini de la manière suivante:
\(⟦u⟧.{n}_{c}=(u({P}_{1})-u({P}_{2})).{n}_{c}⩽0\)
Sur la , on indique les conventions adoptées pour la prise en compte du saut de déplacement au niveau de l’interface.
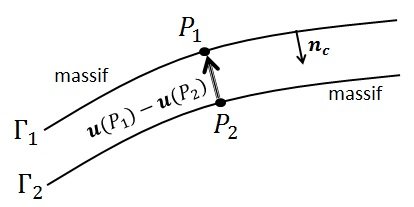
Figure 2.2-2: Définition du saut de déplacement au niveau de la discontinuité
Pour le massif, comme pour l’interface, l’hypothèse des contraintes effectives est prise en considération. Ainsi:
la contrainte totale dans le massif est notée \(\sigma\) ,
la contrainte totale (liée aux efforts cohésifs) au niveau de l’interface est notée \({t}_{c}\) .
L’hypothèse des petites perturbations est admise. D’autre part on considère que les grandeurs mécanique et hydraulique sont isotropes.
Équations constitutives du modèle HM-XFEM#
Équationspour lamécanique#
Équation d’équilibre (cas du massif)#
Dans le cas du massif l’équation de conservation de la quantité de mouvement (en tenant compte des efforts volumiques) peut se mettre sous la forme:
\(\text{Div}(\sigma )+r{F}^{m}=0\)
avec:
\(\sigma ={\sigma}^{'}-\mathit{bp}1\) (sous l’hypothèse des contraintes effectives) où \(b\) est le coefficient de Biot,
\(r\) la masse volumique homogénéisée telle que dans le cas saturé \(r={r}_{0}+{m}_{w}\) où \({r}_{0}\) est la masse volumique homogénéisée dans la configuration de référence et \({m}_{w}\) les apports massiques en eau,
\(r{F}^{m}\) représentent les efforts volumiques agissant sur \(\Omega\) (dans la pratique il s’agit des forces de gravité).
Modèle de zones cohésives (cas de l’interface)#
Afin de prendre en compte la propagation de la discontinuité, l’irréversibilité de la fracturation et la non-interpénétration des lèvres de la discontinuité, on choisit de modéliser le comportement de l’interface ou de la fissure à l’aide d’une loi cohésive.
Pour plus d’informations concernant l’établissement de ces lois, l’utilisateur peut se reporter à la documentation [R7.02.11]. En ce qui nous concerne, au niveau de la discontinuité, il est possible de distinguer 3 zones:
une zone complètement ouverte, au niveau de laquelle la contrainte totale sur les lèvres de la discontinuité est égale à \({p}_{f}{n}_{c}\) sur \({\Gamma}_{2}\) et égale à \(-{p}_{f}{n}_{c}\) sur \({\Gamma}_{1}\) . Dans cette zone la valeur de la contrainte est due principalement au fluide y circulant,
une zone cohésive (ou Fracture Processing Zone (FPZ)) dont l’ouverture dépend de la valeur de la contrainte totale qui est alors égale à \({t}_{c}={t}_{c}^{'}-{p}_{f}n\) , \(n\) étant la normale extérieure à la surface concernée \({\Gamma}_{1}\) ou \({\Gamma}_{2}\) . Au delà d’une certaine ouverture \({w}_{c}\) , la contrainte correspond à celle de la zone précédente,
et une zone saine adhérente au niveau de laquelle les lèvres de la discontinuité sont en contact et ne s’interpénètrent pas.
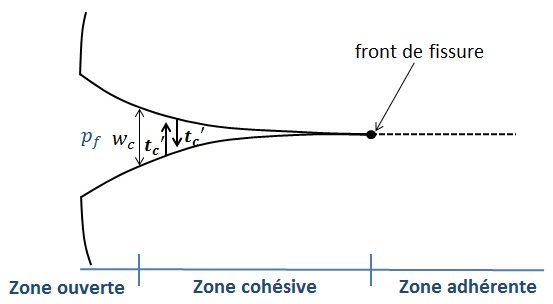
Figure 3.1.2-1: Répartition des contraintes au niveau de la discontinuité Sur la on situe les différentes zones de contraintes associées au modèle de zones cohésives. Le front de fissure est alors naturellement localisé à la frontière entre la zone cohésive et la zone adhérente.
La loi de comportement utilisée pour les lois cohésives prend la forme d’une relation adoucissante entre la contrainte cohésive \({t}_{c}'\) et le saut de déplacement \(⟦u⟧\) au niveau des lèvres de la discontinuité.
Ainsi on pose:
\({t}_{c}'\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\frac{\partial \psi }{\partial ⟦u⟧}\)
avec \(\psi\) l’énergie de surface, dont l’expression dépend de la loi cohésive utilisée.
La loi cohésive adoptée pour les éléments XFEM hydromécaniques est la loi CZM_LIN_MIX détaillée dans [R7.02.19]. Il s’agit d’une loi cohésive non régularisée (donc avec une pente initiale infinie). \({\sigma}_{c}\) est la contrainte critique à partir de laquelle l’endommagement commence dans la zone cohésive. \({G}_{c}=\frac{{\sigma}_{c}{w}_{c}}{2}\) correspond à la quantité d’énergie à fournir pour rompre totalement une unité de surface.
Figure 3.1.2-2: Loi cohésive mixte.
Conditions aux limites pour la mécanique#
L’écriture des conditions aux limites pour la mécanique sur la frontière du domaine \(\Omega\) et au niveau de l’interface s’écrivent:
Conditions aux limites pour la mécanique |
|
Équations pour l’hydrodynamique#
Équation de conservation de la masse (cas du massif)#
Dans le cas du massif l’équation de conservation de la masse se met sous la forme:
\(\frac{\partial {m}_{w}}{\partial t}\text{}+\text{}\text{Div}(M)=0\)
avec:
\({m}_{w}\) les apports massiques (par unité de volume)exprimésen \({\mathit{kg.m}}^{\text{-3}}\) ,
\(M\) les flux massiques exprimésen \({\mathit{kg.m}}^{\text{-2}}.{s}^{\text{-1}}\) .
Équation de conservation de la masse (cas de l’interface)#
Dans le cas de l’interface l’équation de conservation de la masse se met sous la forme:
\(\frac{\partial w}{\partial t}\text{}+\text{}\text{Div}(W)=0\)
avec:
\(w\) les apports massiques (par unité de surface)dans la fissure exprimés en \({\mathit{kg.m}}^{\text{-2}}\) ,
\(W\) les flux massiquesdans la fissure exprimés en \({\mathit{kg.m}}^{\text{-1}}.{s}^{\text{-1}}\) ,
Conditions aux limites pour l’hydrodynamique#
L’écriture des conditions aux limites pour l’hydrodynamique sur la frontière du domaine \(\Omega\) et au niveau de l’interface permet d’obtenir:
Conditions aux limites pour l’hydrodynamique |
|
Une condition aux limites supplémentaire à prendre en compte est la continuité de la pression \({p}_{f}\) au niveau de chacune des lèvres de l’interface. Cette condition est nécessaire du fait de la très faible épaisseur de l’interface. Elle se traduit par la relation linéaire suivante:
\({p}^{\inf}={p}_{f}\) sur \({\Gamma}_{1}\)
\({p}^{\sup}={p}_{f}\) sur \({\Gamma}_{2}\)
avec:
\({p}^{\sup}\) la pression de fluide au-dessus de l’interface (champ enrichi par XFEM),
\({p}^{\inf}\) la pression de fluide en-dessous de l’interface (champ enrichi par XFEM).
Équations du modèle poro-mécanique#
Dans cette partie on ne fait que rappeler les équations utiles du modèle poro-mécanique développé dans la documentation [R7.01.11].
Expression des apports massiques#
Cas du massif
Les apports massiques peuvent être mis sous la forme (avec \({S}_{\mathit{lq}}=1\) ):
\({m}_{w}=\rho \varphi (1+{\epsilon}_{v})\)
avec:
\(\rho ,\varphi\) respectivement la masse volumique de l’eau (en \({\mathit{kg.m}}^{\text{-3}}\) ), la variable de porosité eulérienne,
\({\epsilon}_{v}=\mathit{Tr}(\epsilon )=\mathit{Tr}({\nabla}_{s}u)\) la déformation volumique (où \(\mathit{Tr}\) est l’application linéaire trace).
Cas de l’interface
Les apports massiques peuvent se mettre sous la forme:
\(w=\rho ⟦u⟧.{n}_{c}\)
avec:
\(\rho\) respectivement la masse volumique de l’eau,
\(⟦u⟧.{n}_{c}\) l’ouverture normale de la discontinuité (en \(m\) ).
Expression des flux massiques#
Cas du massif
Le flux massique dans le massif suit la loi de Darcy. Ainsi on pose:
\(M=\lambda \rho (-\nabla p+\rho {F}^{m})\)
avec \(\lambda =\frac{{K}^{int}}{{\mu}^{}}\) la mobilitédu liquide où \({K}^{int}\) est la perméabilité intrinsèque du massif (en \({m}^{2}\) )et \(\mu\) la viscosité dynamique du fluide (en \(\mathit{Pa.s}\) ).
Remarque:
L’expression de la mobilité fait intervenir en réalité la perméabilité relative du fluide \({k}_{w}^{\text{rel}}({S}_{\text{w}})\) (qui est une fonction de la saturation en eau et est donnée par la loi de Mualem/Van Genuchten [1 *0]) c’est-à-dire* \(\lambda =\frac{{K}^{int}{k}_{w}^{\text{rel}}}{{\mu}^{}}\) *.* Étant donné que le milieu est saturé ( \({S}_{\text{w}}=1\) ), la perméabilité relative à l’eau est donc égale à \(1\) *.*
Cas de l’interface
Le flux massique dans la discontinuité peut être écrit en fonction de la loi cubique [11] (on néglige les effets de la pesanteur). Ainsi on pose:
\(W=-\frac{\rho {(⟦u⟧.{n}_{c})}^{3}}{12\mu }\nabla {p}_{f}\)
avec \(\mu\) la viscosité dynamique du fluide (en \(\mathit{Pa.s}\) ).
Evolution de la variable de porosité#
L’évolution de la variable de porosité (eulérienne) caractérisant le massif est donnée dans le cas saturé isotherme par:
\(d\varphi =(b-\varphi )\left(d{\epsilon}_{v}\text{}+\text{}\frac{\mathit{dp}}{{K}_{s}}\right)\)
avec \({K}_{s}\) le module de compressibilité de la matrice solide (en \(\mathit{Pa}\) )et \(b\) le coefficient de Biot.
Evolution de la masse volumique du fluide#
Cas du massif
L’évolution de la masse volumique du fluide dans le massif est donnée dans le cas saturé isotherme par:
\(\frac{d\rho }{{\rho}^{}}\text{}=\text{}\frac{\text{dp}}{{K}_{w}^{}}\)
avec \({K}_{w}\) le coefficient de compressibilité du liquide (en \(\mathit{Pa}\) ).
Cas de l’interface
L’évolution de la masse volumique du fluide au niveau de l’interface est donnée dans le cas saturé isotherme par:
\(\frac{d\rho }{{\rho}^{}}\text{}=\text{}\frac{{\text{dp}}_{f}}{{K}_{w}^{}}\)
Dérivée des apports massiques#
Étant donné que la différentielledes apports massiquesintervientdans l’expression de l’opérateur tangent associé au système linéarisé (voir § 6 ), son expression est rappelée icidans le cas saturé isotherme.
Cas du massif
Tout d’abord la différentielle des apportsmassiques peut s’écrire:
\({\mathit{dm}}_{w}=\rho \varphi d{\epsilon}_{v}+\rho (1+{\epsilon}_{v})d\varphi +\varphi (1+{\epsilon}_{v})d\rho\)
Compte tenu de l’hypothèse des petites perturbations, par souci de simplification, on suppose que \((1+{\epsilon}_{v})\approx 1\) . Au final (en remplaçant \(d\varphi\) et \(d\rho\) par leurs expressions):
\(d{m}_{w}=\rho bd{\epsilon}_{v}+\left(\left(\frac{\rho (b-\varphi )}{{K}_{s}^{}}+\frac{\rho \varphi }{{K}_{w}^{}}\right)\right)\mathit{dp}\)
Cas de l’interface
La différentielle des apportsmassiques s’écrit:
\(\mathit{dw}=\rho d(⟦u⟧\cdot {n}_{c})+(⟦u⟧\cdot {n}_{c})\rho \text{}\frac{d{p}_{f}}{{K}_{w}^{}}\)
Dérivée des flux massiques#
Étant donné que la différentielledes fluxmassiquesintervientdans l’expression de l’opérateur tangent associé au système linéarisé (voir § 6 ) son expression est rappelée icidans le cas saturé isotherme.
Cas du massif
La différentielle des flux massiques dans le cas du massif s’écrit:
\(dM=\left(\frac{M}{{\rho}^{\rbrace }+\rho \lambda {F}^{m}\right)\rho \text{}\frac{dp}{{K}_{w}^{}}+\frac{M}{{\lambda}^{\rbrace }d\lambda -\rho \lambda d\left(\nabla p\right)\)
Cas de l’interface
La différentielle des flux massiques dans le cas de l’interface s’écrit:
\(dW\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\left(\frac{W}{{\rho}^{}}\right)\rho \text{}\frac{dp}{{K}_{w}^{}}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\frac{\rho}{12\mu }\nabla {p}_{f}\left(3{\left(⟦u⟧\cdot {n}_{c}\right)}^{2}\right)d\left(⟦u⟧\cdot {n}_{c}\right)\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\frac{\rho {(⟦u⟧\cdot {n}_{c})}^{3}}{12\mu }d\left(\nabla {p}_{f}\right)\)
Formulation variationnelle#
Avant de donner l’expression des formulations variationnelles des équations d’équilibre présentées ci-dessus, nous allons donner la définition des espaces d’approximation des champs de déplacements, de pressions (du massif et de l’interface), des flux \({q}_{1}\) et \({q}_{2}\) et des multiplicateurs de Lagrange \(\lambda ,\mu ` et du saut de déplacement :math:`w\) utiles pour le modèle de zone cohésive:
l’espace des champs de déplacements cinématiquement admissibles sur la frontière du domaine \(\Omega\) est tel que:
\({U}_{0}=\lbrace {u}^{\text{*}}\in {H}_{1}(\Omega )/{u}^{\text{*}}\text{}\text{discontinu à travers}{\Gamma}_{c},{u}^{\text{*}}=0\text{}\text{sur}{\Gamma}_{u}\rbrace\)
l’espace des champs de pression admissibles sur la frontière du domaine \(\Omega\) est tel que:
\({P}_{0}=\lbrace {p}^{\text{*}}\in {H}_{1}(\Omega )/{p}^{\text{*}}\text{}\text{discontinue à travers}{\Gamma}_{c},{p}^{\text{*}}=0\text{}\text{sur}{\Gamma}_{p}\rbrace\)
l’espace des inconnues \({q}_{1}\) et \({q}_{2}\) est tel que:
\({Q}_{1}=\lbrace {q}_{1}^{\text{*}}\in {H}^{-1/2}({\Gamma}_{c})/{q}_{1}^{\text{*}}\in {\Gamma}_{1}\rbrace\) et \({Q}_{2}=\lbrace {q}_{2}^{\text{*}}\in {H}^{-1/2}({\Gamma}_{c})/{q}_{2}^{\text{*}}\in {\Gamma}_{2}\rbrace\)
l’espace des inconnues de pression \({p}_{f}\) est tel que:
\({F}_{0}=\lbrace {p}_{f}^{\text{*}}\in {H}^{-1/2}({\Gamma}_{c})/{p}_{f}^{\text{*}}\text{continue sur}{\Gamma}_{c}\rbrace\)
l’espace des inconnues des multiplicateurs de Lagrange \(\lambda ,\mu ` et du saut de déplacement :math:`w\) est tel que:
\({L}_{0}=\lbrace {\lambda}^{\text{*}}\in {H}^{-1/2}({\Gamma}_{c})/{\lambda}^{\text{*}}\text{continue sur}{\Gamma}_{c}\rbrace\)
Formulation faible du problème mécanique#
Comme expliqué dans [R7.02.19], dans le cadre de la formulation de type «mortier» pour le modèle de zone cohésive, le saut de déplacement \(w\) est introduit comme une nouvelle inconnue du problème, qui ne sera pas discrétisé comme \(⟦u⟧\) mais en sera une projection sur un espace réduit \({M}_{h}\) (voir § 5.2.2 ). L’énergie totale du problème s’écrit alors:
\(E(u,\lambda ,w)=\frac{1}{2}{\int}_{\Omega}{\varepsilon}(u):C:{\varepsilon}(u)d\Omega -{\int}_{{\Gamma}_{t}}t\cdot ud{\Gamma}_{t}+{\int}_{{\Gamma}_{c}}\Pi \left(w,\lambda \right)d{\Gamma}_{c}\)
\(\Pi (w,\lambda )\) est la densité d’énergie de surface et \(t\) les efforts surfaciques imposés sur \({\Gamma}_{t}\) . Le multiplicateur de Lagrange \(\lambda ` sera discrétisé sur le même espace que :math:`w\) (confer [R7.02.19]).
La solution du problème continu consiste en une minimisation sous contraintes d’égalité \(\left(u,w,\lambda \right)=\underset{{w}^{\text{*}}=⟦{u}^{\text{*}}⟧}{\mathit{argmin}}E\left({u}^{\text{*}},{\lambda}^{\text{*}},{w}^{\text{*}}\right)\) . Nous pouvons écrire le Lagrangien associé comme:
\(L(u,w,\lambda ,\mu )=\frac{1}{2}{\int}_{\Omega}{\varepsilon}(u):C:{\varepsilon}(u)d\Omega -{\int}_{{\Gamma}_{t}}t\cdot ud{\Gamma}_{t}+{\int}_{{\Gamma}_{c}}\Pi (w,\lambda )d{\Gamma}_{c}+{\int}_{{\Gamma}_{c}}\mu \cdot \left(⟦u⟧-w\right)d{\Gamma}_{c}\)
Le multiplicateur de Lagrange \(\mu ` sera également discrétisé sur l'espace réduit :math:`{M}_{h}\) .L’écriture des conditions d’optimalité de ce Lagrangien conduit à la formulation variationnelle suivante:
Équation d’équilibre |
\(\forall {u}^{\text{*}}\in {U}_{0,}{\int}_{\Omega}\sigma (u):{\varepsilon}({u}^{\text{*}})d\Omega -{\int}_{{\Gamma}_{t}}t\cdot {u}^{\text{*}}d{\Gamma}_{t}+{\int}_{{\Gamma}_{c}}\mu \cdot ⟦{u}^{\text{*}}⟧d{\Gamma}_{c}=0\) |
Projection du saut de déplacement |
\(\forall {\mu}^{\text{*}}\in {L}_{0},{\int}_{{\Gamma}_{c}}\left(⟦u⟧-w\right)\cdot {\mu}^{\text{*}}d{\Gamma}_{c}=0\) |
Expression de la force cohésive |
\(\forall {w}^{\text{*}}\in {L}_{0,}-{\int}_{{\Gamma}_{c}}\left[\mu -{t}_{c}(\lambda +rw)\right]\cdot {w}^{\text{*}}d{\Gamma}_{c}=0\) |
Loi d’interface |
\(\forall {\lambda}^{\text{*}}\in {L}_{0,}-{\int}_{{\Gamma}_{c}}\frac{\left[\lambda -{t}_{c}(\lambda +rw)\right]}{r}\cdot {\lambda}^{\text{*}}d{\Gamma}_{c}=0\) |
\(r\) est le paramètre d’augmentation (confer [R7.02.19]). Rappelons que:
\(\sigma ={\sigma}^{'}-\mathit{bp}1\)
\({t}_{c}={t}_{c}^{'}-{p}_{f}n\)
Formulations faibles du problème hydrodynamique#
Formulation faible pour le massif#
La formulation faible de l’équation de conservation de la masse dans le cas du massif s’écrit:
\(\begin{array}{c}-{\int}_{\Omega}\frac{\partial {m}_{w}}{\partial t}{p}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}M\cdot \nabla {p}^{\text{*}}d\Omega \hfill \\ \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{F}}{M}_{\text{ext}}{p}^{\text{*}}d{\Gamma}_{F}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{1}}{q}_{1}{p}^{\text{*}}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{2}}{q}_{2}{p}^{\text{*}}d{\Gamma}_{2}\hfill \end{array}\) \(\forall {p}^{\text{*}}\in {P}_{0}\)
avec \({M}_{\mathit{ext}}\) les flux normaux imposés sur la partie \({\Gamma}_{F}\) de \(\partial \Omega\) .
Formulation faible pour l’interface#
La formulation faible de l’équation de conservation de la masse dans le cas de l’interface s’écrit:
\(\begin{array}{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}\frac{\partial w}{\partial t}{p}_{f}^{\text{*}}d{\Gamma}_{c}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}W\cdot \nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\hfill \\ \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{f}}{W}_{\text{ext}}{p}_{f}^{\text{*}}d{\Gamma}_{f}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{1}}{q}_{1}{p}_{f}^{\text{*}}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{2}}{q}_{2}{p}_{f}^{\text{*}}d{\Gamma}_{2}\hfill \end{array}\) \(\forall {p}_{f}^{\text{*}}\in {F}_{0}\)
avec \({W}_{\mathit{ext}}\) les flux normaux imposés sur la partie \({\Gamma}_{f}\) de \({\Gamma}_{c}\) .
La formulation faible de la condition de continuité de la pression \({p}_{f}\) au niveau de l’interface s’écrit:
\({\int}_{{\Gamma}_{1}}\left({p}^{\sup}-{p}_{f}\right){q}_{1}^{\text{*}}d{\Gamma}_{1}=0\) \(\forall {q}_{1}^{\text{*}}\in {Q}_{1}\)
\({\int}_{{\Gamma}_{2}}\left({p}^{\inf}-{p}_{f}\right){q}_{2}^{\text{*}}d{\Gamma}_{2}=0\) \(\forall {q}_{2}^{\text{*}}\in {Q}_{2}\)
Remarque:
La condition de continuité de la pression \({p}_{f}\) au niveau de chacune des lèvres de l’interface met en jeu deux relations linéaires du type \({p}^{\sup}-{p}_{f}=0\) sur \({\Gamma}_{1}\) et \({p}^{\inf}-{p}_{f}=0\) sur \({\Gamma}_{2}\) *. Dans Code_Aster, afin de gérer ce type de relation (qui est en fait une condition aux limites* et non une équation d’équilibre, telle l’équation de conservation de la masse), nous avons recours à l’introduction de champs de multiplicateurs de Lagrange. En l’occurrence, les multiplicateurs (que l’on nomme dans la suite multiplicateurs de Lagrange hydrauliques) mis en jeu dans ces deux formulations variationnelles sont en fait les flux virtuels \({q}_{1}^{\text{*}}\) et \({q}_{2}^{\text{*}}\) .
Discrétisation du problème#
Discrétisation temporelle#
Les équations de conservation de la masse dans le cas du massif et de l’interface font intervenir explicitement dans leurs formulations la variable temporelle \(t\) . Afin de discrétiser ces équations, nous utilisons un \(\theta\) -schéma.
En terme de notation une variable indicée par un \(+\) est une variable prise en fin de pas de temps et une variable indicée par un \(-\) est une variable prise en début de pas de temps qui est a priori connue. On pose \(\Delta t={t}^{+}-{t}^{-}\) .
Discrétisation de l’équation mécanique#
La discrétisation en temps des équations pour la mécanique ne fait pas intervenir de \(\theta\) -schéma. Elles sont exprimées à l’instant \(+\text{}\) (c’est à dire après la phase de prédiction) et s’écrivent:
Équation d’équilibre |
\(\forall {u}^{\text{*}}\in {U}_{0,}{\int}_{\Omega}{\sigma}^{+}(u):{\varepsilon}({u}^{\text{*}})d\Omega -{\int}_{{\Gamma}_{t}}{t}^{+}\cdot {u}^{\text{*}}d{\Gamma}_{t}+{\int}_{{\Gamma}_{c}}{\mu}^{+}\cdot ⟦{u}^{\text{*}}⟧d{\Gamma}_{c}=0\) |
Projection du saut de déplacement |
\(\forall {\mu}^{\text{*}}\in {L}_{0},{\int}_{{\Gamma}_{c}}\left(⟦{u}^{+}⟧-{w}^{+}\right)\cdot {\mu}^{\text{*}}d{\Gamma}_{c}=0\) |
Expression de la force cohésive |
\(\forall {w}^{\text{*}}\in {L}_{0,}-{\int}_{{\Gamma}_{c}}\left[{\mu}^{+}-{t}_{c}^{+}({\lambda}^{+}+r{w}^{+})\right]\cdot {w}^{\text{*}}d{\Gamma}_{c}=0\) |
Loi d’interface |
\(\forall {\lambda}^{\text{*}}\in {L}_{0,}-{\int}_{{\Gamma}_{c}}\frac{\left[{\lambda}^{+}-{t}_{c}^{+}({\lambda}^{+}+r{w}^{+})\right]}{r}\cdot {\lambda}^{\text{*}}d{\Gamma}_{c}=0\) |
Discrétisation des équations de l’hydrodynamique#
Cas du massif#
La discrétisation en temps de l’équation de conservation de la masse à l’aide d’un \(\theta\) -schéma s’écrit:
\(\begin{array}{c}-{\int}_{\Omega}\frac{{m}_{w}^{+}-{m}_{w}^{-}}{\Delta t}{p}^{\text{*}}d\Omega \text{}+\text{}\theta {\int}_{\Omega}{M}^{+}\cdot \nabla {p}^{\text{*}}d\Omega \text{}+\text{}\left(1-\theta \right){\int}_{\Omega}{M}^{-}\cdot \nabla {p}^{\text{*}}d\Omega \text{}\\ =\text{}\theta {\int}_{{\Gamma}_{F}}{M}_{\mathit{ext}}^{+}{p}^{\text{*}}d{\Gamma}_{F}\text{}+\text{}\left(1-\theta \right){\int}_{{\Gamma}_{F}}{M}_{\mathit{ext}}^{-}{p}^{\text{*}}d{\Gamma}_{F}\text{}-\text{}\theta {\int}_{{\Gamma}_{1}}{q}_{1}^{+}{p}^{\text{*}}d{\Gamma}_{1}\\ \text{}-\text{}\left(1-\theta \right){\int}_{{\Gamma}_{1}}{q}_{1}^{-}{p}^{\text{*}}d{\Gamma}_{1}\text{}-\text{}\theta {\int}_{{\Gamma}_{2}}{q}_{2}^{+}{p}^{\text{*}}d{\Gamma}_{2}\text{}-\text{}\left(1-\theta \right){\int}_{{\Gamma}_{2}}{q}_{2}^{-}{p}^{\text{*}}d{\Gamma}_{2}\hfill \end{array}\) \(\forall {p}^{\text{*}}\in {P}_{0}\)
Cas de l’interface#
La discrétisation en temps de l’équation de conservation de la masse à l’aide d’un \(\theta\) -schéma s’écrit:
\(\begin{array}{c}-{\int}_{{\Gamma}_{c}}\frac{{w}^{+}-{w}^{-}}{\Delta t}{p}_{f}^{\text{*}}d{\Gamma}_{c}\text{}+\text{}\theta {\int}_{{\Gamma}_{c}}{W}^{+}\cdot \nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\text{}+\text{}\left(1-\theta \right){\int}_{{\Gamma}_{c}}{W}^{-}\cdot \nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\text{}\\ \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{f}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\left(1-\theta \right){\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{f}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{1}}{q}_{1}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{1}\hfill \\ +\phantom{\rule{1em}{0ex}}\left(1-\theta \right){\int}_{{\Gamma}_{1}}{q}_{1}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{2}}{q}_{2}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{2}\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\left(1-\theta \right){\int}_{{\Gamma}_{2}}{q}_{2}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{2}\hfill \end{array}\) \(\forall {p}_{f}^{\text{*}}\in {F}_{0}\)
Discrétisation des équations du modèle poro-mécanique#
Les équations présentées dans cette partie correspondent aux équations du§ 3.3 exprimées de manière incrémentale. On développe ces équations car elles sont affectées par la discrétisation avec XFEM.
Cas des apports massiques#
Cas du massif
Les apports massiques s’écrivent alors de manière incrémentale:
\({m}_{w}^{+}-{m}_{w}^{-}={\rho}^{+}{\varphi}^{+}\left(1+{\epsilon}_{v}^{+}\right)-{\rho}^{-}{\varphi}^{-}\left(1+{\epsilon}_{v}^{-}\right)\)
Cas de l’interface
Les apports massiques s’écrivent alors de manière incrémentale:
\({w}^{+}-{w}^{-}={\rho}^{+}{\left(⟦u⟧\cdot {n}_{c}\right)}^{+}-{\rho}^{-}{\left(⟦u⟧\cdot {n}_{c}\right)}^{-}\)
Discrétisation avec XFEM#
Représentation de l’élément HM-XFEM et ddls associés#
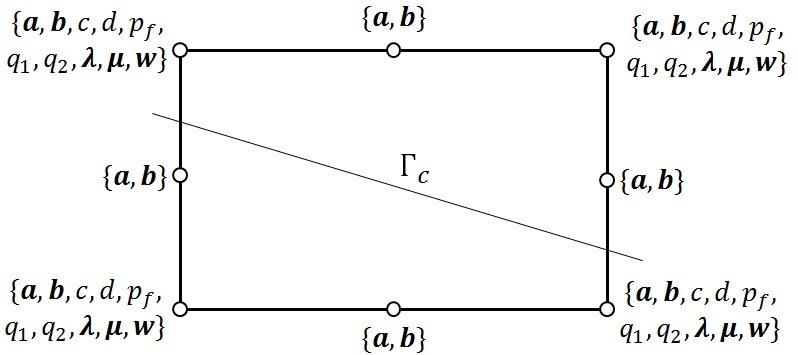
Pour représenter l’élément HM-XFEM, nous avons choisi d’utiliser des éléments quadratiques qui peuvent être soit des quadrangles à 8 nœuds (QUAD8) soit des triangles à 6 nœuds (TRIA6), soit des hexaèdres à 20 nœuds (HEXA20), soit des pentaèdres à 15 nœuds (PENTA15), soit des pyramides à 13 nœuds (PYRA13), soit des tétraèdres à 10 nœuds (TETRA10). Nous considérons que tout élément du maillage traversé par l’interface est du type HM-XFEM. Cet élément baigne autour d’éléments HM non enrichis. Il s’agit de ceux utilisés classiquement pour les modélisations HM.
La Figure représente l’élément HM-XFEM avec une maille QUAD8.
|
Figure 5.2.1-1: Représentation de l’élément HM-XFEM avec des QUAD8
Sur chacune des figures présentées précédemment, les listes en chaque nœud de l’élément contiennent les degrés de liberté (ddls) associés à chaque catégorie de nœuds (nœuds sommets ou nœuds milieux).
Les degrés de liberté:
\(a\) et \(b\) sont associés respectivement à la partie classique et enrichie de l’approximation du champ de déplacements \({u}^{h}\) ,
\(c\) et \(d\) sont associés respectivement à la partie classique et enrichie de l’approximation du champ de pression dans le massif \({p}^{h}\) ,
\({p}_{f}\) sont associés à l’approximation du champ de pression \({p}_{f}^{h}\) au niveau de l’interface,
\({q}_{1}\) et \({q}_{2}\) sont associés à l’approximation des champs de multiplicateurs de Lagrange hydrauliques \({q}_{1}^{h}\) et \({q}_{2}^{h}\) .
\(\lambda ` , :math:\)mu ` et \(w\) sont respectivement associés à l’approximation des multiplicateurs de Lagrange \({\lambda}^{h}\) et \({\mu}^{h}\) et du saut de déplacement \({w}^{h}\) .
Les éléments hydromécaniques présents dans Code_Aster utilisent une «interpolation mixte», afin de réduire les oscillations de la solution numérique [14]. Le champ des déplacements est ainsi interpolé de manière quadratique tandis que le champ de pression de pore est interpolé de manière linéaire. Les degrés de liberté \(c\) et \(d\) ne sont donc portés que par les nœuds sommets tandis que les degrés de liberté \(a\) et \(b\) sont portés à la fois par les nœuds milieux et les nœuds sommets. En ce qui concerne les champs associés à la discontinuités: \({p}_{f}^{h}\) , \({q}_{1}^{h}\) , \({q}_{2}^{h}\) , \({\lambda}^{h}\) , \({\mu}^{h}\) et \({w}^{h}\) , les degrés de libertés sont portés uniquement par les nœuds sommets. En sus, leur espace d’approximation est réduit (voir § 5.2.2 ) afin de respecter la condition de stabilité LBB [8,9]. Cette condition impose en effet une hiérarchie entre les espaces d’approximation, sans quoi on observe l’apparition d’oscillations et la non unicité de la solution du problème couplé.
Par ailleurs il est important de noter que les éléments HM-XFEM qui partagent des nœuds sommets avec les éléments HM classiques, doivent subir un traitement supplémentaire. Il faut en effet mettre à zéro les degrés de libertés enrichis (pour les champs de pression dans le massif et de déplacements) mais également mettre à zéro les degrés de libertés \({p}_{f}\) , \({q}_{1}\) , \({q}_{2}\) , \(\lambda ` , :math:\)mu ` et \(w\) au niveau des nœuds sommets en commun entre ces deux types d’élément. La procédure d’élimination utilisée est celle décrite dans le § 4.4 de la documentation [R5.03.54].
Sur la on résume les points problématiques associés à la cohabitation entre les éléments HM-XFEM et les éléments HM classiques.
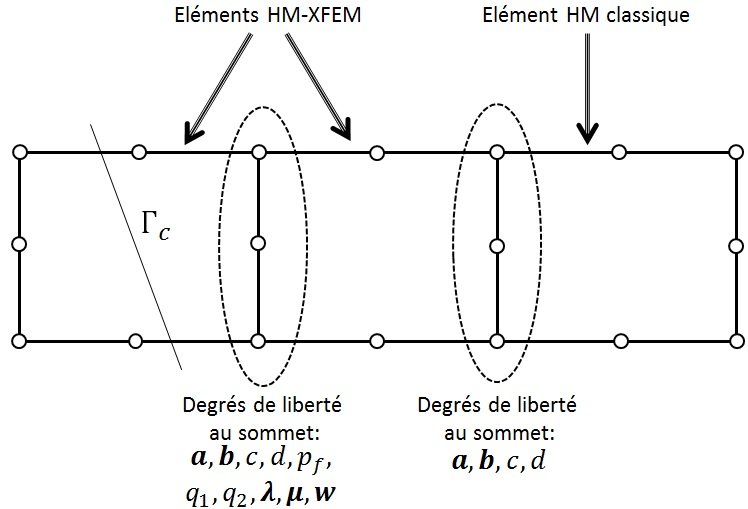
Figure 5.2.1-1: Cohabitation de l’élément HM-XFEM avec l’élément HM classique
Espace réduit pour la discrétisation des champs associés à la discontinuité#
Pour une description détaillée de la discrétisation des inconnues de contact (et a fortiori de toutes les inconnues associées à la discontinuité), le lecteur peut se référer à la documentation [R5.03.54], §5. En bref, les composantes initiales du multiplicateur sont définies sur les nœuds sommets \(K\) des éléments parents intersectés (voir fig.). L’implémentation de tels éléments de contact est détaillée en [R5.03.54], §4. On impose ensuite des relations d’égalité entre certaines de ces composantes initialesafin d’aboutir à un nombre plus faible \({N}_{\lambda}\) de degrés de libertéeffectivement indépendants. Ces relations sont portées par certaines arêtes intersectées \(V\) , dites arêtes vitales: un degré de liberté \(I\) réellement indépendant est partagé par un groupe de nœuds de \(K\) (voir fig.), ce qui produit une fonction de forme de contact étendue \({\psi}_{I}:=\sum_{i\in I}{N}_{i}\) (voir fig.). L’algorithme de sélection de telles arêtes vitales, et donc de construction de l’espace réduit, est détaillé dans le documentation [R5.03.54], §6. Le champ de multiplicateurs est ensuite obtenu par interpolation sur les éléments parents et le multiplicateur discret est la trace de ce champ sur l’interface:
\({M}_{h}:=\left\lbrace \sum_{I}{\mu}_{I}{\psi}_{I}{\text{|}}_{\Gamma},{\mu}_{I}\in {\mathrm{ℝ}}^{d}\right\rbrace\)
Figure 5.2.2-1: Maillage non conforme à la fissure et espace réduit pour l’interface
Dans notre cas, les champs associés à la discontinuité sont non seulement les multiplicateurs de Lagrange \(\lambda ,\mu ` et le saut de déplacement :math:`w\) utiles pour la loi cohésive CZM_LIN_MIXmais également les champs hydrauliques associés à la discontinuité: la pression de fluide dans la discontinuité \({p}_{f}\) , et les flux \({q}_{1}\) et \({q}_{2}\) . Ces champs sont tous discrétisés sur l’espace réduit \({M}_{h}\) .
Approximations des champs avec XFEM#
L’approximation des champs en présence peut donc se mettre sous la forme (les champs tests utilisés dans les formes faibles des équations d’équilibre sont approximés de la même manière) :
pour le champ de déplacements:
\({u}^{h}(x)=\sum_{i=1}^{\mathit{nn}}{a}_{i}{\mathrm{\phi }}_{i}(x)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\sum_{j=1}^{\mathit{nne}}{b}_{j}{\mathrm{\phi }}_{j}(x)\stackrel{~}{H}(\mathit{lsn}(x))\)
pour le champ de pression dans le massif:
\({p}^{h}(x)=\sum_{i=1}^{\mathit{nns}}{c}_{i}{\psi}_{i}(x)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\sum_{j=1}^{\mathit{nnse}}{d}_{j}{\psi}_{j}(x)\stackrel{~}{H}(\mathit{lsn}(x))\)
pour le champ de pression dans l’interface:
\({p}_{f}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{({p}_{f})}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
pour les champs de multiplicateurs de Lagrange hydrauliques:
\({q}_{1}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{({q}_{1})}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
\({q}_{2}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{({q}_{2})}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
pour les champs de multiplicateurs de Lagrange et le saut de déplacement utiles pour le modèle de zone cohésive:
\({\lambda}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{\lambda}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
\({\mu}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{\mu}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
\({w}^{h}(x)=\sum_{i=1}^{\mathit{nnc}}{w}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
avec:
\(\mathit{lsn}\) la level set normale dont l’iso-zéro représente l’interface. Pour plus de précisions sur l’utilisation des level set avec XFEM dans Code_Aster , le lecteur pourra se reporter à la documentation [R7.02.13],
\(\stackrel{~}{H}\) la fonction discontinue au travers de la discontinuité repérée par \(\mathit{lsn}(x)=0\) (confer [R7.02.12])
\({\phi }_{i}(x)\) les fonctions de forme de l’élément quadratique utilisées pour l’interpolation du champ de déplacements,
\({\psi}_{i}(x)\) les fonction de forme de l’élément parent linéaire utilisées pour l’interpolation du champ de pression dans le massif.
\(\stackrel{~}{{\psi}_{i}}(x)\) les fonctions de forme linéaires utilisées pour l’interpolation des champs associés à la discontinuité. Elles diffèrent des fonctions de forme de l’élément parent linéaire \({\psi}_{i}(x)\) dans le cas où des nœuds sommets de l’élément parent linéaire n’appartiennent à aucune arête intersectée par la discontinuité (voir § 5.4 et [R5.03.54] pour plus de détails). Cette situation n’apparaît que pour les éléments non simpliciaux.
\(\mathit{nn}\) l’ensemble des nœuds du maillage et \(\mathit{nne}\) l’ensemble des nœuds enrichis du maillage.
\(\mathit{nn}\) l’ensemble des nœuds sommets du maillage et \(\mathit{nne}\) l’ensemble des nœuds sommets enrichis du maillage.
\(\mathit{nnc}\) les nœuds sommets appartenant à une arête intersectée par la discontinuité \({\Gamma}_{c}\) .
Remarque:
Comme nous pouvons le remarquer dans la définition des approximations des champs de déplacements et de pression du massif, l’enrichissement dû à la présence d’une pointe de fissure n’est pas pris en compte. Dans la formulation du problème mécanique, nous nous basons sur un modèle de zones cohésives régularisé. L’avantage d’un tel modèle (historiquement introduit par Barenblatt [12] afin d’améliorer la théorie de Griffith concernant les milieux fracturés [13]) est de palier le fait que les contraintes sont infinies en pointe de fissure. Par conséquent, l’enrichissement par fonctions singulières de l’approximation du champ de déplacements est inapproprié ici, mais tout à fait envisageable en ce qui concerne l’enrichissement de l’approximation du champ de pression dans le massif comme le suggère [7].
Extension au cas multi-fissuré#
Représentation de l’élément multi-fissuré HM-XFEM et ddls associés#
Dans Code_Aster , les éléments XFEM peuvent supporter jusqu’à 4 fissures par élément (voir [R7.02.12]). Il est également possible d’avoir des fissures connectées. Ces fonctionnalités sont en particulier disponible pour les éléments HM-XFEM. A chaque fissure supplémentaire, on ajoute un jeu de degrés de liberté enrichis pour le champ des déplacement et de pression de pore ainsi qu’un jeu de degrés de liberté associé à la discontinuité supplémentaire. Sur la Figure , on représente un élément HM-XFEM QUAD8 intersecté par deux interfaces (non connectées à gauche et connectées à droite) ainsi que les degrés de liberté portés par chacun des nœuds.
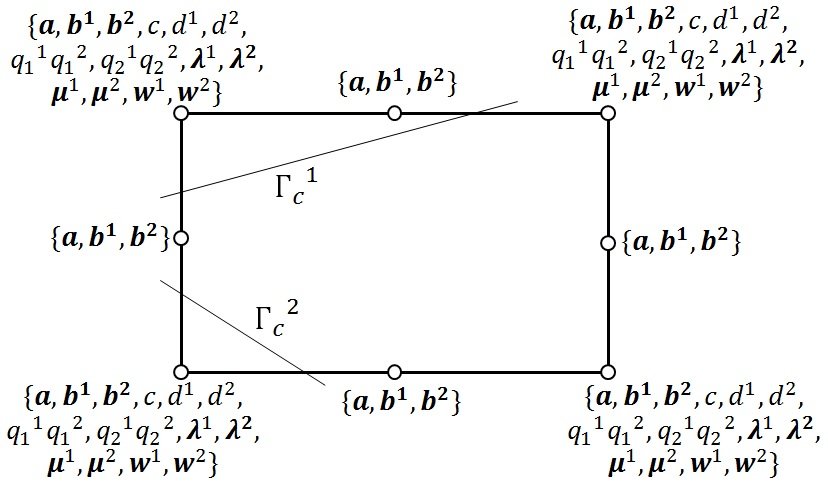
|
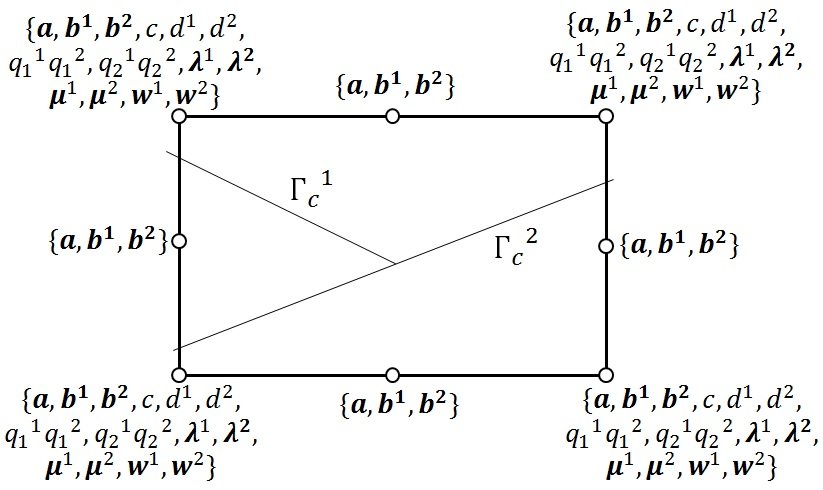
|
Figure 5.3.1-1: Représentation d’un élément HM-XFEM QUAD8 intersecté par deux discontinuités non connectées (à gauche) et connectées (à droite)
Approximations des champs avec XFEM dans le cas multi-fissuré#
Dans le cas où plusieurs fissures intersectent une même maille, pour chaque nœud, une correspondance est établie entre chaque interface et les degrés de libertés enrichis et d’interface (voir [R7.02.12]). Ainsi l’approximation des champs en présence peut se mettre sous la forme suivante:
pour le champ de déplacements:
\({u}^{h}(x)=\sum_{i=1}^{\mathit{nn}}{a}_{i}{\mathrm{\phi }}_{i}(x)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\sum_{\mathit{ifiss}=1}^{\mathit{nfiss}}\sum_{j=1}^{\mathit{nne}}{b}_{j}^{\alpha (\mathit{ifiss},j)}{\mathrm{\phi }}_{j}(x)\stackrel{~}{H}({\mathit{lsn}}_{\mathit{ifiss}}(x))\)
pour le champ de pression dans le massif:
\({p}^{h}(x)=\sum_{i=1}^{\mathit{nns}}{c}_{i}{\psi}_{i}(x)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\sum_{\mathit{ifiss}}^{\mathit{nfiss}}\sum_{j=1}^{\mathit{nnse}}{d}_{j}^{\alpha (\mathit{ifiss},j)}{\psi}_{j}(x)\stackrel{~}{H}({\mathit{lsn}}_{\mathit{ifiss}}(x))\)
pour les degrés de libertés d’interface, on a par exemple pour la pression de fluide \({p}_{f}\) dans l’interface \(\mathit{ifiss}\) :
\({p}_{f}^{h,\mathit{ifiss}}(x)=\sum_{i=1}^{\mathit{nnc}}{({p}_{f}^{\alpha (\mathit{ifiss},i)})}_{i}\stackrel{~}{{\psi}_{i}}(x)\)
avec:
:math:`alpha ` la fonction qui à chaque interface associe le numéro de degré de liberté enrichi ou d’interface associé pour chaque nœud.
Jonction de fractures hydrauliques#
Les champs associés à chaque interface sont donc discrétisés avec des jeux de degrés de liberté distincts. Les interfaces fonctionnent donc indépendamment, même si elles exercent leur influence l’une sur l’autre via la matrice poreuse. Dans le cas d’une jonction d’interface hydraulique, il convient cependant d’imposer une connexion hydraulique, afin de permettre les échanges de fluide au niveau de la jonction (voir Figure ) . A cette fin, on peut soit imposer la conservation de la masse au niveau de la jonction (loi des nœuds sur les flux \(W\) dans chaque branche de la jonction), soit imposer la continuité de la pression \({p}_{f}\) dans les fissures au niveau de la jonction.
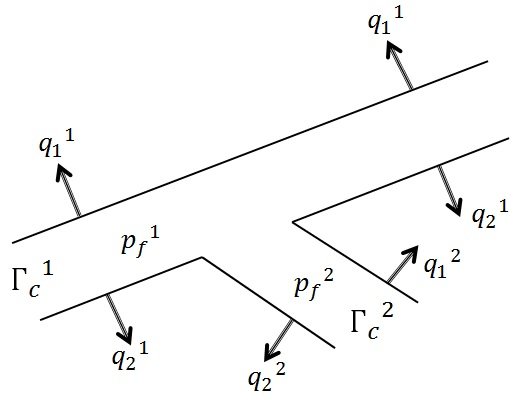
Figure 5.3.3-1: Jonction de fissure hydraulique
Etant donné l’espace d’approximation réduit dont nous disposons pour le champ \({p}_{f}\) , il est préférable d’imposer la continuité de la pression \({p}_{f}\) au niveau de la jonction, plutôt que d’imposer une égalité sur les flux \(W\) qui font intervenir le gradient de \({p}_{f}\) . A cette fin, on identifie un nœud porteur du degré de liberté \({p}_{f}\) à la fois pour la fissure principale et la fissure branchée et on impose l’égalité de ces deux degrés de liberté (voir Figure ).
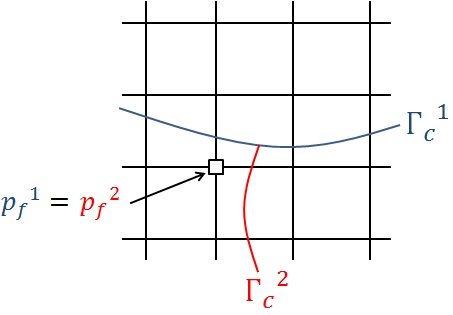
Figure 5.3.3-2: Imposition de la continuité de la pression \({p}_{f}\) dans les fissures hydrauliques au niveau d’une jonction.
Imposition d’un flux dans une interface hydrauliques#
En ce qui concerne les flux de fluide surfaciques injectés dans la matrice poreuse, l’intégration du second membre se fait naturellement sur le bord \({\Gamma}_{F}\) sur lequel est imposé le flux \({M}_{\mathit{ext}}\) (voir§ 4.2.1 ), de dimension \(\mathit{ndim}-1\) si la dimension du domaine \(\Omega ` est :math:\)mathit{ndim}` . En revanche, lorsqu’il s’agit d’imposer un flux de fluide directement dans la fracture, la dimension de l’embouchure \({\Gamma}_{f}\) est \(\mathit{ndim}-2\) si la dimension du domaine \(\Omega ` est :math:\)mathit{ndim}` . L’intégration du chargement flux \({W}_{\mathit{ext}}\) requiert donc plus d’attention. Intéressons nous dans un premier temps au cas où la dimension de \(\Omega ` est :math:`2\) . Le flux \({W}_{\mathit{ext}}\) s’exprime alors en \(\mathit{kg}.{s}^{-1}\) et \({\Gamma}_{f}\) est réduit à un point. Rappelons que l’espace d’approximation des champs associés à l’interface cohésive comme \({p}_{f}\) s’appuie uniquement sur les nœuds sommets des arêtes strictement intersectées par l’interface et sur les nœuds sur lesquels passe l’interface. Sur la Figure , les nœuds effectivement porteurs du degré de liberté \({p}_{f}\) sont marqués par des carrés blancs et rouges. L’intégration du terme \({\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}{p}_{f}^{\text{*}}d{\Gamma}_{f}\) se fera donc sur la restriction de cet espace d’approximation au bord du domaine. Dans le cas où l’interface cohésive est conforme au bord du domaine, on imposera directement \({W}_{\mathit{ext}}\) sur le nœud \({N}_{1}\) (voir droite). Dans le cas non conforme, on devra déterminer la distance relative \(\alpha ` entre l'embouchure :math:`I\) et les nœuds sommets de l’arête de bord intersectée \({N}_{1}\) et \({N}_{2}\) (voir gauche). On imposera alors \((1-\alpha ){W}_{\mathit{ext}}\) sur le nœud \({N}_{1}\) et \(\alpha {W}_{\mathit{ext}}\) sur le nœud \({N}_{2}\) .
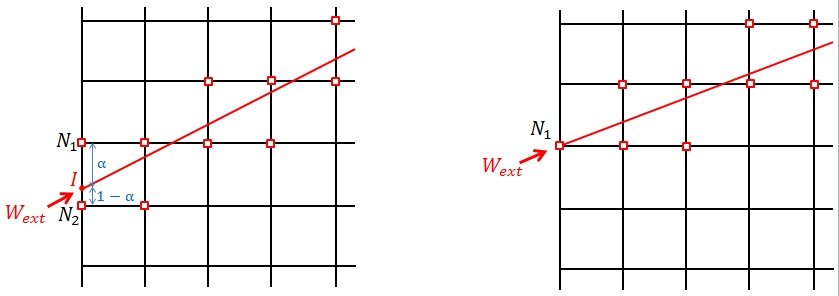
Figure 5.4-1: Imposition d’un flux dans une fracture pour les modèles 2D plan dans le cas non conforme (à gauche) et dans le cas conforme (à droite).
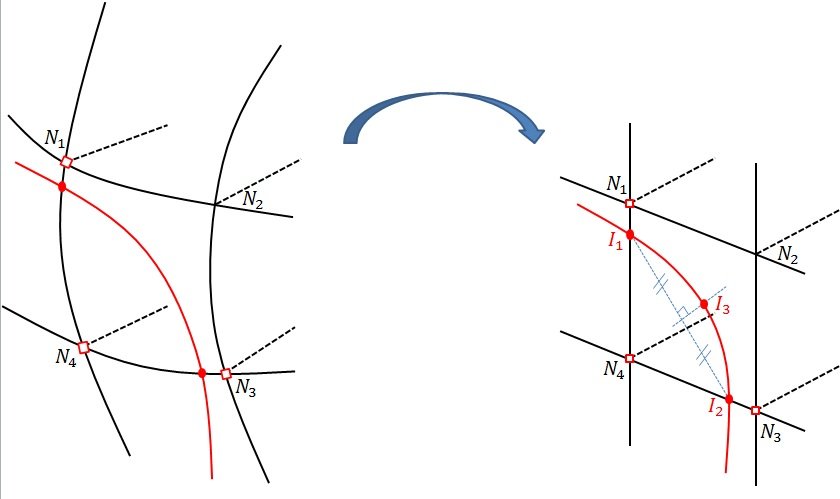
Dans le cas où la dimension de \(\Omega ` est :math:`3\) , le flux \({W}_{\mathit{ext}}\) s’exprime en \(\mathit{kg}.{m}^{-1}.{s}^{-1}\) et \({\Gamma}_{f}\) est une courbe. Afin d’intégrer le terme \({\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}{p}_{f}^{\text{*}}d{\Gamma}_{f}\) , il est nécessaire de disposer d’un support qui approxime la courbe \({\Gamma}_{f}\) . A cette fin, on reconstruit une approximation de l’interface sur le bord du domaine comme une chaîne de segments à 3 nœuds. Dans chaque face de bord, l’interface \({\Gamma}_{c}\) est discrétisée par un segment à 3 nœuds. Pour ce faire, on utilise la même procédure que pour la création des sous éléments d’intégration XFEM (voir [R7.02.12]). Les faces de bord intersectées par \({\Gamma}_{c}\) sont basculées dans l’espace de référence (voir ). On détermine alors les intersections \({I}_{1}\) et \({I}_{2}\) avec les arêtes de la face qui vont constituer les nœuds extrémités du segment à 3 nœuds. Puis on détermine la position du nœud milieu \({I}_{3}\) sur la médiatrice du segment \([{I}_{1}{I}_{2}]\) . On obtient alors une approximation quadratique de l’interface au bord du domaine \(\Omega ` . On est alors à même d'évaluer :math:`{\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}{p}_{f}^{\text{*}}d{\Gamma}_{f}\) en effectuant une intégration sur la chaîne des segments à 3 nœuds qui approximent \({\Gamma}_{f}\) . Il faut cependant bien prendre garde à l’espace d’approximation de \({p}_{f}\) sur les faces intersectées. Comme rappelé précédemment, l’espace d’approximation du champ \({p}_{f}\) s’appuie uniquement sur les nœuds sommets des arêtes strictement intersectées par la discontinuité et les nœuds sur lesquels passe la discontinuité. Sur la Figure, seuls les nœuds \({N}_{1}\) , \({N}_{3}\) et \({N}_{4}\) de la face quadrangle de bord portent le degré de liberté \({p}_{f}\) . Afin de satisfaire tout de même la partition de l’unité dans la face quadrangle, on utilise des fonctions de forme modifiées pour le champ \({p}_{f}\) :
\(\begin{array}{c}\stackrel{~}{{\psi}_{{N}_{1}}}={\psi}_{{N}_{1}}+\frac{{\psi}_{{N}_{2}}}{3}\\ \stackrel{~}{{\psi}_{{N}_{2}}}=0\\ \stackrel{~}{{\psi}_{{N}_{3}}}={\psi}_{{N}_{3}}+\frac{{\psi}_{{N}_{2}}}{3}\\ \stackrel{~}{{\psi}_{{N}_{4}}}={\psi}_{{N}_{4}}+\frac{{\psi}_{{N}_{2}}}{3}\end{array}\)
avec \(\psi ` les fonctions de forme de l'élément parent linéaire et :math:\)stackrel{~}{psi}` les fonctions de forme modifiées pour s’adapter à l’espace d’approximation du champ \({p}_{f}\) .
Figure 5.4-2: Imposition d’un flux dans une fracture pour les modèles 3D
Résolution du problème couplé#
Linéarisation du problème couplé#
Linéarisation par la méthode de Newton-Raphson#
Le problème couplé étant non linéaire (la non linéarité du problème est due aux termes de masse des formulations variationnelles des équations de conservation de la masse pour le massif et pour l’interface et aux termes cohésifs pour la mécanique) nous procédons à sa linéarisation à l’aide de la méthode de Newton-Raphson.
Soit \(F\) le système non linéaire associé aux formulations variationnelles des équations de conservation de la masse (pour le massif et pour l’interface), de l’équation d’équilibre mécanique et de la condition de continuité de la pression \({p}_{f}\) au niveau de l’interface. Soit \({x}^{k}\) le vecteur des inconnues nodales à l’itération de Newton \(k\) tel que:
\({x}^{k}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\lbrace {u}^{k}\phantom{\rule{1em}{0ex}}{p}^{k}\phantom{\rule{1em}{0ex}}{p}_{f}^{k}\phantom{\rule{1em}{0ex}}{q}_{1}^{k}\phantom{\rule{1em}{0ex}}{q}_{2}^{k}\phantom{\rule{1em}{0ex}}\lambda \phantom{\rule{1em}{0ex}}\mu \phantom{\rule{1em}{0ex}}w\rbrace }^{T}\)
A l’itération \(k+1\) (le vecteur des inconnues nodales \({x}^{k+1}\) n’est pas connu) on pose:
\(F({x}^{k+1})=0\)
Afin de pouvoir déterminer \({x}^{k+1}\) , nous avons recours à un développement de Taylor de \(F\) (qui est une fonction vectorielle supposée continue et dérivable) au voisinage de \({x}^{k}\) (alors connu à l’itération \(k+1\) ). Ainsi le système linéaire à l’itération \(k+1\) s’écrit :
\(-F({x}^{k})=\frac{\partial F({x}^{k})}{\partial {x}^{k}}\cdot \delta {x}^{k}\)
avec \(\delta {x}^{k}={x}^{k+1}-{x}^{k}\) l’incrément des valeurs des inconnues nodales entre deux itérations successives (qui est une inconnue à l’itération \(k+1\) ), \(\frac{\partial F({x}^{k})}{\partial {x}^{k}}\) la matrice tangente et \(F({x}^{k})\) le second membre. Ces deux derniers termes sont connus à l’itération \(k+1\) et sont fonctions de \({x}^{k}\) .
Écriture intégrale du problème linéarisé#
Dans la suite on considère que les inconnues sont notées avec un \(\delta\) et les champs testsavec une \(\text{*}\) en exposant.
Le système linéaire à l’itération de Newton \(k+1\) s’écrit (pour un pas de temps):
équation d’équilibre mécanique
\(\forall {u}^{\text{*}}\in {U}_{0}\) :
\(\begin{array}{c}{\int}_{\Omega}{\sigma}^{\text{' +}}(\delta u):\epsilon ({u}^{\text{*}})d\Omega \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}b\delta p(1:\epsilon ({u}^{\text{*}}))d\Omega \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}{\rho}^{+}b{F}^{m+}\mathit{Tr}(\nabla (\delta u)){u}^{\text{*}}d\Omega \hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}\left(\frac{{\rho}^{+}(b-{\varphi}^{+})}{{K}_{s}^{}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\frac{{\rho}^{+}{\varphi}^{+}}{{K}_{w}^{}}\right)\delta p{F}^{m+}{u}^{\text{*}}d\Omega +{\int}_{{\Gamma}_{c}}\delta \mu \cdot ⟦{u}^{\text{*}}⟧d{\Gamma}_{c}\hfill \\ \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{\Omega}{\sigma}^{\text{' +}}(u):\epsilon ({u}^{\text{*}})d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}b{p}^{+}(1:\epsilon ({u}^{\text{*}}))d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}{r}^{+}{F}^{m+}{u}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{t}}{t}^{+}{u}^{\text{*}}d{\Gamma}_{t}\hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}\mu \cdot ⟦{u}^{\text{*}}⟧d{\Gamma}_{c}\hfill \end{array}\)
projection du saut de déplacement
\(\forall {\mu}^{\text{*}}\in {L}_{0}\) :
\({\int}_{{\Gamma}_{c}}\left(⟦\delta u⟧-\delta w\right)\cdot {\mu}^{\text{*}}d{\Gamma}_{c}=-{\int}_{{\Gamma}_{c}}\left(⟦u⟧-w\right)\cdot {\mu}^{\text{*}}d{\Gamma}_{c}\)
contrainte cohésives
\(\forall {w}^{\text{*}}\in {L}_{0}\) :
\(\begin{array}{c}-{\int}_{{\Gamma}_{c}}\left[\delta \mu -\frac{\partial {t'}_{c}}{\partial (\lambda +rw)}\cdot \left(\delta \lambda +r\delta w\right)\right]\cdot {w}^{\text{*}}d{\Gamma}_{c}-{\int}_{{\Gamma}_{c}}\delta {p}_{f}{n}_{c}\cdot {w}^{\text{*}}d{\Gamma}_{c}\hfill \\ ={\int}_{{\Gamma}_{c}}\left[\mu -{t'}_{c}(\lambda +rw)+{p}_{f}{n}_{c}\right]\cdot {w}^{\text{*}}d{\Gamma}_{c}\hfill \end{array}\)
loi d’interface
\(\forall {\lambda}^{\text{*}}\in {L}_{0}\) :
\(\begin{array}{c}-{\int}_{{\Gamma}_{c}}\left[\frac{\delta \lambda }{r}-\frac{\partial {t'}_{c}}{\partial (\lambda +rw)}\cdot \left(\frac{\delta \lambda }{r}+\delta w\right)\right]\cdot {\lambda}^{\text{*}}d{\Gamma}_{c}\hfill \\ ={\int}_{{\Gamma}_{c}}\frac{\left[\lambda -{t'}_{c}(\lambda +rw)\right]}{r}\cdot {\lambda}^{\text{*}}d{\Gamma}_{c}\hfill \end{array}\)
équation de conservation de la masse (cas du massif)
Ainsi \(\forall {p}^{\text{*}}\in {P}_{0}\) :
\(\begin{array}{c}-{\int}_{\Omega}{\rho}^{+}b\mathit{Tr}(\nabla (\delta u)){p}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}\left(\left(\frac{{\rho}^{+}(b-{\varphi}^{+})}{{K}_{s}^{}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\frac{{\rho}^{+}{\varphi}^{+}}{{K}_{w}^{}}\right)\delta p\right){p}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0ex}{0ex}}\hfill \\ \Delta t\theta \left[{\int}_{\Omega}\left({\lambda}^{+}\left(-\nabla {p}^{+}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\rho}^{+}{F}^{m+}\right)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\lambda}^{+}{\rho}^{+}{F}^{m+}\right)\frac{{\rho}^{+}}{{K}_{w}^{}}\delta p\nabla {p}^{\text{*}}d\Omega \right]\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0ex}{0ex}}\hfill \\ \Delta t\theta \left[{\int}_{\Omega}{\rho}^{+}\left(-\nabla {p}^{+}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\rho}^{+}{F}^{m+}\right)\frac{\partial {\lambda}_{}^{+}}{\partial {p}^{+}}\delta p\nabla {p}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}{\rho}^{+}{\lambda}^{+}\nabla (\delta p)\nabla {p}^{\text{*}}d\Omega \right]\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0ex}{0ex}}\\ \Delta t\theta \left[{\int}_{\Omega}{\rho}^{+}\left(-\nabla {p}^{+}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\rho}^{+}{F}^{m+}\right)\frac{\partial {\lambda}_{}^{+}}{\partial {\epsilon}_{\text{v}}^{+}}\mathit{Tr}(\nabla (\delta u))\nabla {p}^{\text{*}}d\Omega \right]\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{1}}\delta {q}_{1}{p}^{\text{*}}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{2}}\delta {q}_{2}{p}^{\text{*}}d{\Gamma}_{2}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}\left({m}_{w}^{+}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{m}_{w}^{-}\right){p}^{\text{*}}d\Omega \hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{\Omega}{M}^{+}\nabla {p}^{\text{*}}d\Omega \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t(1\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\theta ){\int}_{\Omega}{M}^{-}\nabla {p}^{\text{*}}d\Omega \hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{F}}{M}_{\text{ext}}^{+}{p}^{\text{*}}d{\Gamma}_{F}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t(1\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\theta ){\int}_{{\Gamma}_{F}}{M}_{\text{ext}}^{-}{p}^{\text{*}}d{\Gamma}_{F}\hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{1}}{q}_{1}^{+}{p}^{\text{*}}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t(1\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\theta ){\int}_{{\Gamma}_{1}}{q}_{1}^{-}{p}^{\text{*}}d{\Gamma}_{1}\hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{2}}{q}_{2}^{+}{p}^{\text{*}}d{\Gamma}_{2}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t(1\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\theta ){\int}_{{\Gamma}_{2}}{q}_{2}^{-}{p}^{\text{*}}d{\Gamma}_{2}\hfill \end{array}\)
équation de conservation de la masse (cas de l’interface)
Ainsi \(\forall {p}_{f}^{\text{*}}\in {F}_{0}\) :
\(\begin{array}{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}{\rho}^{+}\delta ⟦u⟧\cdot {n}_{c}{p}_{f}^{\text{*}}d{\Gamma}_{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}\left(\frac{{\rho}^{+}⟦{u}^{+}⟧\cdot {n}_{c}}{{K}_{w}}\delta {p}_{f}\right){p}_{f}^{\text{*}}d{\Gamma}_{c}\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{c}}-\phantom{\rule{0.5em}{0ex}}\frac{{\rho}^{+}\nabla {p}_{f}^{+}}{12\mu }\left(3{\left(⟦{u}^{+}⟧\cdot {n}_{c}\right)}^{2}\right)\delta ⟦u⟧\cdot {n}_{c}\nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{c}}-\phantom{\rule{0.5em}{0ex}}\frac{{\left(⟦{u}^{+}⟧\cdot {n}_{c}\right)}^{3}\nabla {p}_{f}^{+}}{12\mu }\frac{{\rho}^{+}}{{K}_{w}}\delta {p}_{f}\nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{c}}-\phantom{\rule{0.5em}{0ex}}\frac{{\rho}^{+}{\left(⟦{u}^{+}⟧\cdot {n}_{c}\right)}^{3}}{12\mu }\nabla \left(\delta {p}_{f}\right)\nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{1}}\delta {q}_{1}{p}_{f}^{\text{*}}d{\Gamma}_{1}\right]\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{2}}\delta {q}_{2}{p}_{f}^{\text{*}}d{\Gamma}_{2}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}({w}^{+}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{w}^{-}){p}_{f}^{\text{*}}d{\Gamma}_{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{c}}{W}^{+}\nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\Delta t(1-\theta ){\int}_{{\Gamma}_{c}}{W}^{-}\nabla {p}_{f}^{\text{*}}d{\Gamma}_{c}\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{1}}{q}_{1}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{1}\right]\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t(1-\theta )\left[{\int}_{{\Gamma}_{1}}{q}_{1}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{1}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta \left[{\int}_{{\Gamma}_{2}}{q}_{2}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{2}\right]\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t(1-\theta )\left[{\int}_{{\Gamma}_{2}}{q}_{2}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{2}\right]\hfill \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t\theta {\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}^{+}{p}_{f}^{\text{*}}d{\Gamma}_{f}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\Delta t(1-\theta ){\int}_{{\Gamma}_{f}}{W}_{\mathit{ext}}^{-}{p}_{f}^{\text{*}}d{\Gamma}_{f}\hfill \end{array}\)
équation de continuité de la pression \({p}_{f}\) au niveau de l’interface
Ainsi \(\forall {q}_{1}^{\text{*}}\in {Q}_{1}\) et \(\forall {q}_{2}^{\text{*}}\in {Q}_{2}\)
\({\int}_{{\Gamma}_{1}}\delta {p}^{inf}{q}_{1}^{\text{*}}d{\Gamma}_{1}-{\int}_{{\Gamma}_{1}}\delta {p}_{f}{q}_{1}^{\text{*}}d{\Gamma}_{1}=-{\int}_{{\Gamma}_{1}}\left({p}^{inf}-{p}_{f}\right){q}_{1}^{\text{*}}d{\Gamma}_{1}\) sur \({\Gamma}_{1}\)
\({\int}_{{\Gamma}_{2}}\delta {p}^{\sup}{q}_{2}^{\text{*}}d{\Gamma}_{2}-{\int}_{{\Gamma}_{2}}\delta {p}_{f}{q}_{2}^{\text{*}}d{\Gamma}_{2}=-{\int}_{{\Gamma}_{2}}\left({p}^{\sup}-{p}_{f}\right){q}_{2}^{\text{*}}d{\Gamma}_{2}\) sur \({\Gamma}_{2}\)
Écriture des termes élémentaires avec XFEM#
Écriture sous forme matricielle du problème couplé#
Le système d’équations précédemment discrétisé à l’itération de Newton \(k+1\) peut se mettre sous la forme (où \(\delta u\) , \(\delta p\) , \(\delta {p}_{f}\) , \(\delta {q}_{1}\) , \(\delta {q}_{2}\) , \(\delta \lambda ` , :math:\)delta mu ` et \(\delta w\) sont les inconnues du problème à résoudre) :
Équilibre mécanique |
\(\begin{array}{c}\lbrace {u}^{\text{*}}\rbrace \left[{K}_{\mathit{meca}}^{1}\right](\delta u)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {u}^{\text{*}}\rbrace \left[{K}_{\mathit{meca}}^{2}\right](\delta p)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {u}^{\text{*}}\rbrace \left[A\right](\delta u)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0ex}{0ex}}\\ \lbrace {u}^{\text{*}}\rbrace \left[B\right](\delta p)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {⟦u⟧}^{\text{*}}\rbrace \left[{C}^{1}\right]\lbrace \delta \mu \rbrace \phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0ex}{0ex}}\hfill \\ \lbrace {u}^{\text{*}}\rbrace ({L}_{\mathit{meca}})\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {⟦u⟧}^{\text{*}}\rbrace ({L}^{1})\hfill \end{array}\) |
Projection du saut de déplacement |
\(\begin{array}{c}\lbrace {\mu}^{\text{*}}\rbrace \left[{K}^{\mu u}\right](\delta u)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {\mu}^{\text{*}}\rbrace {\left[-{K}^{w\mu }\right]}^{T}(\delta w)\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0ex}{0ex}}\\ \lbrace {\mu}^{\text{*}}\rbrace ({L}_{u})\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}\lbrace {\mu}^{\text{*}}\rbrace ({L}_{w})\hfill \end{array}\) |
Contrainte cohésive |
\(\begin{array}{c}\lbrace {w}^{\text{*}}\rbrace \left[-{K}^{w\mu }\right](\delta \mu )\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {w}^{\text{*}}\rbrace \left[{D}^{ww}\right](\delta w)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {w}^{\text{*}}\rbrace \left[{K}^{wp}\right](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0ex}{0ex}}\\ \lbrace {w}^{\text{*}}\rbrace {\left[{D}^{\lambda w}\right]}^{T}(\delta \lambda )\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-\lbrace {w}^{\text{*}}\rbrace ({L}_{\mu}^{2})\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {w}^{\text{*}}\rbrace ({L}_{\mathit{cohe}}^{1})\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {w}^{\text{*}}\rbrace ({L}_{p})\end{array}\) |
Loi d’interface |
\(\begin{array}{c}\lbrace {\lambda}^{\text{*}}\rbrace \left[{D}^{\lambda w}\right](\delta w)\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {\lambda}^{\text{*}}\rbrace \left[{D}^{\lambda \lambda }\right](\delta \lambda )\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0ex}{0ex}}\\ -\lbrace {\lambda}^{\text{*}}\rbrace ({L}_{\mu}^{1})\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\lbrace {\lambda}^{\text{*}}\rbrace ({L}_{\mathit{cohe}}^{2})\hfill \end{array}\) |
Conservation de la masse (cas du massif) |
\(\begin{array}{c}\lbrace {p}^{\text{*}}\rbrace [{M}_{\mathit{hydro}}^{1}](\delta u)+\lbrace {p}^{\text{*}}\rbrace [{M}_{\mathit{hydro}}^{2}](\delta p)+\Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{K}_{\mathit{hydro}}^{1}](\delta p)+\\ \Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{K}_{\mathit{hydro}}^{2}](\delta p)+\Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{K}_{\mathit{hydro}}^{3}](\delta p)+\\ \Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{K}_{\mathit{hydro}}^{4}](\delta u)+\Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{E}^{1}](\delta {q}_{1})+\Delta t\theta \lbrace {p}^{\text{*}}\rbrace [{E}^{2}](\delta {q}_{2})\\ =\lbrace {p}^{\text{*}}\rbrace ({L}_{\mathit{hydro}}^{1})+\Delta t\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{2})}_{\theta}+\Delta t\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{3})}_{\theta}+\\ \Delta t\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{4})}_{\theta}+\Delta t\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{5})}_{\theta}\end{array}\) |
Conservation de la masse (cas de l’interface) |
\(\begin{array}{c}\lbrace {p}_{f}^{\text{*}}\rbrace [{W}_{\mathit{hydro}}^{1}](\delta ⟦u⟧)+\lbrace {p}_{f}^{\text{*}}\rbrace [{W}_{\mathit{hydro}}^{2}](\delta {p}_{f})+\Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{1}](\delta ⟦u⟧)+\\ \Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{2}](\delta {p}_{f})+\Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{3}](\delta {p}_{f})+\\ \Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{1}](\delta {q}_{1})+\Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{2}](\delta ⟦u⟧)\\ \Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{3}](\delta {q}_{2})+\Delta t\theta \lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{4}](\delta ⟦u⟧)=\\ \lbrace {p}_{f}^{\text{*}}\rbrace ({L}_{\mathit{hydro}}^{6})+\Delta t\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{7})}_{\theta}+\Delta t\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{8})}_{\theta}+\\ \Delta t\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{9})}_{\theta}+\Delta t\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{10})}_{\theta}\end{array}\) |
Continuité de la pression |
\(\lbrace {q}_{1}^{\text{*}}\rbrace [{D}^{1}](\delta p)+\lbrace {q}_{1}^{\text{*}}\rbrace [{D}^{2}](\delta {p}_{f})=\lbrace {q}_{1}^{\text{*}}\rbrace ({J}_{\mathit{cont}}^{1})\) \(\lbrace {q}_{2}^{\text{*}}\rbrace [{D}^{3}](\delta p)+\lbrace {q}_{2}^{\text{*}}\rbrace [{D}^{4}](\delta {p}_{f})=\lbrace {q}_{2}^{\text{*}}\rbrace ({J}_{\mathit{cont}}^{2})\) |
\({K}_{\mathit{meca}}^{1}\) est la matrice élémentaire de rigidité mécanique classiquement rencontrée en mécanique,
\({K}_{\mathit{meca}}^{2}\) est due à la décomposition du tenseur des contraintes du massif (hypothèse des contraintes effectives),
\(A\) et \(B\) sont dues à la prise en compte des apports massiques dans l’expression de la masse volumique homogénéisée intervenant dans l’expression des efforts volumiques sur \(\Omega\) ,
\({C}^{1}\) est la matrice élémentaire de rigidité pour l’interface,
\({K}^{\mu u}\) et \({K}^{w\mu }\) sont des matrices discrétisant les opérateurs «mortier», la dernière gérant également le changement de base.
\({K}^{wp}\) est une matrice élémentaire de rigidité pour l’interface,
Les matrices \(D\) sont toutes diagonales par blocs: pour \(I\) et \(J\) deux DDL de Lagrange distincts, elles vérifient \({D}_{\mathit{IJ}}=0\) ,
\({M}_{\mathit{hydro}}^{1}\) et \({M}_{\mathit{hydro}}^{2}\) sont les matrices élémentaires de masse dans le cas du massif pour l’hydrodynamique,
\({W}_{\mathit{hydro}}^{1}\) et \({W}_{\mathit{hydro}}^{2}\) sont les matrices élémentaires de masse dans le cas de l’interface pour l’hydrodynamique,
\({K}_{\mathit{hydro}}^{1}\) , \({K}_{\mathit{hydro}}^{2}\) , \({K}_{\mathit{hydro}}^{3}\) et \({K}_{\mathit{hydro}}^{4}\) sont les matrices de rigidité élémentaires pour l’hydrodynamique dans le cas du massif,
\({H}_{\mathit{hydro}}^{1}\) , \({H}_{\mathit{hydro}}^{2}\) et \({H}_{\mathit{hydro}}^{3}\) sont les matrices de rigidité élémentaires pour l’hydrodynamique dans le cas de l’interface,
\({E}^{1}\) et \({E}^{2}\) sont les matrices d’échanges dans le cas du massif,
\({D}^{1}\) et \({D}^{2}\) sont les matrices d’échanges dans le cas de l’interface,
\({F}^{1}\) , \({F}^{2}\) , \({F}^{3}\) et \({F}^{4}\) sont les matrices de continuité de la pression au niveau de l’interface,
\({L}_{\mathit{meca}}\) est le second membre des forces de volumes et surfaciques appliquées sur le domaine et sur sa frontière,
\({L}^{1}\) est le second membre pour l’interface,
\({L}_{u}\) , \({L}_{w}\) et \({L}_{p}\) sont des seconds membres pour la projection du saut des déplacements,
\({L}_{\mu}^{2}\) , et \({L}_{\mathit{cohe}}^{1}\) sont des seconds membres pour la contrainte cohésive,
\({L}_{\mu}^{1}\) et \({L}_{\mathit{cohe}}^{2}\) sont des seconds membres pour la loi d’interface,
\({L}_{\mathit{hydro}}^{i}\) avec \(i\in ⟦1,5⟧\) les seconds membres dus aux apports massiques et aux flux dans le cas du massif pour l’hydrodynamique,
\({L}_{\mathit{hydro}}^{i}\) avec \(i\in ⟦6,10⟧\) les seconds membres dus aux apports massiques et aux flux dans le cas de l’interface pour l’hydrodynamique,
\({J}_{\mathit{hydro}}^{1}\) et \({J}_{\mathit{hydro}}^{2}\) les seconds membres dus aux échanges sur \({\Gamma}_{1}\) et \({\Gamma}_{2}\) .
Remarque:
Comme nous pouvons le remarquer dans les expressions des matrices élémentaires définies ci-après, les quantités \({\rho}^{+}\) , \({\varphi}^{+}\) (fonctionsdesdéplacementset de la pression), \({p}^{+}\) et \({u}^{+}(\mathit{ou}⟦{u}^{+}⟧)\) sont laissées dans l’état (non discrétisées), car il s’agit de grandeurs obtenues au cours de l’itération de Newton précédente (pour le pas de temps courant \(+\) ). Elles sont donc a priori connues. Dans l’expression des matrices élémentaires (pour le cas mécanique et hydrodynamique) nous n’indiquerons pas volontairement le numéro de l’itération de Newton sur ces quantitéspour éviter de surcharger les expressions.
Expression des matrices élémentaires pour lamécanique#
La matrices élémentaire de rigidité mécanique à l’itération de Newton \(k+1\) s’écrit:
:math:`lbrace {u}^{text{*}}rbrace left[{K}_{mathit{meca}}^{1}right](delta u)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}{int}_{Omega}({a}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{b}_{i}^{text{*}})nabla {mathrm{phi }}_{i}{C}_{ij}nabla {mathrm{phi }}_{j}({delta a}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{delta b}_{j})dOmega `
Les matrices élémentaires due à la décomposition du tenseur des contraintes du massif (hypothèse des contraintes effectives) s’écrit à l’itération de Newton \(k+1\) :
:math:`lbrace {u}^{text{*}}rbrace left[{K}_{mathit{meca}}^{2}right](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}b({a}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{b}_{i}^{text{*}})nabla {mathrm{phi }}_{i}[mathit{Id}]{psi}_{j}({delta c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{delta d}_{j})dOmega `
La matrice \(A\) à l’itération de Newton \(k+1\) s’écrit:
:math:`lbrace {u}^{text{*}}rbrace left[Aright](delta u)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}{rho}^{+}b({a}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{b}_{i}^{text{*}}){mathrm{phi }}_{i}[mathit{Id}]nabla {mathrm{phi }}_{j}({delta a}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{delta b}_{j}){F}^{m+}dOmega `
La matrice \(B\) à l’itération de Newton \(k+1\) s’écrit:
:math:`lbrace {u}^{text{*}}rbrace left[Bright](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}left(left(frac{{rho}^{+}(b-{varphi}^{+})}{{K}_{s}^{}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}frac{{rho}^{+}{varphi}^{+}}{{K}_{w}^{}}right)right)({a}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{b}_{i}^{text{*}}){mathrm{phi }}_{i}{psi}_{j}(delta {c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {d}_{j}){F}^{m+}dOmega `
La matrice associée à la projection du saut des déplacements à l’itération de Newton \(k+1\) s’écrit:
\(\lbrace {⟦u⟧}^{\text{*}}\rbrace \left[{C}^{1}\right](\delta \mu )\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}\left(2\stackrel{~}{H}{b}_{i}^{\text{*}}\right){\mathrm{\phi }}_{i}\stackrel{~}{{\psi}_{j}}\left(\delta {\mu}_{j}\right)d{\Gamma}_{c}\)
Les composantes des inconnues \(u\) et \(\mu ` sont définies dans une base fixe :math:\)left({e}_{X},{e}_{Y},{e}_{Z}right)` , tandis que les composantes de \(w\) et \(\lambda ` sont définies dans la base locale :math:\)left(n,{tau}_{1},{tau}_{2}right)` à la surface fissurée \({\Gamma}_{c}\) en chaque point \(x\in {\Gamma}_{c}\) , de sorte que :
\(w(x)=\sum_{i=1}^{{N}_{\lambda}}{\psi}_{I}(x)\left({w}_{I,n}n(x)+{w}_{I,\tau 1}{\tau}_{1}(x)+{w}_{I,\tau 2}{\tau}_{2}(x)\right)\)
Une définition analogue vaut pour \(\lambda ` . Pour un degré de liberté :math:`I\) de l’espace réduit (voir § 5.2.2 ), il est possible de déterminer les composantes \(t{'}_{c,n}^{I},t{'}_{t,\tau 1}^{I},t{'}_{c,\tau 2}^{I}\) de la force cohésive à partir de \(\left({w}_{I,n},{w}_{I,\tau 1},{w}_{I,\tau 2}\right)\) , \(\left({\lambda}_{I,n},{\lambda}_{I,\tau 1},{\lambda}_{I,\tau 2}\right)\) et de la loi cohésive. Ces composantes ne sont pas destinées à être associées à une direction particulière \(I\) du degré de liberté, mais destinées à être reliées au sens faible à la contrainte globale \(\mu ` écrite en base fixe(confer [:external:ref:`R7.02.19 <R7.02.19>\)]).
\({\lbrace u\rbrace }^{\text{*}}\left[{K}^{\mu u}\right](\delta \mu )={\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{j}}{\mathrm{\phi }}_{i}2\stackrel{~}{H}{b}_{i}^{\text{*}}\cdot (\delta {\mu}_{j})d{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}\left[{K}^{w\mu }\right](\delta \mu )={\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{{w}_{j}}^{\text{*}}\cdot Q\cdot (\delta {\mu}_{J})d{\Gamma}_{c}\) avec \(Q\) la matrice de changement de base orthonormale définie comme précédemment.
\({\lbrace w\rbrace }^{\text{*}}\left[{K}^{wp}\right](\delta {p}_{f})={\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{j}}\stackrel{~}{{\psi}_{i}}{w}_{i}^{\text{*}}\cdot {(\delta {p}_{f})}_{j}{n}_{c}d{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}\left[{D}^{ww}\right](\delta w)={\int}_{{\Gamma}_{c}}{w}_{i}^{\text{*}}(\delta {w}_{i})r\frac{\partial {t'}_{c}}{\partial (\lambda +rw)}({\lambda}_{i}+r{w}_{i})\stackrel{~}{{\psi}_{i}^{2}}d{\Gamma}_{c}\) \({\lbrace \lambda \rbrace }^{\text{*}}\left[{D}^{\lambda w}\right](\delta w)={\int}_{{\Gamma}_{c}}{\lambda}_{i}^{\text{*}}(\delta {w}_{i})\frac{\partial {t'}_{c}}{\partial (\lambda +rw)}({\lambda}_{i}+r{w}_{i})\stackrel{~}{{\psi}_{i}^{2}}d{\Gamma}_{c}\)
\({\lbrace \lambda \rbrace }^{\text{*}}\left[{D}^{\lambda \lambda }\right](\delta \lambda )={\int}_{{\Gamma}_{c}}{\lambda}_{i}^{\text{*}}(\delta {\lambda}_{i})\frac{1}{r}\left(\frac{\partial {t'}_{c}}{\partial (\lambda +rw)}({\lambda}_{i}+r{w}_{i})-1\right)\stackrel{~}{{\psi}_{i}^{2}}d{\Gamma}_{c}\)
Expression des seconds membres pour la mécanique#
Dans les expressions des seconds membres présentés ici on indique le numéro de l’itération de Newton précédente \(k\) .
\(\begin{array}{c}\lbrace {u}^{\text{*}}\rbrace ({L}_{\mathit{meca}})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{\Omega}({a}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{b}_{i}^{\text{*}})\nabla {\mathrm{\phi }}_{i}\phantom{\rule{1em}{0ex}}{({\sigma}^{'+}(u))}^{k}d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}b({a}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{b}_{i}^{\text{*}})\nabla {\mathrm{\phi }}_{i}[\mathit{Id}]{({p}^{+})}^{k}d\Omega \\ \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{\Omega}({a}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{b}_{i}^{\text{*}}){\mathrm{\phi }}_{i}({r}_{0}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{({m}_{w}^{+})}^{k}){F}^{m+}d\Omega \phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{t}}({a}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{b}_{i}^{\text{*}}){\mathrm{\phi }}_{i}\phantom{\rule{0.5em}{0ex}}{({t}^{+})}^{k}d{\Gamma}_{t}\end{array}\)
\(\lbrace {⟦u⟧}^{\text{*}}\rbrace ({L}^{1})\phantom{\rule{0.5em}{0ex}}=-\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}\left(2\stackrel{~}{H}{b}_{i}^{\text{*}}\right){\mathrm{\phi }}_{i}\stackrel{~}{{\psi}_{j}}\text{}{\mu}_{j}^{k}d{\Gamma}_{c}\)
\({\lbrace u\rbrace }_{i}^{\text{*}}{\left({L}_{\mu}^{1}\right)}_{i}=-{b}_{i}^{\text{*}}\cdot {\int}_{{\Gamma}_{c}}2{\mathrm{\phi }}_{i}\mu d{\Gamma}_{c}\)
\({\lbrace \mu \rbrace }^{\text{*}}\left({L}_{u}\right)=-{\mu}_{i}^{\text{*}}\cdot {\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}⟦u⟧d{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}\left({L}_{p}\right)=-{w}_{i}^{\text{*}}\cdot {\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}{p}_{f}{n}_{c}d{\Gamma}_{c}\)
\({\lbrace \mu \rbrace }^{\text{*}}\left({L}_{w}\right)=-{\mu}_{i}^{\text{*}}\cdot {\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}{Q}^{T}\cdot wd{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}\left({L}_{\mu}^{2}\right)={w}_{i}^{\text{*}}\cdot {\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}Q\cdot \mu d{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}\left({L}_{\mathit{coh}}^{1}\right)={w}_{i}^{\text{*}}\cdot {t'}_{c}({\lambda}_{i}+r{w}_{i}){\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{i}}d{\Gamma}_{c}\)
\({\lbrace w\rbrace }^{\text{*}}{\left({L}_{\mathit{coh}}^{2}\right)}_{I}=\frac{{w}_{i}^{\text{*}}}{r}{t'}_{c}({\lambda}_{i}+r{w}_{i}){\int}_{{\Gamma}_{c}}\stackrel{~}{{\psi}_{I}}d{\Gamma}_{c}\)
Expression des matrices élémentaires pour l’hydrodynamique#
Cas du massif#
Les matrices élémentaires de masse à l’itération de Newton \(k+1\) s’écrivent:
:math:`lbrace {p}^{text{*}}rbrace left[{M}_{mathit{hydro}}^{1}right](delta u)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}b{rho}^{+}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}}){psi}_{i}[mathit{Id}]nabla {mathrm{phi }}_{j}({delta a}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{delta b}_{j})dOmega `
:math:`lbrace {p}^{text{*}}rbrace left[{M}_{mathit{hydro}}^{2}right](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}left(left(frac{{rho}^{+}(b-{varphi}^{+})}{{K}_{s}^{}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}frac{{rho}^{+}{varphi}^{+}}{{K}_{w}^{}}right)right)({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}}){psi}_{i}{psi}_{j}(delta {c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {d}_{j})dOmega `
Les matrices élémentaires de rigidité à l’itération de Newton \(k+1\) s’écrivent:
:math:`lbrace {p}^{text{*}}rbrace [{K}_{mathit{hydro}}^{1}](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}{int}_{Omega}left({lambda}^{+}left(-nabla {p}^{+}+{rho}^{+}{F}^{m+}right)phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}{rho}^{+}{lambda}^{+}{F}^{m+}right)frac{{rho}^{+}}{{K}_{w}^{rbrace }({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}{psi}_{j}(delta {c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {d}_{j})dOmega `
:math:`lbrace {p}^{text{*}}rbrace [{K}_{mathit{hydro}}^{2}](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}{int}_{Omega}{rho}^{+}left(-nabla {p}^{+}+{rho}^{+}{F}^{m+}right)frac{partial {lambda}_{}^{+}}{partial {p}^{+}}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}{psi}_{j}(delta {c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {d}_{j})dOmega `
:math:`lbrace {p}^{text{*}}rbrace [{K}_{mathit{hydro}}^{3}](delta p)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-{int}_{Omega}{rho}^{+}{lambda}^{+}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}nabla {psi}_{j}(delta {c}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {d}_{j})dOmega `
:math:`lbrace {p}^{text{*}}rbrace [{K}_{mathit{hydro}}^{4}](delta u)phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}{int}_{Omega}{rho}^{+}left(-nabla {p}^{+}+{rho}^{+}{F}^{m+}right)frac{partial {lambda}_{}^{+}}{partial {epsilon}_{v}^{+}}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}[mathit{Id}]nabla {mathrm{phi }}_{j}(delta {a}_{j}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}delta {b}_{j})dOmega `
Les matrices élémentaires d’échange pour le massif à l’itération de Newton \(k+1\) s’écrivent:
\(\lbrace {p}^{\text{*}}\rbrace [{E}^{1}](\delta {q}_{1})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{1}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}\stackrel{~}{{\psi}_{j}}{(\delta {q}_{1})}_{j}d{\Gamma}_{1}\)
\(\lbrace {p}^{\text{*}}\rbrace [{E}^{2}](\delta {q}_{2})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{2}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}\stackrel{~}{{\psi}_{j}}{(\delta {q}_{2})}_{j}d{\Gamma}_{2}\)
Cas de l’interface#
Les matrices élémentaires de masse à l’itération de Newton \(k+1\) s’écrivent:
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{W}_{\mathit{hydro}}^{1}](\delta ⟦u⟧)\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{c}}{\rho}^{+}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{\mathrm{\phi }}_{j}\left(2\stackrel{~}{H}\delta {b}_{j}\right){n}_{c}d{\Gamma}_{c}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{W}_{\mathit{hydro}}^{2}](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{c}}\frac{{\rho}^{+}⟦u⟧\cdot {n}_{c}}{{K}_{w}^{}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{\left(\delta {p}_{f}\right)}_{j}d{\Gamma}_{c}\)
Les matrices élémentaires de rigidité à l’itération de Newton \(k+1\) s’écrivent:
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{1}](\delta ⟦u⟧)\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{c}}\frac{{\rho}^{+}\left(3{\left(⟦u⟧\cdot {n}_{c}\right)}^{2}\right)\nabla {p}_{f}^{+}}{12\mu }{({p}_{f}^{\text{*}})}_{i}\nabla \stackrel{~}{{\psi}_{i}}{\mathrm{\phi }}_{j}\left(2\stackrel{~}{H}\delta {b}_{j}\right){n}_{c}d{\Gamma}_{c}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{2}](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{c}}\frac{{\left(⟦u⟧\cdot {n}_{c}\right)}^{3}\nabla {p}_{f}^{+}}{12\mu }\frac{{\rho}^{+}}{{K}_{w}^{}}{({p}_{f}^{\text{*}})}_{i}\nabla \stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{(\delta {p}_{f})}_{j}d{\Gamma}_{c}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{H}_{\mathit{hydro}}^{3}](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{c}}\frac{{\rho}^{+}{\left(⟦u⟧\cdot {n}_{c}\right)}^{3}}{12\mu }{({p}_{f}^{\text{*}})}_{i}\nabla \stackrel{~}{{\psi}_{i}}\nabla \stackrel{~}{{\psi}_{j}}{(\delta {p}_{f})}_{j}d{\Gamma}_{c}\)
Les matrices élémentaires d’échange pour l’interface à l’itération de Newton \(k+1\) s’écrivent:
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{1}](\delta {q}_{1})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{1}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{(\delta {q}_{1})}_{j}d{\Gamma}_{1}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace [{D}^{2}](\delta {q}_{2})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{2}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{(\delta {q}_{2})}_{j}d{\Gamma}_{2}\)
Continuité de la pression#
Les matrices élémentaires d’échange (pour l’équation de continuité de la pression au niveau de l’interface) à l’itération de Newton \(k+1\) s’écrivent:
\(\lbrace {q}_{1}^{\text{*}}\rbrace [{F}^{1}](\delta {p}^{inf})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{1}}{({q}_{1}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{\psi}_{j}(\delta {c}_{j}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}\delta {d}_{j})d{\Gamma}_{1}\)
\(\lbrace {q}_{1}^{\text{*}}\rbrace [{F}^{2}](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{1}}{({q}_{1}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{(\delta {p}_{f})}_{j}d{\Gamma}_{1}\)
\(\lbrace {q}_{2}^{\text{*}}\rbrace [{F}^{3}](\delta {p}^{\sup})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{2}}{({q}_{2}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{\psi}_{j}(\delta {c}_{j}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}\delta {d}_{j})d{\Gamma}_{2}\)
\(\lbrace {q}_{2}^{\text{*}}\rbrace [{F}^{4}](\delta {p}_{f})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{2}}{({q}_{2}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\stackrel{~}{{\psi}_{j}}{(\delta {p}_{f})}_{j}d{\Gamma}_{2}\)
Remarque:
Dans l’expression des matrices élémentaires définies dans cette partie, on peut constater la présence de deux «inconnues» supplémentaires, \(\delta {p}^{inf}\) et \(\delta {p}^{\sup}\) *. Elles correspondent en fait à l’inconnue relative aux champs de pression* \(\delta p\) définis respectivement sur \({\Gamma}_{1}\) (c’est-à-dire \(\delta {p}^{inf}\) ) et sur \({\Gamma}_{2}\) (c’est-à-dire \(\delta {p}^{\sup}\) ).
Expression des seconds membres élémentaires pour l’hydrodynamique#
Cas du massif#
Dans les expressions des seconds membres présentés ici on indique le numéro de l’itération de Newton précédente:
:math:`lbrace {p}^{text{*}}rbrace ({L}_{mathit{hydro}}^{1})phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}{int}_{Omega}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}}){psi}_{i}left({({m}_{w}^{+})}^{k}phantom{rule{0.5em}{0ex}}-phantom{rule{0.5em}{0ex}}{({m}_{w}^{-})}^{k}right)dOmega `
:math:`lbrace {p}^{text{*}}rbrace {({L}_{mathit{hydro}}^{2})}_{theta}phantom{rule{0.5em}{0ex}}=phantom{rule{0.5em}{0ex}}-theta {int}_{Omega}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}{({M}^{+})}^{k}dOmega phantom{rule{0.5em}{0ex}}-phantom{rule{0.5em}{0ex}}(1-theta ){int}_{Omega}({c}_{i}^{text{*}}phantom{rule{0.5em}{0ex}}+phantom{rule{0.5em}{0ex}}stackrel{~}{H}{d}_{i}^{text{*}})nabla {psi}_{i}{({M}^{-})}^{k}dOmega `
\(\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{3})}_{\theta}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{F}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({M}_{\mathit{ext}}^{+})}^{k}d{\Gamma}_{F}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{F}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({M}_{\mathit{ext}}^{-})}^{k}d{\Gamma}_{F}\)
\(\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{4})}_{\theta}\phantom{\rule{0.5em}{0ex}}=-\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{1}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({q}_{1}^{+})}^{k}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{1}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({q}_{1}^{-})}^{k}d{\Gamma}_{1}\)
\(\lbrace {p}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{5})}_{\theta}\phantom{\rule{0.5em}{0ex}}=-\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{2}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({q}_{2}^{+})}^{k}d{\Gamma}_{2}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{2}}({c}_{i}^{\text{*}}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}\stackrel{~}{H}{d}_{i}^{\text{*}}){\psi}_{i}{({q}_{2}^{-})}^{k}d{\Gamma}_{2}\)
Cas de l’interface#
Dans les expressions des seconds membres présentés ici on indique le numéro de l’itération de Newton précédente.
\(\lbrace {p}_{f}^{\text{*}}\rbrace ({L}_{\mathit{hydro}}^{6})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}{\int}_{{\Gamma}_{c}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\left({({w}^{+})}^{k}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{({w}^{-})}^{k}\right)d{\Gamma}_{c}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{7})}_{\theta}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-\theta {\int}_{{\Gamma}_{c}}{({p}_{f}^{\text{*}})}_{i}\nabla \stackrel{~}{{\psi}_{i}}{({W}^{+})}^{k}d{\Gamma}_{c}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{c}}{({p}_{f}^{\text{*}})}_{i}\nabla \stackrel{~}{{\psi}_{i}}{({W}^{-})}^{k}d{\Gamma}_{c}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{8})}_{\theta}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{f}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({W}_{\mathit{ext}}^{+})}^{k}d{\Gamma}_{f}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{f}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({W}_{\mathit{ext}}^{-})}^{k}d{\Gamma}_{f}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{9})}_{\theta}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{1}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({q}_{1}^{+})}^{k}d{\Gamma}_{1}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{1}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({q}_{1}^{-})}^{k}d{\Gamma}_{1}\)
\(\lbrace {p}_{f}^{\text{*}}\rbrace {({L}_{\mathit{hydro}}^{10})}_{\theta}\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}\theta {\int}_{{\Gamma}_{2}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({q}_{2}^{+})}^{k}d{\Gamma}_{2}\phantom{\rule{0.5em}{0ex}}+\phantom{\rule{0.5em}{0ex}}(1-\theta ){\int}_{{\Gamma}_{2}}{({p}_{f}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}{({q}_{2}^{-})}^{k}d{\Gamma}_{2}\)
Continuité de la pression#
Dans les expressions des seconds membres présentés ici (pour l’équation de continuité de la pression au niveau de l’interface), on indique le numéro de l’itération de Newton précédente.
\(\lbrace {q}_{1}^{\text{*}}\rbrace ({J}_{\mathit{cont}}^{1})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{1}}{({q}_{1}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\left({({p}^{inf})}^{k}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{({p}_{f}^{+})}^{k}\right)d{\Gamma}_{1}\)
\(\lbrace {q}_{2}^{\text{*}}\rbrace ({J}_{\mathit{cont}}^{2})\phantom{\rule{0.5em}{0ex}}=\phantom{\rule{0.5em}{0ex}}-{\int}_{{\Gamma}_{1}}{({q}_{2}^{\text{*}})}_{i}\stackrel{~}{{\psi}_{i}}\left({({p}^{\sup})}^{k}\phantom{\rule{0.5em}{0ex}}-\phantom{\rule{0.5em}{0ex}}{({p}_{f}^{+})}^{k}\right)d{\Gamma}_{2}\)
Bibliographie#
Dolbow. J., Moës. N., Belytschko. T. Discontinuous enrichement in finite elements with a partition of unity method. Finite Element in Analysis and Design. 36 (2000) 235-260.
Belytschko. T., Black. T. Elastic crack growth in finite elements with minimal remeshing. International Journal for Numerical Methods in Engineering, 45 (1999) 601-620.
Moës. N., Doldbow. J., Belytschko. T. A finite element method for crack growth without remeshing. International Journal for Numerical Methods in Engineering, 46 (1999) 131-150.
Melenk.J.M, Babuška.I. The partition of unity finite element method: Basic theory and applications. Computer Methods in Applied Mechanics and Engineering, 139 (1996) 289-314.
Khoei. A.R., Haghighat. E. Extended finite element modeling of deformable porous media with arbitrary interfaces. Applied Mathematical Modeling, 35 (2011) 5426-5441.
Khoei. A.R., Moallemi. S., Haghighat. E. Thermo-hydro-mechanical modeling of impermable discontinuity in saturated porous media with XFEM technique. Engineering Fracture Mechanics, 96 (2012) 701-723.
Lecampion. B. An extended finite element method for hydraulic fracture problems. Communications in Numerical Methods in Engineering, 25 (2) 2009.
Bathe.K.J, Brezzi.F. Stability of finite element mixed interpolations for contact problems. Rend. Mat. Acc. Lincei., 12 (9): 167-183, 2001
Babuška.I. The finite element method with lagrangian multipliers. Numerische Mathematik. 20 (3( 179-192, 1973.
Schaap. M.G, Van Genuchten M.Th. A Modified Mualem-van Genuchten Formulation for Improved Desciption of the Hydraulic Conductivity Near Saturation. Vadose Zone Journal, 5 (2006) 27-34.
Witherspoon. P., Wang. J., Iwai. K., Gale. J. Validity of cubic law for fluid flow in a deformable rock fracture. Water Resour. Res., 16 (6) 1980.
Barenblatt. G. The mathematical theory of equilibrium cracks in brittle fracture. Advances in Applied Mechanics. 7 (1962) 55-129.
Homand. F., Duffaut. P., Manuel de mécanique des roches. Tome 1: Les fondements, Les Presses de l’Ecole des Mines, Paris, 2000
Ern et S. Meunier. A posteriori error analysis of eurler-galerkin approximations to coupled elliptic-parabolic problems. ESAIM: M2AN, 43:353-375, 2009
Faivre, B. Paul, F. Golfier, R.Giot, P. Massin et D? Colombo: 2D coupled HM-XFEM modeling with cohesive zone model and applications to fluid driven fracture network.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
12 |
Maxime Faivre (ENSG) |
Version initiale |
13 |
Bertrand PAUL (IFPEN) |
Version 2 |