r3.03.03 Raccords 3D – Poutre, 2D – Poutre, Coque - 3D#
Résumé :
Ce document explique le principe retenu dans Code_Aster pour relier :
une modélisation milieu continu 3D ou 2D et une modélisation poutre,
une modélisation milieu continu 3D et une modélisation coque ou plaque.
Pour la modélisation 3D-poutre ou 2D-poutre, ce raccord se traduit par des relations linéaires reliant les déplacements des nœuds de la structure :
En 3D, six relations linéaires reliant les déplacements de l’ensemble des nœuds 3D (3 degrés de liberté par nœud) au nœud de poutre, qui possède 6 degrés de liberté.
En 2D, trois relations linéaires reliant les déplacements de l’ensemble des nœuds 2D (2 degrés de liberté par nœud) au nœud de poutre, qui possède 3 degrés de liberté.
Pour la modélisation 3D-coque, le raccord assure également la compatibilité entre les déplacements et rotations des nœuds coque (5 degrés de liberté) et les 3 degrés de liberté de la partie volumique.
Le raccord 3D-coque#
Objectif#
Le but principal est d’avoir un modèle de raccord entre une structure coquée et une structure tridimensionnelle 3D, en utilisant une formulation de liaison par méthode variationnelle faible. Cette approche plus rigoureuse permet d’assurer une transmission cohérente et précise des efforts mécaniques.
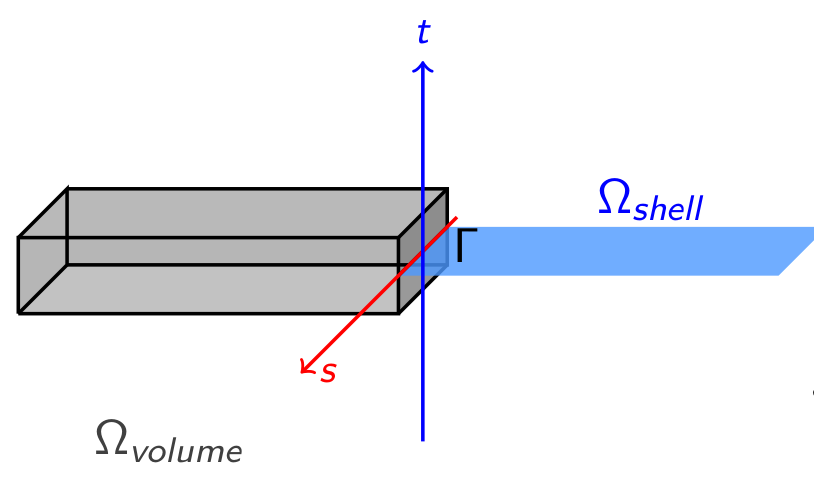
Le cadre du raccord#
Le couplage entre les deux domaines (volumique et coque) est formulé à l’aide d’une approche variationnelle faible, menant à un système mixte de type Lagrangien. Le système global s’écrit alors sous la forme suivante :
où :
\(\mathbf{K}\) est la matrice de rigidité globale issue de l’assemblage des domaines,
\(\mathbf{u} = (\mathbf{u}_v, \mathbf{u}_s) \in \mathbf{V}_v \times \mathbf{V}_s\) regroupe les inconnues de déplacement et rotations des deux sous-domaines,
\(\lambda_l\) et \(\lambda_c\) sont les multiplicateurs de Lagrange associés respectivement aux conditions de liaison coque-solide et aux conditions aux limites éventuelles,
\(\mathbf{B}_l\) et \(\mathbf{B}_c\) représentent les opérateurs de liaison et de conditions aux limites, respectivement.
L’équation variationnelle associée à la contrainte de liaison cinématique s’écrit :
ce qui revient à imposer :
où :
\(W_{\lambda}\) est l’espace des multiplicateurs de Lagrange
\(\mathbb{P}_{W_{\lambda}}\) désigne l’opérateur de projection orthogonale dans l’espace \(W_{\lambda}\) au sens du produit scalaire de \(L^2(\Gamma)\).
Cela garantit la continuité faible des déplacements à l’interface \(\Gamma\) entre les deux modèles, assurant ainsi un couplage mécaniquement cohérent.
Invertibilité du système : cas discret#
Soit \(h\) un paramètre caractérisant la finesse du maillage. On suppose l’indépendance des contraintes, c’est-à-dire :
Dans ce cas, une condition nécessaire à l’invertibilité est la surjectivité de \(\mathbf{B}_l\). Cela revient à vérifier l’inégalité suivante :
où \(\langle \cdot, \cdot \rangle\) désigne le produit scalaire dans \(L^2(\Gamma)\).
Espace des multiplicateurs de Lagrange#
Si l’on choisit un espace de multiplicateurs de Lagrange tel que :
c’est-à-dire si l’on considère des fonctions de la forme :
Les fonctions \(\lambda_1\) et \(\lambda_2\) appartiennent au même espace que celui utilisé pour la cinématique de la coque induite par l’opérateur trace. Dans ce cas, la condition de stabilité précédente est vérifiée, mais la constante de stabilité demeure néanmoins dépendante du maillage.
Remarquons au passage que la qualité de la liaison dépend également du niveau d’inclusion suivant :
Lorsque cette inclusion est une égalité, cela signifie que la discrétisation utilisée pour la partie volumique reproduit bien la cinématique de la coque à l’interface.
Le raccord 3D-poutre#
Objectifs et solutions exclues#
Lorsque l’on désire analyser finement une partie d’une structure élancée complexe [Figure 2.1-a], on peut, pour minimiser la taille du maillage à manipuler, vouloir représenter la structure par une poutre « loin » de la partie à analyser. Le but de la schématisation par une poutre est d’amener des conditions aux limites réalistes aux bords de la partie modélisée et maillée en milieu continu 3D. Le raccord 3D‑Poutre doit donc satisfaire les exigences suivantes :
P1 |
Pouvoir transmettre les efforts de poutre (torseur) au maillage 3D |
P2 |
Ne pas engendrer de contraintes “parasites” (voire de concentration de contraintes), car il faudrait alors placer le raccord suffisamment loin de la zone à analyser pour que ces perturbations soient atténuées dans la zone d’étude. |
P3 |
Ne pas favoriser les conditions cinématiques ou les conditions statiques de raccord l’une par rapport à l’autre. Il doit être équivalent de ramener un torseur d’effort ou de déplacement aux limites du domaine 3D. |
P4 |
Admettre des comportements quelconques de part et d’autre du raccord (élasticité, plasticité…) et permettre également une analyse dynamique. |

Figure 2.1-a
Si ces objectifs sont atteints on pourra également utiliser les règles de raccord pour traiter le problème de l’encastrement d’une poutre dans un massif 3D. Cependant la répartition des contraintes dans le massif autour de l’encastrement restera assez grossière et devra être utilisée avec précaution. Il est préférable de mailler le raccord en 3D puis de prolonger l’amorce du maillage 3D de la section de poutre par un des éléments de poutre avec raccord 3D/Poutre [Figure 2.1-b].

Figure 2.1-b
Au vu des objectifs 1 à 4, on peut d’ores et déjà éliminer deux techniques de raccord courantes :
la première qui ramène tout le raccord au traitement de conditions de liaisons entre les points en vis-à-vis à l’intersection de l’axe neutre de la poutre et du solide 3D. Hormis la difficulté de définir correctement la rotation « ponctuelle » du point matériel appartenant au solide 3D, on concentre les efforts (réaction concentrée, couple) en ce point et on brise la symétrie cinématique/statique en privilégiant une cinématique particulière.
la seconde solution qui impose totalement un déplacement de poutre (NAVIER‑BERNOULLI) aux points du massif 3D se trouvant à l’intersection du solide 3D et de la section de la poutre. En élasticité, on sait que l’hypothèse d’indéformabilité des sections dans leur plan n’est qu’une approximation. Correcte du point de vue énergétique pour la poutre, elle conduit à des concentrations de contraintes au voisinage des limites de la section de jonction pour le solide 3D.
Remarque :
Il va sans dire que tout ce qui est présenté ici n’est valable que dans l’hypothèse des petites perturbations (petits déplacements).
Orientation#
Nous partirons des éléments mécaniques du raccord :
le champ de vecteur contraintes \(\sigma .n\) défini sur la trace de la section \(S\) de la poutre sur le massif 3D, \(n\) étant la normale au plan de \(S\) ,
et le champ de déplacement \({u}^{\text{3D}}\) défini sur ce même domaine,
pour le solide tridimensionnel, ainsi que :
le torseur \(T\) des efforts de poutre au centre d’inertie géométrique \(G\) de \(S\) ,
et le torseur \(D\) des déplacements de poutre en ce même point,
pour la poutre.
Ces grandeurs mécaniques sont reliées par :
les conditions de continuité cinématique,
les conditions d’équilibre du raccord.
Les premières conditions sont les conditions de liaisons à imposer dans une approche « déplacement », les secondes se déduisent de la formulation faible de l’équilibre via le travail virtuel des actions de contact entre poutre et massif (qui n’est autre que l’expression du « principe » de l’action et la réaction écrit pour l’interface \(S\) ). Sur la surface \(S\) , on a en effet pour tout déplacement virtuel \((v,T,\Omega )\) licite :
\({\int}_{}s.n.v\text{dS}=F.T+M.\Omega\) éq 2.2-1
où :
\(T\text{et}\Omega\) sont respectivement la translation et la rotation infinitésimale de la poutre : \(D=(T,\Omega )\)
\(F\text{et}M\) sont respectivement la résultante et le moment dans la poutre au point de raccord: \(T=(F,M)\)
Le premier membre de cette égalité va fournir le produit scalaire grâce auquel on définira la « composante poutre » d’un champ de déplacement 3D défini sur \(S\) . En utilisant ce produit scalaire, on assurera la symétrie de l’approche entre conditions cinématiques et statiques de raccord (P3) ainsi que la possibilité de traiter des comportements quelconques de part et d’autre du raccord (P4) puisqu’aucun aspect de comportement n’apparaît dans l’égalité d’équilibre utilisée.
La démarche :
On va décomposer le champ de déplacement 3D en une partie « poutre » et une partie « complémentaire ». Ceci nous amènera à définir assez naturellement les conditions de raccord cinématique entre poutre et solide 3D comme l’égalité du déplacement (torseur) de poutre et de la partie poutre du champ de déplacement 3D [(§ 2.3)]. Une fois ceci fait, l’égalité [éq 2.2-1] nous permettra d’interpréter en terme statique les conditions de raccord et d’accéder ainsi aux conditions de raccord statique [(§2.4)].
Décomposition du déplacement 3D sur l’interface#
La jonction entre le solide tridimensionnel \(B\) et la poutre de section \(S\) est supposée plane et de normale \(n\) parallèle à la tangente \(\tau\) à la poutre au point de contact \(G\) , centre d’inertie géométrique de la section \(S\) [Figure 2.3-a].

Figure 2.3-a
On exclut donc le cas (b) où la poutre ne « sort » par perpendiculairement à la surface du solide. Il faut bien comprendre que cette restriction est nécessaire à la cohérence du raccord tel qu’il est envisagé ici puisque la théorie des poutres ne connaît que des coupures normale à la fibre moyenne : la condition d’équilibre [éq 2.2-1] n’a aucun sens si \(S\) n’est pas la section droite de la poutre. Dans le cas où cette condition est violée, on pourra modifier le maillage pour la réaliser comme l’indique le schéma ci‑dessous.

Figure 2.3-b
On note :

\((G,{e}_{1}{e}_{2})\) un repère principal d’inertie géométrique de \(S\) ayant pour origine le centre d’inertie \(G\) , et \(({x}_{1},{x}_{2})\) les coordonnées associées,
\(n\) ou \({\mathrm{e}}_{3}\) la normale au plan \(S\) , sortante au massif 3D,
\({\varepsilon}^{\text{\alpha \beta }3}=({e}_{\alpha},{e}_{\mathrm{\beta }},{e}_{3})\) la forme alternée du produit mixte des vecteurs de base,
enfin \(I\) le tenseur d’inertie géométrique de \(S\) (diagonal dans le repère \(({e}_{1}{e}_{2})\) ) et \(A=\mid S\mid\) l’aire de la section \(S\) .
Rappelons que le tenseur d’inertie \(I\) peut être défini de manière équivalente par une application linéaire (représentant mixte):
\(I(U)={\int}_{S}\text{GM}(x)\wedge (U\wedge \text{GM}(x))\text{dx}\)
ou une application bilinéaire symétrique (représentant covariant):
\(I(U,V)={\int}_{S}(U\wedge \text{GM}(x)).(V\wedge \text{GM}(x))\text{dx}\)
Ces deux expressions seront utiles, dans le repère \((G,{e}_{1}{e}_{2}{e}_{3})\) la matrice représentative de \(I\) est :
\(\left[I\right]=\left[\begin{array}{ccc}{I}_{1}& 0& 0\\ 0& {I}_{2}& 0\\ 0& 0& {I}_{1}+{I}_{2}\end{array}\right]\)
avec \({I}_{\alpha}\) moment d’inertie géométrique de \(S\) par rapport à l’axe \((G,{e}_{\alpha})\) . Par convention les indices grecs prennent les valeurs 1 ou 2.
L’espace utile pour les champs de déplacements et de vecteurs contraintes définis sur \(S\) est \(V={L}^{2}{(S)}^{3}\) . On introduit l’espace \(T\) des champs associés à un torseur (défini par deux vecteurs):
\(T=\left\lbrace v\in V/\exists (T,\Omega )\text{tel que}v(M)=T+\Omega \wedge \text{GM}\right\rbrace\) éq 2.3-1
Pour les champs de déplacement de \(S,T\) est la translation de la section (ou du point \(G\) ), \(\Omega\) la rotation infinitésimale et les champs \(v\) sont les déplacements conservant la section \(S\) plane et non déformée (Hypothèses de NAVIER-BERNOULLI).
Pour les champs de vecteurs contraintes, \(\mid S\mid T\) est la résultante \(F\) des actions appliquées à \(S\) , et \(I(\Omega )\) est le moment résultant \(M\) en \(G\) . Les champs \(v\) correspondent alors à des répartitions de contraintes affines dans la section. En effet, on a:
\(\begin{array}{}F(\sigma )\equiv {\int}_{S}s.n\text{dS}={\int}_{S}T\text{dS}=\mid S\mid T\\ M(\sigma )\equiv {\int}_{S}\text{GM}(x)\wedge \sigma .n\text{dS}={\int}_{S}\text{GM}(x)\wedge (\Omega \wedge \text{GM})\text{dS}=I(\Omega )\end{array}\)
On a utilisé ici le fait que \(G\) est centre d’inertie géométrique donc : \({\int}_{S}{x}_{\alpha}\text{dS}=0\) . Le sous-espace vectoriel \(T\) étant de dimension finie (égale à 6) possède un supplémentaire orthogonal pour le produit scalaire défini sur \(V\) :
\({T}^{\perp }=\left\lbrace v\in V/{\int}_{S}v.w\text{dS}=0\forall w\in T\right\rbrace\) éq 2.3-2
Soit, de façon plus explicite :
\({T}^{\perp }=\left\lbrace v\in V/{\int}_{S}v\text{dS}=0\text{et}{\int}_{S}\text{GM}\wedge v\text{dS}=0\right\rbrace\) éq 2.3-3
Tout champ de \(V\) se décompose de façon unique en somme d’un élément de \(T\) et d’un élément de \({T}^{\perp }\) .
\(\begin{array}{ccc}u={u}^{p}+{u}^{s}& {u}^{p}\in T,& {u}^{s}\in {T}^{\perp }\end{array}\) éq 2.3-4
On a de plus la propriété suivante :
Pour tout couple de champ 3D \((u,v)\) définis sur \(S\) ,
\(\begin{array}{ccc}u={u}^{p}+{u}^{s}& & \\ & & \Rightarrow {\int}_{S}v.w\text{dS}={\int}_{S}{v}^{p}.{w}^{p}\text{dS}+{\int}_{S}{v}^{s}.{w}^{s}\text{dS}\\ v={v}^{p}+{v}^{s}& & \end{array}\) éq 2.3-5
La définition suivante est donc naturelle:
Définition :
On appelle composante de déplacement de poutre d’un champ \(u\) défini sur la section la composante \({u}^{p}\) de \(u\) sur le sous-espace.
Le calcul de la partie poutre d’un champ 3D \(u\) s’opère en utilisant la propriété de projection orthogonale puisque \(\mathrm{T}\) et \({\mathrm{T}}^{\mathrm{\perp }}\) sont orthogonaux par définition.
Si on note \({u}^{p}={T}_{u}+{\Omega}_{u}\wedge \text{GM}\) , alors:
\(({T}_{u},{\Omega}_{u})=\begin{array}{c}\text{Argmin}\\ (T,\Omega )\end{array}{\int}_{S}{(u-T-\Omega \wedge \text{GM})}^{2}\) éq 2.3-6
On notera au passage l’interprétation de la composante poutre de \(u\) : c’est le champ de déplacement de poutre le plus proche de \(u\) au sens des moindres carrés. Le calcul du minimum conduit immédiatement à la caractérisation:
\(\begin{array}{ccc}{T}_{u}=\frac{1}{\mid S\mid }{\int}_{S}u\text{dS},& & {\Omega}_{u}={I}^{-1}({\int}_{S}\text{GM}\wedge u\text{dS})\end{array}\) éq 2.3-7
La condition de raccord cinématique cherchée est donc la liaison linéaire suivante entre le champ 3D sur \(S\) et les éléments du torseur de déplacement de la poutre en \(G\) :
\(\begin{array}{ccc}\mid S\mid T-{\int}_{S}u\text{dS},& & I(\Omega )-{\int}_{S}\text{GM}\wedge u\text{dS}\end{array}=0\) éq 2.3-8
Expression de la condition statique de raccord#
En revenant à la formulation faible de l’équilibre de l’interface [éq 2.2-1], on peut en déduire les conditions nécessaires et suffisantes de raccord statique. En effet, on a:
\(\begin{array}{ccc}{\int}_{S}\sigma .n.v\text{dS}=R.{T}_{v}+M.{\Omega}_{v}& & \forall v\in V\end{array}\) éq 2.4-1
Grâce aux expressions [éq 2.3-7] et à la décomposition de l’espace \(V\) , et à la propriété [éq2.3‑5], on a immédiatement les trois équations:
\(\begin{array}{}F={\int}_{S}\sigma .n\text{dS}\\ M={\int}_{S}\text{GM}(x)\wedge \sigma .n\text{dS}\\ {(\sigma .n)}^{\sigma}=0\text{ou de manière équivalente}{\int}_{S}\sigma .n.v\text{dS}=0\text{}\forall v\in {T}^{\perp }\end{array}\) éq 2.4-2
Les conditions de raccord statique sont donc :
transmission du torseur des efforts de poutre, (satisfait la propriété P1),
nullité de la partie complémentaire (« non poutre ») du champ de vecteur contrainte 3D sur la section du solide 3D (satisfait la propriété P2).
On remarquera également la symétrie statique et cinématique (propriété P3) puisque les conditions de raccord s’interprètent également comme :
l’égalité au sens des moindres carrés entre le déplacement 3D et le déplacement de la poutre,
l’égalité au sens des moindres carrés entre le champ de vecteur contrainte et les éléments de réduction du torseur des efforts de poutre.
Implantation de la méthode de raccord#
Pour chaque raccord, l’utilisateur doit définir :
S : |
la trace de la section de la poutre sur le massif 3D : il le fait par les mots clés MAILLE_1et/ou GROUP_MA_1; c’est-à-dire qu’il donne la liste des mailles (\(\mathrm{lma}\) ) surfaciques (affectées d’éléments “bord” de modélisation 3D) qui représentent géométriquement cette section. |
P : |
un nœud (mot clé NOEUD_1ou GROUP_NO_1) portant les 6 degrés de liberté classiques de poutre : \(\mathrm{DX}\) , \(\mathrm{DY}\) , \(\mathrm{DZ}\) , \(\mathrm{DRX}\) , \(\mathrm{DRY}\) , \(\mathrm{DRZ}\) |
Remarque :
le nœud \(P\) peut être un nœud d’élément de poutre ou d’élément discret,
la liste des mailles \(\mathrm{lma}\) doit représenter **exactementla section de la poutre. C’est une contrainte importante pour le maillage.*
Pour chaque nœud, le programme calcule les coefficients des 6 relations linéaires [éq 2.3-8] qui relient:
les 6 degrés de liberté du nœud \(P\) ,
avec les degrés de liberté de tous les nœuds de \(\mathrm{lma}\) .
Ces relations linéaires seront dualisées, comme toutes les relations linéaires issues par exemple du mot clé LIAISON_DDL de AFFE_CHAR_MECA.
Le calcul des coefficients des relations linéaires se fait en plusieurs étapes :
calcul de quantités élémentaires sur les éléments de \(\mathrm{lma}\) : (OPTION: CARA_SECT_POUT3)
surface = \({\int}_{\text{elt}}1;{\int}_{\text{elt}}x;{\int}_{\text{elt}}y;{\int}_{\text{elt}}\mathrm{x2};\mathrm{...}\)
sommation de ces quantités sur \((S)\) d’où le calcul de :
\(A=\mid S\mid\)
position de \(G\)
tenseur d’inertie \(\Omega\)
connaissant \(G\) , calcul élémentaire sur les éléments de \(\mathrm{lma}\) de : (OPTION:CARA_SECT_POUT4)
\({\int}_{\text{elt}}\text{Ni};{\int}_{\text{elt}}\text{xNi};{\int}_{\text{elt}}\text{yNi};{\int}_{\text{elt}}\text{zNi}\text{où :}\begin{array}{c}\text{GM}=\left\lbrace x,y,z\right\rbrace \\ \text{Ni}=\text{fonctions de forme de l'élément}\end{array}\)
« assemblage » des termes calculés ci-dessus pour obtenir en chacun des nœuds de lma, les coefficients des termes des relations linéaires.
Le raccord 2D-poutre#
Objectif#
Comme pour le raccord 3D/poutre, l’objectif est de pouvoir représenter une partie d’une structure élancée complexe ([Figure 3.1-a]) par une poutre dont la partie à analyser est relativement « loin ». Le but de la schématisation par une poutre est d’amener des conditions aux limites réalistes aux bords de la partie modélisée et maillée en milieu continu 2D. Ces conditions aux limites peuvent être amenées par une poutre, mais aussi par des éléments discrets. Le raccord 2D/poutre doit donc satisfaire les exigences suivantes :
P1 |
Pouvoir transmettre les efforts de poutre au maillage 2D |
P2 |
Ne pas engendrer de contraintes “parasites” (voire de concentration de contraintes), car il faudrait alors placer le raccord suffisamment loin de la zone à analyser pour que ces perturbations soient atténuées dans la zone d’étude. |
P3 |
Ne pas favoriser les conditions cinématiques ou les conditions statiques de raccord l’une par rapport à l’autre. Il doit être équivalent de ramener un torseur d’effort ou de déplacement aux limites du domaine 2D. |
P4 |
Admettre des comportements quelconques de part et d’autre du raccord (élasticité, plasticité…) et permettre également une analyse dynamique. |
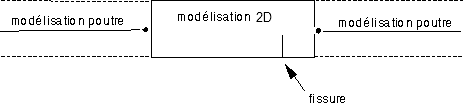
Figure 3.1-a
La démarche :
Comme pour le raccord 3D/poutre, on décompose le champ de déplacement 2D en une partie « poutre » et une partie « complémentaire ». Ceci nous amène à définir les conditions de raccord cinématique entre la poutre et la structure 2D comme l’égalité du déplacement de poutre et de la partie poutre du champ de déplacement 2D. Une fois ceci fait, on interprète ensuite en terme statique les conditions de raccord et on accéder ainsi aux conditions de raccord statique.
Le lecteur est invité à consulter le paragraphe 2 ( Le raccord 3D-poutre ) qui décrit explicitement la méthode de la démarche ci-contre. Il fera facilement le lien avec le cas 2D.
Implantation de la méthode de raccord#
Pour chaque raccord, l’utilisateur doit définir :
S : |
Le bord de la surface 2D : il se fait par les mots clés MAILLE_1et/ou GROUP_MA_1; c’est-à-dire qu’il donne la liste des mailles (\(\mathrm{lma}\) ) linéiques (affectées d’éléments “bord” de modélisation 2D) qui représentent géométriquement cette section. |
P : |
un nœud (mot clé NOEUD_1ou GROUP_NO_1) portant les 3 degrés de liberté classiques de poutre : \(\mathrm{DX}\) , \(\mathrm{DY}\) , \(\mathrm{DRZ}\) |
Remarque :
le nœud \(P\) peut être un nœud d’élément de poutre ou d’élément discret,
la liste des mailles \(\mathrm{lma}\) doit représenterla section de la poutre.
Pour chaque nœud, le programme calcule les coefficients des 3 relations linéaires [éq 2.3-8] qui relient:
les 3 degrés de liberté du nœud \(P\) ,
avec les degrés de liberté de tous les nœuds de \(\mathrm{lma}\) .
Ces relations linéaires seront dualisées, comme toutes les relations linéaires issues par exemple du mot clé LIAISON_DDL de AFFE_CHAR_MECA.
Le calcul des coefficients des relations linéaires se fait en plusieurs étapes :
calcul de quantités élémentaires sur les éléments de \(\mathrm{lma}\) : (OPTION: CARA_SECT_POUT3)
\({\int}_{\text{elt}}1;{\int}_{\text{elt}}x;{\int}_{\text{elt}}y;{\int}_{\text{elt}}{x}^{2};{\int}_{\text{elt}}{y}^{2}\)
sommation de ces quantités sur le bord \((S)\) d’où le calcul de :
\(A=\mid S\mid\)
position de \(G\)
tenseur d’inertie \(\Omega\)
connaissant \(G\) , calcul élémentaire sur les éléments de \(\mathrm{lma}\) de : (OPTION:CARA_SECT_POUT4)
\({\int}_{\text{elt}}\text{Ni};{\int}_{\text{elt}}\text{xNi};{\int}_{\text{elt}}\text{yNi};\text{où :}\begin{array}{c}\text{GM}=\left\lbrace x,y\right\rbrace \\ \text{Ni}=\text{fonctions de forme de l'élément}\end{array}\)
« assemblage » des termes calculés ci-dessus pour obtenir en chacun des nœuds de \(\mathrm{lma}\) , les coefficients des termes des relations linéaires.
Quelles utilisations peut-on faire de ces modélisations ?#
Raccord 3D-poutre et 2D-poutre#
Outre les deux utilisations visées au [§2] [Figure 2.1-a] et [Figure 2.1-b], ce raccord peut aussi être utilisé pour:
appliquer un torseur d’efforts sur une surface connue d’une modélisation 3D:
Pour cela, l’utilisateur définit la surface d’application de l’effort (\(\mathit{lma}\) ), il la « raccorde » avec un nœud (\(P\) ) d’élément discret (DIS_TR_N) sans rigidité puis il applique le torseur voulu sur ce nœud (FORCE_NODALE).
De cette façon, le torseur est appliqué en « douceur », sans engendrer de contraintes parasites sur la surface.
« retenir » une structure sans trop l’encaster :
Par exemple, si l’on a maillé en 3D un tuyau et que l’on veut empêcher ses mouvements de corps solide

on raccorde \((S)\) à \(P\) puis on bloque les 6 degrés de liberté de \(P\) .
La structure est alors retenue, sans que \((S)\) soit encastrée. En particulier, la section \((S)\) peut s’ovaliser.
Bibliographie#
ANDRIEUX: « Raccords Poutre 3D, Coque 3D et généralisations ». Note EDF/DER/IMA/MMN HI-70/97/001/0, 1997.
Doc R3.03.06. Liaison coque-poutre.
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
3 |
J. PELLET (EDF/IMA/MMN) |
Texte initial |