v5.01.125 SDND125 – Traitement des comportements non-linéaires localisés avec DYNA_VIBRA#
Résumé:
Dans le contexte de la modernisation de l’architecture de la structure de données utilisée pour le calcul de réponse transitoire sur la base modale d’un modèle muni de non-linéarités localisées (opérateur DYNA_VIBRA),la mise en œuvredes données des comportements non-linéaires a été rationaliséeet un nombre de facilités a été apporté pour l’étape de post traitement.
Ainsi, au travers d’un système discret (masse-ressort), ce cas-test a pour principal objectif d’exposer la nouvelle mise en données de différents comportements non-linéaires localisés disponibles dans l’opérateur DYNA_VIBRA, via l’opérande COMPORTEMENT et le mot-clé RELATION. La relation localisée entre masses est employée pour modéliser les phénomènes ou dispositifs suivants en dynamique:
Modélisation A: Choc frontal viaRELATION = ‘DIS_CHOC’
Modélisation B: Dispositif représentant le flambage linéaire viaRELATION = ‘FLAMBAGE’
Modélisation C: Dispositif anti-sismique viaRELATION = ‘ANTI_SISM’
Modélisation D: Dispositif représentant un comportement viscoélastique non linéaire viaRELATION = ‘DIS_VISC’
Modélisation E: Dispositif représentant un comportement non linéaire viaRELATION = ‘DIS_ECRO_TRAC’
Modélisation F: Dispositif représentant une relation force-déplacement ou moment-rotation viaRELATION = ‘RELA_EFFO_DEPL’
Modélisation G: Dispositif représentant une relation force-vitesse viaRELATION = ‘RELA_EFFO_VITE’
Il s’agit donc d’un cas-test non-régression. Seules des valeurs de calcul ont été enregistrées pour vérifier la cohérence entre différentes versions de code_aster.
Modélisation#
Caractéristiques du maillage#
Le maillage est constitué de 5 nœuds, 4 mailles SEG2 et 3 maille POI1.
Caractéristiques de la modélisation#
Concernant le maillage, les ressorts liant mleftet mrightau support sont modélisés par des éléments discrets (DIS_T) portés sur les segments linéaire (SEG2). Les trois paliers (supports) sont modélisés par des éléments discrets (DIS_TR), Trois masses sont modélisées par des éléments discrets DIS_Tportés par les éléments POI1. Il est important de souligner que, pour la construction des bases modales, il est nécessaire de modéliser les relations entre les masses par le biais d’un discret (DIS_T) porté par un segment linéaire (SEG2) dont la rigidité est très faible.
Paramètres de modélisation#
Modélisation A#
La modélisation A correspond au cas où les masses viennent s’entrechoquer entre elles. La relation de choc frontal est modélisée via RELATION = ‘DIS_CHOC’ et donc caractérisée par une raideur de rigidité normale (modélisation de choc avec pénalisation) ainsi que un amortissement lié à la vitesse du mouvement relatif entre masses:
Choc entre mleftet mcenter:la rigidité normale \({k}_{n}\) = 1.0E+7 (N/m)
Choc entre mrightet mcenter:la rigidité normale \({k}_{n}\) = 3.0E+6 (N/m)
La distance physique entre masses est de 0.1m, correspondant à la distance entre masses dans le maillage. La valeur du mot-clé JEUest donc zéro.
La valeur de l’amortissement tangentiel de choc (unité N m/s en USI) est automatiquement optimisé de façon à minimiser les oscillations résiduelles en adhérence selon la formule :
\({c}_{i}=2\sqrt{({k}_{n}+{k}_{i}){m}_{i}}-2{\xi}_{i}\sqrt{{k}_{i}{m}_{i}}\)
où i est l’indice du mode prépondérant dans la réponse de la structure.
Modélisation B#
La modélisation B correspond au cas où les masses se relient entre elles par le biais d’un dispositif représentant le flambage linéaire. La relation de flambage est modélisée via RELATION = ‘FLAMBAGE’ et donc caractérisée par des paramètres suivants:
Paramètres |
Relation entre mleft et mcenter |
Relation entre mright et mcenter |
Force normale limite qui entraîne le flambage de la structure |
0.50 (N) |
0.50 (N) |
Force normale limite après flambage qui provoque une déformation résiduelle de la structure. |
0.25 (N) |
0.25 (N) |
Valeur de la rigidité normale avant flambage |
1.00 (N/m) |
5.00 (N/m) |
Valeur de la rigidité normale après flambage. |
0.0 (N/m) |
0.0 (N/m) |
Tableau 2.3.2-1
Modélisation C#
La modélisation C correspond au cas où les masses se relient entre elles par le biais d’un dispositif anti-sismique. La relation est modélisée viaRELATION= ‘ANTI_SISM’. Elle permet de calculer la force non linéaire que représentele dispositif anti-sismique selonlaformule:
\({F}_{D}={K}_{2}x+\frac{({K}_{1}-{K}_{2})x}{\sqrt{1+{({K}_{1}x/{P}_{y})}^{2}}}+C\mathit{sign}(\dot{x}){\left|\dot{x}\frac{x}{{x}_{max}}\right|}^{\alpha}\)
et est donc caractérisée pour ce cas-test par des paramètres suivants:
Mots-clés |
Notation dans la formule |
Valeurs |
RIGI_K1 |
\({K}_{1}\) |
6.0E+06(N/m) |
RIGI_K2 |
\({K}_{2}\) |
0.53E+06(N/m) |
SEUIL_FX |
\({P}_{y}\) |
|
C |
\(C\) |
0.07E+05 (Nm/s) |
PUIS_ALPHA |
:math:`alpha ` |
0.2 (-) |
DX_MAX |
\({x}_{max}\) |
0.03 (m) |
Tableau 2.3.3-1
Modélisation D#
La modélisation D correspond au cas où les masses se relient entre elles par le biais d’un dispositif représentant un comportement viscoélastique non linéaire. La relation est modélisée via RELATION = ‘DIS_VISC’ avec un schéma du dispositif comme suit:
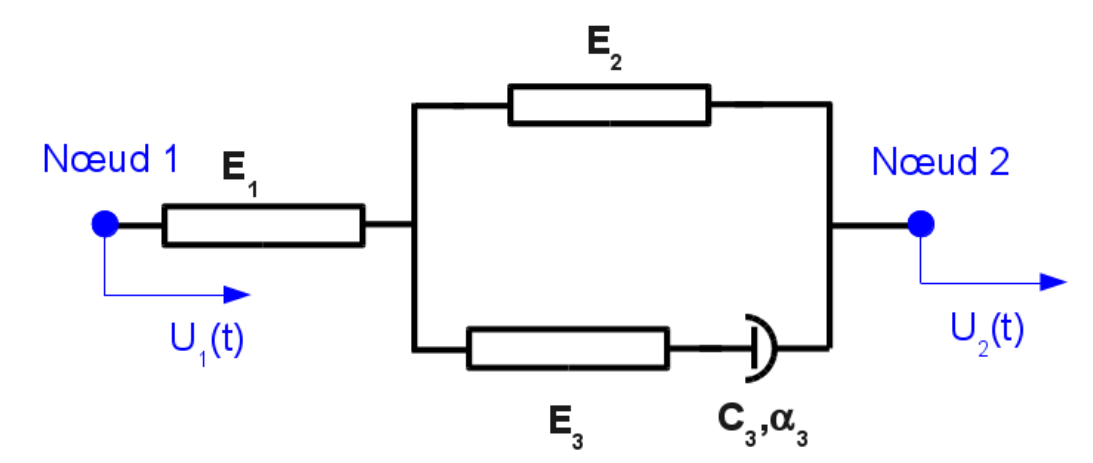
Figure 2.3.4-1
Mots-clés |
Valeurs |
K1 |
120.00 (N/m) |
K2 |
10.00(N/m) |
K3 |
60.00(N/m) |
C |
1.70 (N s/m) |
PUIS_ALPHA |
0.5(-) |
Tableau 2.3.4-1
Modélisation E#
La modélisation E correspond au cas où les masses se relient entre elles par le biais d’un dispositif représentant un comportement non linéaire défini par une fonction déplacement-force. La relation est modélisée via RELATION = ‘DIS_ECRO_TRAC’. La fonction définissant la relation non-linéaire entre mleft et mcenter est fournie la formule suivante:
\({Y}_{1}(p)={S}_{Y}+\frac{{K}_{p}p}{\sqrt[\rho ]{1+{(\frac{{K}_{p}p}{{S}_{U}-{S}_{Y}})}^{\rho}}}\)
où:
\({S}_{Y}=200(N)\)
\({S}_{U}=450(N)\)
\({K}_{p}=400(N/m)\)
\(\rho =1.50\)
valeur de \(p\) allant de 0 à 0.2 m avec un pas de 0.01 m.
La fonction définissant la relation non-linéaire entre mrightet mcenterest définie par la fonction suivante:
\({Y}_{2}(p)=0.5{Y}_{1}(p)\)
Modélisation F#
La modélisation F correspond au cas où une relation force-déplacement sur le degré de liberté DX du nœud porté la mcenter est modélisée via RELATION = ‘RELA_EFFO_DEPL’. La fonction non-linéaire est définie via l’opérateur DEFI_FONCTION comme suit:
FX_REL = DEFI_FONCTION(NOM_RESU = “FORC”,
NOM_PARA = “DX”,
PROL_GAUCHE=”LINEAIRE”,
PROL_DROITE=”LINEAIRE”,
VALE = ( 0. , 0.,
, -1.E5))
Modélisation G#
La modélisation F correspond au cas où une relation force-vitesse sur le degré de liberté DX du nœud porté la mcenter est modélisée via RELATION = ‘RELA_EFFO_VITE’. La fonction non-linéaire est définie via l’opérateur DEFI_FONCTION comme suit:
FV_REL = DEFI_FONCTION(NOM_RESU = “FORC”,
NOM_PARA = “DX”,
PROL_GAUCHE=”LINEAIRE”,
PROL_DROITE=”LINEAIRE”,
VALE = ( 0. , 0.,
, -1.E5))
Résultats de la modélisation#
Les fonctions extraites des résultats de l’opérateur DYNA_VIBRA sont vérifiées à un «instant» de paramètre donné:
Modélisation |
Variable interne testée |
V aleur «instant» |
Valeur calculée |
A |
F_NORMAL |
0.68044 (s) |
1698.446690744 (N) |
B |
ENFO_PLA |
Max |
3.768582449313 (-) |
C |
F_AXIAL (mleftet mcenter) |
0.50 (s) |
299.2592122524 (N) |
F_ AXIAL (mrightet mcenter) |
0.50 (s) |
-351.300917823(N) |
|
D |
DXLOC_N1 (mleftet mcenter) |
0.50 (s) |
-1.65534568841 (m) |
DXLOC_N1 (mrightet mcenter) |
0.50 (s) |
1.55534568841 (m) |
|
E |
DXLOC_N1 (mleftet mcenter) |
0.50 (s) |
0.23532826190(m) |
DXLOC_N1 (mrightet mcenter) |
0.50 (s) |
-0.33532826190(m) |
|
F |
FCMP_LOC |
0.50 (s) |
-1.20303127238 (N) |
G |
FCMP_LOC |
0.45(s) |
9.562489444456 (N) |
Tableau 3-1
Synthèse des résultats#
Mise en ouvre des données d’entrée pour les différents comportements non-linéaire localisés effectuée avec bon déroulement des calculs