r7.01.21 Loi de comportement (en 2D) pour la liaison acier –béton : JOINT_BA#
Résumé:
La loi de comportement JOINT_BA décrit le phénomène de dégradation et de rupture de la liaison entre les barres d’acier et le béton, dans les structures en béton armé. Cette documentation présente l’écriture théorique dans le cadre thermodynamique et l’intégration numérique de la loi, ainsi que les paramètres qui gèrent le modèle.
Pour son utilisation, on s’appuiera sur les éléments finis de type joint (voir le document[R3.06.09]) déjà existants dans le code.
Brève description de la liaison acier-béton#
Conceptuellement, le phénomène de liaison correspond à l’interaction physique de deux matériaux différents, qui se produit sur une zone d’interface en permettant le transfert et la continuité des efforts et des contraintes entre les deux corps en contact. Dans le cas des structures en béton armé, ce phénomène est aussi connu comme la «rigidité de tension» qui se développe autour d’un élément de renforcement, partiellement ou totalement noyé dans un volume de béton. Les forces de traction qui apparaissent à l’intérieur du renforcement sont transformées en contraintes de cisaillement sur la surface, et sont transmises directement au béton en contact qui va les équilibrer finalement, et vice-versa. La réponse de l’ensemble va dépendre de la capacité du béton à se déformer autant que l’acier, puisque l’acier aura tendance à glisser à l’intérieur du béton l’entourant. Le phénomène de liaison correspond à cette capacité du béton à se déformeret à se dégrader localement en créant une espèce de couche, ou enveloppe, autour du renforcement, dont les propriétés cinématiques et matérielles diffèrent de celles du reste du béton ou du renforcement employé.
Le phénomène peut être décomposé en trois mécanismes bien définis:
une adhérence d’origine chimique,
un mécanisme de frottement entre deux surfaces rugueuses (acier-béton ou béton-béton),
une action mécanique créée par la présence des nervures de la barre d’acier sur le béton avoisinant.
D’après cette décomposition, on peut déduire clairement que pour une barre lisse, le mécanisme prépondérant est le frottement entre les deux matériaux, tandis que pour une barre nervurée (en français couramment appelée «armature HA: Haute Adhérence»), le mécanisme dominant est l’interaction mécanique entre surfaces. Lorsque le renforcement est constitué par les torons avec des câbles en acier, il est possible de contrôler ou de combiner les différents mécanismes puisqu’ils sont fonction directement de la surface des câbles.
La liaison va subir une dégradation différente selon le type de chargement appliqué, soit monotone, soit cyclique. Par ailleurs, parmi les paramètres les plus importants qui influencent le comportement de la liaison, on peut citer:
les caractéristiques du chargement,
les caractéristiques géométriques de la barre d’acier,
l’espacement entre barres actives,
les caractéristiques du béton,
le confinement par renforcement passif,
la pression latérale.
Lors de l’étude d’une barre cylindrique noyée dans un milieu infini, on peut identifier la surface de discontinuité où on va placer les effets de la liaison, qui se développe dans une certaine zone de béton fissuré et écrasé autour de la barre d’acier. A un moment donné, cette surface correspondra à la fissure cylindrique créée lors de la coalescence des fissures de cisaillement. En regardant le réseau des fissures, on peut supposer que, en conditions idéales, le plan de fissuration est toujours perpendiculaire (direction normale) à la surface de la barre et parallèle (direction tangentielle) à son axe longitudinal (voir Fig. 210). Cela nous permet de projeter les composantes du déplacement sur la direction normale et tangentielle du plan de fissuration, et par conséquent d’obtenir les déformations et contraintes correspondantes.


Fig. 210 Description réelle du phénomène de liaison et simplification éléments finis: coordonnées dans le repère local de l’élément d’interface utilisé comme support de la loi JOINT_BA#
Écriture théorique#
La formulation présentée ici a été développée dans le cadre de la thermodynamique des processus irréversibles; elle donne la relation constitutive entre l’effort normal, la contrainte de cisaillement et le glissement en considérant l’influence de la fissuration du béton, le frottement et les divers couplages dans le phénomène. Pour cela, les relations constitutives qui relient le tenseur des contraintes et le tenseur des déformations doivent inclure :
la fissuration du matériau d’interface par cisaillement
les déformations inélastiques à cause du glissement
le comportement hystérétique dû au frottement
le couplage entre la réponse tangentielle et les contraintes normales
Présentation du modèle#
On se place dans le cadre d’une formulation plane en 2D, dans le repère local défini Fig. 210. Les tenseurs des contraintes \(\sigma\) et des déformations \(\varepsilon\) s’écrivent :
où \({\sigma}_{N}\) est la contrainte normale et \({\sigma}_{\tau}\) est la contrainte tangentielle de l’élément d’interface; \({\varepsilon}_{N}\) correspond à la déformation normale et \({\varepsilon}_{\tau}\) à la déformation tangentielle. La déformation normale dans la direction tangentielle à l’interface est considérée comme nulle. Ce mode de déformation pour un élément d’adhérence est à énergie de déformation nulle.
Les comportements normaux et tangentiels étant considérés comme découplés au niveau de l’état, le potentiel thermodynamique obtenu à partir de l’énergie libre de Helmholtz s’exprime de la façon suivante :
où \(\rho\) est la densité, \(E\) est le module d’Young, \({D}_{N}\) est la variable interne d’endommagement normal et \({D}_{T}\) la variable interne d’endommagement tangentiel, les deux étant liées à la fissuration et comprise entre 0 et 1. \(G\) est le module de rigidité ou de cisaillement, \({\varepsilon}_{T}^{f}\) est la déformation irréversible induite par glissement avec frottement des fissures, \(\alpha\) est la variable interne d’écrouissage cinématique, \(\gamma\) est un paramètre matériau et \(z\) , la variable de pseudo «écrouissage isotrope» par endommagement, avec sa fonction de consolidation \(H(z)\) . \({\langle \rangle }_{-}\) et \({\langle \rangle }_{+}\) définissent respectivement les parties positives et négatives du tenseur considéré.
On peut remarquer dans l’équation (4901) que dans la direction normale, l’endommagement sera activé lors de l’apparition des déformations positives produites par des forces de traction, tandis que si les déformations sont négatives à cause des effets de compression, le comportement restera élastique. En ce qui concerne la partie tangentielle du comportement, on peut reconnaître un couplage classique élasticité–endommagement ainsi qu’un nouveau terme permettant d’associer à l’état élasticité-endommageable, un état de glissement avec frottement. Le couplage entre glissement et fissuration est possible grâce à la présence de la variable d’endommagement comme multiplicateur dans le second élément de la partie droite de l’équation (4901).
Les lois d’état sont obtenues classiquement par dérivation du potentiel thermodynamique, et ainsi permettent de définir les variables thermodynamiques associées. La contrainte normale s’exprime comme :
et la contrainte tangentielle totale comme :
On peut également définir la contrainte tangentielle due au glissement avec frottement(déformation \({\varepsilon}_{\tau}^{s}\) ):
Remarque:
Une telle formulation s’éloigne amplement d’une formulation classique de couplage plasticité – endommagement. L’hypothèse amenant à l’introduction de l’endommagement dans la contrainte par glissement se base sur une constatation expérimentale qui est que tous les phénomènes inélastiques dans un matériau fragile proviennent de la croissance des fissures.
Le taux d’énergie restituée par endommagement-frottement peut être écrit comme:
Dans cette dernière expression, \({\mathrm{\Upsilon }}_{\mathrm{DT}}\) correspond au taux d’énergie restituée par endommagement et \({\mathrm{\Upsilon }}_{\text{fT}}\) au taux d’énergie restituée par frottement des fissures.
La loi d’état de l’écrouissage cinématique amène à la définition de la contrainte de rappel:
Concernant la loi d’écrouissage de l’endommagement isotrope, elle est exprimée par:
Il nous faut maintenant expliciter d’une façon plus détaillée l’évolution du mécanisme d’endommagement dans la liaison, autrement dit préciser l’expression de \(H(z)\) . Pour une faible valeur d’endommagement, le mécanisme qui prédomine est l’interaction du béton avec les nervures de la barre d’acier, tandis que pour une valeur beaucoup plus grande, c’est le frottement entre le béton et l’acier qui prévaut. Lors de l’évolution de l’endommagement, 2 phases principales pourront être identifiées:
la première phase correspond à une croissance stable de fissures transversales liées à la présence de nervures sur l’acier (écrouissage apparent positif de la loi d’évolution),
la seconde ne fait plus intervenir que la coalescence de ces fissures transversales amenant à ne plus considérer que les mécanismes de frottement (écrouissage négatif vers une contrainte de frottement résiduelle).
Analyse de l’endommagement dans la direction tangentielle#
La loi d’évolution de l’endommagement est divisée en trois étapes:
région d’adhérence parfaite,
région de passage de petites déformations aux grands glissements,
région de résistance maximale de la liaison et dégradation jusqu’à la résistance résiduelle ultime.
Pour identifier ces régions, on établit deux seuils:
le seuil d’adhérence parfaite \({\varepsilon}_{T}^{1}\) ,
le seuil de continuité avant coalescence des fissures \({\varepsilon}_{T}^{2}\) .
Ainsi, en reprenant les expressions liées à l’endommagement à savoir celle du taux de restitution d’énergie (4905) et celle de la variable interne associée à l’écrouissage isotrope (4287), on peut noter :
une vraie séparation entre l‘endommagement et le frottement des fissures (ce qui permet de modifier uniquement la loi d’évolution de l’endommagement sans affecter la partie «frottement»),
la partition en deux parties de l’écrouissage isotrope puisqu’on a deux étapes différentes dans l’endommagement.
Désormais nous écrirons pour l’écrouissage lié à la variable d’endommagement:
Les composantes \(Z_{\mathrm{T1}}\) et \(Z_{\mathrm{T2}}\) s’expriment de la façon suivante:
On définit également la fonction seuil \({\varphi}_{\mathrm{DT}}\) qui dépend de \({\mathrm{\Upsilon }}_{\mathrm{DT}}\) et qui s‘écrit comme:
Les seuils qui gèrent la loi d’évolution de l’endommagement sont exprimés aussi en termes de \({\mathrm{\Upsilon }}_{\mathrm{DT}}\) (voir Fig. 211). La première expression correspond au seuil d’adhérence parfaite et s‘écrit:
Où \({Y}_{\mathit{T1}}\) est le seuil initial d’endommagement défini en fonction de la déformation limite d’adhérence parfaite \({\varepsilon}_{T}^{1}\) , qui correspondra à la déformation limite de cisaillement –ou de traction – du béton avant l’initialisation de l’endommagement. Par ailleurs, \({Y}_{\mathit{T2}}\) est le seuil d’initiation de coalescence de micro‑fissures qui est défini en fonction de la déformation tangentielle initiale des grands glissements \({\varepsilon}_{T}^{2}\) :
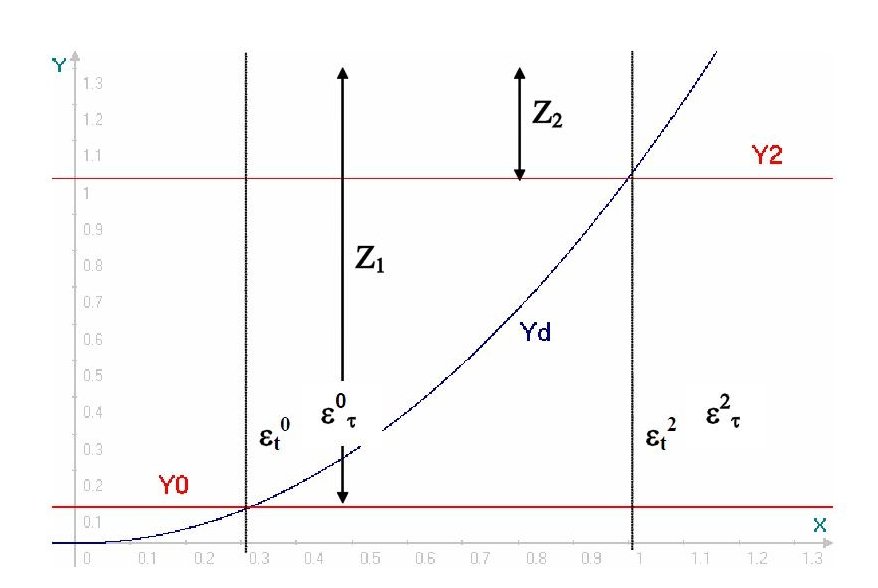
Fig. 211 Construction des fonctions seuils en termes d’énergie#
Les lois d’évolution des variables internes dans le cadre des lois associées standard permettent d’obtenir la dérivée du multiplicateur d’endommagement \({\lambda}_{D}\) :
En utilisant par ailleurs la condition de consistance, on obtient l’expression de l’endommagement:
\({D}_{T}=1-\sqrt{\frac{{Y}_{\mathit{T1}}}{{Y}_{\mathit{DT}}}}\cdot \exp\left\lbrace {A}_{{1}_{\mathit{DT}}}\cdot {\left[\sqrt{\frac{2}{G}}\cdot (\sqrt{{Y}_{\mathit{DT}}}-\sqrt{{Y}_{\mathit{T1}}})\right]}^{{B}_{\mathrm{1DT}}}\right\rbrace \mathrm{\ast }\)
Dans cette expression, on peut identifier la partie qui correspond à la région du passage des \({A}_{{1}_{\mathrm{DT}}}\) petites déformations aux grands glissements avec deux paramètres et \({B}_{{1}_{\mathrm{DT}}}\) , ainsi que la partie d’endommagement finale en mode 2, avec les paramètres \({A}_{{2}_{\mathrm{DT}}}\) et \({B}_{{2}_{\mathit{DT}}}\) . Il faut noter que la relation \(\langle {Y}_{\mathit{DT}}-{Y}_{\mathit{T1}}\rangle\) est gérée par une fonction de Macaulay , c’est-à-dire que cette différence d’énergie doit être toujours positive ou nulle.
Les fonctions qui gèrent l’écrouissage isotrope dans la direction tangentielle sont exprimées comme:
D’après ces expressions, on peut remarquer que \(Z_{\mathrm{T2}}\) n’est pas prise en compte dans la région de transition des petites déformations à grands glissements.
Analyse de l’endommagement dans la direction normale#
Les deux mécanismes les plus importants qui peuvent apparaître sur la direction normale sont le détachement entre le béton et les barres d’acier, et la pénétration de l’armature dans le corps du béton. Ces deux conditions peuvent être interprétées respectivement comme une ouverture ou une fermeture de fissure, et peuvent être décrites par une loi de comportement particulière dans la direction normale découplée du comportement tangentiel.
Afin de simplifier la résolution pour la compression entre surfaces, on a décidé de permettre une petite pénétration entre celles-ci, ce qui implique que \({\varepsilon}_{N}\le 0\) , et en adoptant une loi de comportement élastique, on aura:
Le cas de la décohésion de l’interface peut être décrit par un comportement endommageable dans la direction normale, soit :
avec \({D}_{N}\) variable scalaire de l’endommagement dans la direction normale, calculée avec l’expression suivante:
Dans cette expression, deux paramètres matériau, \({A}_{\mathit{DN}}\) et \({B}_{\mathit{DN}}\) , contrôlent la décohésion par l’endommagement en traction du béton. Par ailleurs, \({Y}_{\mathit{N1}}\) est le seuil d’endommagement défini en terme d’énergie, équivalent au seuil élastique dans la direction normale \({Y}_{\text{elas}}{\mid}_{N}\) et qui s’exprime comme:
\({\varepsilon}_{N}^{1}\) étant la déformation limite d’adhérence parfaite, qui correspond à la déformation limite du béton en traction avant l’initialisation de l’endommagement. Il faut mentionner que lorsque le détachement – ou l’ouverture de fissure – atteint la valeur maximale de la résistance à traction, aucune force de cisaillement ne devra être transmise entre les deux matériaux: c’est est l’unique condition dans laquelle la variable scalaire d’endommagement dans la direction tangentielle devient 1 à cause de l’endommagement dans la direction normale
Analyse de la contribution des frottement de fissures par glissement#
En ce qui concerne la partie “glissement” de la formulation, on suppose qu’elle a un comportement pseudo-plastique, avec écrouissage cinématique non linéaire. Initialement introduit par Armstrong & Frederick , 1966, cf. [bib1], l’écrouissage cinématique non linéaire permet à la formulation de surmonter le principal désavantage de la loi d’écrouissage cinématique de Prager , à savoir, la linéarité de la loi d’état qui relie les forces associées à l’écrouissage cinématique. Ici, les termes non linéaires sont ajoutés dans le potentiel de dissipation. Le critère de glissement prend la forme classique de la fonction seuil de Drucker-Prager qui prend en compte l’effet du confinement radial sur le glissement:
Ici \(X\) est la contrainte de rappel, \(c\) est un paramètre lié au matériau, traduisant l’influence du confinement, tandis que \({I}_{1}\) correspond au premier invariant du tenseur des contraintes, qui pour notre cas s’exprime comme:
Par ailleurs, le seuil initial pour le glissement est 0. De plus, en considérant le principe de dissipation plastique maximale, les lois d’évolution peuvent être dérivées de l’expression du potentiel plastique qui est:
Où \(a\) est un paramètre matériau. Il faut mentionner que le terme quadratique en \(\mathrm{\chi }\) permet d’introduire la non-linéarité de l’écrouissage cinématique. Les lois d’évolution pour la déformation de glissement ainsi que pour l’écrouissage cinématique prennent les formes suivantes:
Le multiplicateur de glissement \(\dot{{\lambda}_{f}}\) est calculé numériquement par imposition de la condition de consistance.
Résumé des équations#
Nous montrons ici, un résumé des équations qui constituent la loi de comportement de la liaison acier‑béton:
Énergie Libre de Helmholtz |
\(\begin{array}{c}\rho .\psi =\frac{1}{2}[{\langle {\varepsilon}_{N}\rangle }^{-}E{\langle {\varepsilon}_{N}\rangle }^{-}+{\langle {\varepsilon}_{N}\rangle }^{+}E.(1-{D}_{N}){\langle {\varepsilon}_{N}\rangle }^{+}\\ +{\varepsilon}_{T}G(1-{D}_{T}){\varepsilon}_{T}+({\varepsilon}_{T}-{\varepsilon}_{T}^{f})G.{D}_{T}({\varepsilon}_{T}-{\varepsilon}_{T}^{f})+\gamma {\alpha}^{2}]+H(z)\end{array}\) |
Fonction seuil |
\(\begin{array}{c}{\varphi}_{\mathit{DT}}={Y}_{\mathit{DT}}-({Y}_{\mathit{T1}}+{Z}_{T})\le 0;\\ {\varphi}_{f}=\mid {\sigma}_{T}^{f}-X\mid +c.{I}_{1}\le 0\end{array}\) |
Lois d’état |
\(\begin{array}{c}{\sigma}_{N}=\left\{ \begin{array}{cc}E.{\varepsilon}_{N}& \text{si}{\varepsilon}_{N}\le 0\\ (1-{D}_{N}).E.{\varepsilon}_{N}& \text{si}{\varepsilon}_{N}>0\end{array}\right. ;\\ {\sigma}_{T}=G(1-{D}_{T}){\varepsilon}_{T}+G.{D}_{T}({\varepsilon}_{T}-{\varepsilon}_{T}^{f});\\ {\sigma}_{T}^{f}=G.{D}_{T}({\varepsilon}_{T}-{\varepsilon}_{T}^{f})\end{array}\) |
Dissipation |
\(\begin{array}{c}-Y=-\rho \frac{\partial \psi }{\partial D}=-({Y}_{D}+{Y}_{f});\\ X=\rho \frac{\partial \psi }{\partial \alpha }=\gamma \alpha ;\\ Z=\rho \frac{\partial \psi }{\partial z}={H}^{'}(z)\end{array}\) |
Lois d’évolution |
\(\begin{array}{c}\dot{D}={\dot{\lambda}}_{D}.\frac{\partial {\varphi}_{D}}{\partial {Y}_{D}}={\dot{\lambda}}_{D};\dot{z}={\dot{\lambda}}_{D}.\frac{\partial {\varphi}_{D}}{\partial Z}=-{\dot{\lambda}}_{D};\\ {\dot{\varepsilon}}_{T}^{f}={\dot{\lambda}}_{f}.\frac{\partial {\varphi}_{f}^{p}}{\partial {\sigma}_{T}^{f}};\dot{\alpha}={\dot{\lambda}}_{f}.\frac{\partial {\varphi}_{f}^{p}}{\partial X}\end{array}\) |
Expression de la matrice tangente#
Afin d’assurer la robustesse et l’efficacité du modèle dans l’implantation numérique et pour l’analyse globale des structures massives, il faut calculer la matrice tangente, laquelle peut être déterminée à partir de l’expression suivante :
Après quelques calculs analytiques, on peut déduire l’expression du module tangent en utilisant la condition de consistance et les lois d’évolution respectives :
Avec
Où \(f,g\) et \(h\) sont les fonctions suivantes, obtenues grâce à (4295):
Remarque:
En pratique dans Aster, la matrice tangente n’a pas été implantée, seule la matrice sécante est utilisée soit \(H=\begin{pmatrix}E(1-{D}_{N})& 0\\ 0& G(1-{D}_{T})\end{pmatrix}\) .
Intégration numérique#
La séparation en deux parties dans la formulation: endommagement – glissement, nous permet de traiter séparément chacune d’elle. Ainsi, l’intégration de la partie endommagement est réalisée de façon explicite par la définition des deux surfaces seuil. Par contre, la partie “glissement” est résolue de manière implicite par une méthode classique à savoir l’algorithme de type “return-mapping” proposé par Ortiz & Simo , Cf [bib4], qui va assurer la convergence de façon efficace.
Calcul de la partie « frottement des fissures » avec une méthode d’intégration implicite#
Les effets sur la liaison associés au phénomène de frottement des fissures peuvent être calculés dans le cadre d’un comportement pseudo-plastique avec un écrouissage cinématique non linéaire. Pour l’implantation avec la méthode d’intégration proposée, nous allons effectuer une linéarisation de la fonction seuil autour des valeurs actuelles des variables internes associées. À l’itération \((i+1)\) , la surface seuil s’écrit:
D’après les équations (4286), (4287), et (3261), on a:
Qu’on peut discrétiser de la manière suivante:
En combinant ces expressions avec l’expression de la surface seuil et en écrivant que est égale \({\varphi}_{f}\) à zéro, on peut déduire l’incrément de multiplicateur \(\Delta {\lambda}_{f}\) à chaque itération \(i\) :
Après l’obtention de la valeur de \({\mathrm{\Delta \lambda }}_{f}\) , on peut la substituer dans les équations (4584) et (4585) afin d’actualiser les forces thermodynamiques \({\sigma}_{T}^{f}\) et \(\mathrm{\chi }\) . Les itérations devront continuer jusqu’au moment où la condition de consistance est vérifiée.
L’algorithme de résolution#
De façon générale, on cherche à vérifier l’équilibre de la structure à chaque instant, sous une forme incrémentale. Comme explicité précédemment, pour l’endommagement une simple équation scalaire permet d’obtenir la valeur correspondante, ce qui permet d’éviter un recours aux méthodes itératives. Par contre, une méthode itérative est appliquée pour l’intégration de la partie frottement des fissures. Alors, l’algorithme est le suivant:
|
|

|
|
|
|

; 
; \({\alpha}_{n+1}^{(0)}={\alpha}_{n}\) |
|
|
|

|
|
si OUI, fin du cycle ; si NON, début des itérations |
|
OUI: |

; 
; \({\alpha}_{n+1}={\alpha}_{n+1}^{(0)}\) ; 
|
NON: |

\(\Delta {\lambda}_{f}=\frac{{({\varphi}_{f})}_{n+1}^{(i)}}{{(\partial {\varphi}_{f}/\partial {\sigma}_{T}^{f})}_{n+1}^{(i)}G.{D}_{T}{(\partial {\varphi}_{f}^{p}/\partial {\sigma}_{T}^{f})}_{n+1}^{(i)}+{(\partial {\varphi}_{f}/\partial X)}_{n+1}^{(i)}.\gamma .{(\partial {\varphi}_{f}^{p}/\partial X)}_{n+1}^{(i)}}\) |
|
|
\({\sigma}_{n+1}^{(i+1)}={\sigma}_{n+1}^{(i)}-G.{D}_{T}.\Delta {\lambda}_{f}.{(\partial {\varphi}_{f}^{p}/\partial {\sigma}_{T}^{f})}^{(i)}-\gamma .\Delta {\lambda}_{f}.{(\partial {\varphi}_{f}^{p}/\partial X)}^{(i)}\) |
|
\({\alpha}_{n+1}^{(i+1)}={\alpha}_{n+1}^{(i)}+\Delta {\lambda}_{f}.{(\partial {\phi }_{f}^{p}/\partial X)}^{(i)}\) |
|
|
|
\({({\phi }_{f})}_{n+1}^{(i+1)}\le \mathrm{TOL}∣{({\phi }_{f})}_{n+1}^{(0)}∣?\) |
|
si OUI, fin du cycle ; si NON, continuer les itérations en (iv) |
|
OUI: |

; \({\alpha}_{n+1}={\alpha}_{n+1}^{(i+1)}\) ; 
; 
|
NON: |

|
Variables internes du modèle#
Nous montrons ici les variables internes stockées en chaque point de Gauss dans l’implémentation du modèle:
Numéro de variable interne |
Sens physique |
1 |
\({D}_{N}\) : Variable scalaire de l’endommagement dans la direction normale |
2 |
\({D}_{T}\) : Variable scalaire de l’endommagement dans la direction tangentielle |
3 |
\({z}_{\mathit{T1}}\) : Variable scalaire de l’écrouissage isotrope pour l’endommagement en mode 1 |
4 |
\({z}_{\mathrm{T2}}\) : Variable scalaire de l’écrouissage isotrope pour l’endommagement en mode 2 |
5 |
\({\varepsilon}_{T}^{f}\) : Déformation de glissement cumulée par frottement des fissures |
6 |
\(\alpha\) : Valeur de l’écrouissage cinématique par frottement des fissures |
Paramètres de la loi#
La loi de comportement ici présentée est contrôlée par 14 paramètres, dont 3 gèrent la réponse dans la direction normale et les autres affectent la réponse dans la direction tangentielle. Par ailleurs, le module d’Young est récupéré à partir des données élastiques fournies par l’opérateur ELAS, qui doit toujours apparaître dans le fichier de commandes.
Ces paramètres, ou les expressions analytiques qui permettent de les obtenir, ont été obtenus ou déterminés à partir de la simulation numérique des tests expérimentaux effectués par Eligehausen et al. , 1983, Cf [bib3]. La réalisation de multiples simulations a permis de déterminer une relation entre les caractéristiques géométriques et matérielles des matériaux en question (acier et béton) et les paramètres qui gèrent le modèle de l’interface.
Les paramètres initiaux#
Le paramètre « hpen »#
L’élément joint fonctionnant sur la notion de saut de déplacement, il est nécessaire d’introduire une dimension caractéristique de la zone d’interface dégradée permettant de définir la notion de déformation dans l’interface. Pour ce faire il a été introduit le principe de pénétration entre surfaces: le paramètre « \(\mathit{hpen}\) » permet de définir cette zone entourant la barre d’acier. Ce paramètre correspond à la pénétration maximale possible qui dépend de l’épaisseur du béton comprimé - écrasé. En même temps, « \(\mathit{hpen}\) » gère la dissipation d’énergie dans l’élément ainsi que la cinématique du glissement.
Afin de donner une référence à l’utilisateur pour le choix de ce paramètre, on propose de le calculer à partir du diamètre de la barre \({d}_{b}\) et l’aire relative des nervures \({\alpha}_{\text{sR}}\) définie par :
où \(k\) est le nombre de nervures sur le périmètre; \({F}_{R}\) l’aire transversale d’une nervure; \(\mathrm{\beta }\) est l’angle entre la nervure et l’axe longitudinale de la barre d’acier; et \(c\) est la distance entre nervures mesurée centre à centre. Finalement, « \(\mathit{hpen}\) » sera calculé avec l’expression:
D’après Eligehausen et al. , les armatures couramment utilisées aux Etats Unis ont des valeurs de \({\alpha}_{\text{sR}}\) entre \(0.05\) et \(0.08\) . Pour les barres lisses, étant donné que l’on a besoin d’une valeur petite de « hpen », on propose des valeurs de \({\alpha}_{\text{sR}}\) entre \(0.005\) et \(0.02\) .
Le tableau suivant donne les valeurs de « \(\mathit{hpen}\) » en fonction du diamètre de la barre :
Diamètre ( \(\mathit{mm}\) ) |
Aire relative |
\(\mathit{Hpen}\) ( \(\mathit{mm}\) ) |
Description |
8 |
0.01 |
(0.08) 0.1 |
Barre commerciale lisse |
8 |
0.08 |
0.64 |
Barre commerciale nervurée |
20 |
0.08 |
1.50 |
Barre commerciale nervurée |
25 |
0.08 |
2.00 |
Barre commerciale nervurée |
32 |
0.08 |
2.54 |
Barre commerciale nervurée |
L’unité de «hpen» doit bien sûr correspondre à l’unité utilisée pour le maillage.
Le paramètre \(G\) ou module de rigidité de la liaison#
Généralement, du fait de la difficulté de mesurer les déformations par cisaillement, le module de rigidité d’un matériau est calculé à partir du module d’Young et du coefficient de Poisson, paramètres courants obtenus expérimentalement. Cependant, pour notre cas, l’interface est un pseudo-matériau dont les caractéristiques doivent dépendre des propriétés correspondantes aux matériaux en contact, acier et béton. Etant donné que le matériau que l’on s’attend à endommager est le béton, on propose d’utiliser initialement pour la liaison la même valeur de \(G\) que pour le béton étudié mais elle peut être supérieure jusqu’à une valeur similaire à la valeur du module d’Young \(E\) , lorsqu’on augmente la valeur de «hpen». Dans le cas des armatures avec des rigidités supérieures à celles des barres commerciales courantes (du fait d’une disposition ou géométrie spéciale des nervures), on peut faire une correction de la valeur choisie, en multipliant le module de rigidité par un coefficient de correction calculé à partir des aires relatives des barres commerciales, avec l’expression:
Alors, le module de rigidité de la liaison \(G\) sera:
Dans les dernières expressions, \({G}_{\text{lia}}\) est le module de rigidité de la liaison ; \({G}_{\text{beton}}\) est le module de rigidité du béton; \({C}_{\text{arm}}\) est le coefficient de correction par armature; \(({\alpha}_{\text{SR}})\text{barre}\) , aire relative des nervures de la barre concernée; et \(({\alpha}_{\text{SR}}){\text{barre}}_{\text{com}}\) , aire relative des nervures de la barre commerciale du même diamètre (de préférence, \(0.08\) ).
Les paramètres d’endommagement#
La limite de déformation élastique \({\varepsilon}_{T}^{1}\) ou seuil d’adhérence parfaite#
Pour définir le seuil d’adhérence parfaite, on considère que l’endommagement par cisaillement doit s’initier lors du dépassement d’un certain seuil de déformation. De ce fait, on propose d’adopter les déformations limites du béton en traction, c’est-à-dire, entre \(1\times {10}^{-4}\) et \(0.5\times {10}^{-3}\) , qui correspondent aux contraintes de cisaillement entre \(0.5\) et \(4\mathit{MPa}\) en adhérence parfaite.
Le paramètre d’endommagement \({A}_{\mathrm{1DT}}\) pour le passage des petites déformations aux grands glissements#
Dans cette région, la loi d’évolution de l’endommagement est exprimée en terme de déformations et sa construction dépend de la pente élastique définie pour le comportement linéaire (contrainte de cisaillement versus déformation) dans la région d’adhérence parfaite: ce paramètre contrôle la valeur de la contrainte par rapport au glissement dans le passage de petites déformations aux grands glissements.
La détermination de la valeur de ce paramètre est un point clé et délicat du modèle, puisque l’évolution de l’endommagement doit s’effectuer avec certaines conditions remarquées par plusieurs chercheurs; par exemple :
la résistance de la liaison est directement proportionnelle à la résistance à la compression du béton. Cependant, au fur et à mesure que l’on augmente la résistance du béton, le comportement devient plus rigide, amenant à la rupture fragile de la liaison,
la rigidité particulière de l’armature, qui est liée au diamètre et à la quantité des nervures sur la surface, doit augmenter la résistance de la liaison,
la relation entre les modules d’élasticité des deux matériaux concernés doit gérer directement la cinématique de la liaison.
A partir des simulations numériques que l’on a effectuées, on a observé que cette valeur est située entre un minimum de 1 et un maximum de 5, et qu’elle devra être ajustée en fonction du test de référence choisi. Facultativement, on propose une expression qui permet d’adopter une valeur initiale et qui dépend des caractéristiques propres des matériaux:
Dans la dernière expression, \({E}_{b}\) sera calculé avec l’expression fournie dans la section A.2.1,2 de BAEL’91:
Dans les deux dernières expressions, on a:
\(f'c\) , résistance à la compression du béton en \(\mathit{MPa}\) ;
\({E}_{a}\) , module d’élasticité de l’acier, en \(\mathit{MPa}\) ;
\({E}_{b}\) , module d’élasticité du béton, en \(\mathit{MPa}\) ;
\({\alpha}_{\text{sR}}\) , aire relative des nervures de la barre concernée.
La Fig. 212 en donne une comparaison graphique.
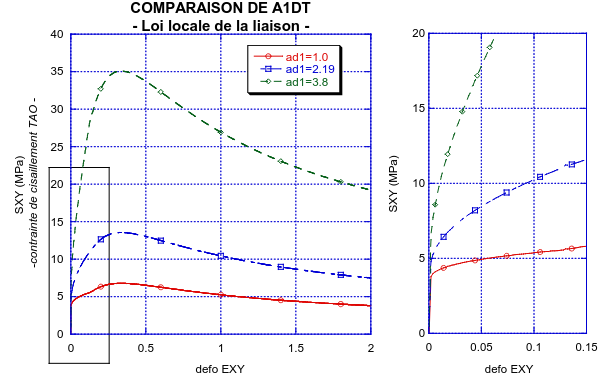
Fig. 212 Comparaison de \({A}_{\text{1DT}}\) : croissance de la résistance de la liaison#
Le paramètre d’endommagement \({B}_{\mathrm{1DT}}\)#
Ce paramètre a pour but d’adoucir l’allure de la courbe de comportement, ainsi que de faciliter la transition de la pente élastique vers la région non linéaire. Elle peut avoir une valeur comprise entre \(0.1\) et \(0.5\) (jamais supérieure à \(0.5\) puisque c’est l’équivalent de la racine carrée de la formule).On peut conseiller d’adopter la valeur de \(0.3\) pour des calculs ordinaires. (Voir Fig. 213).
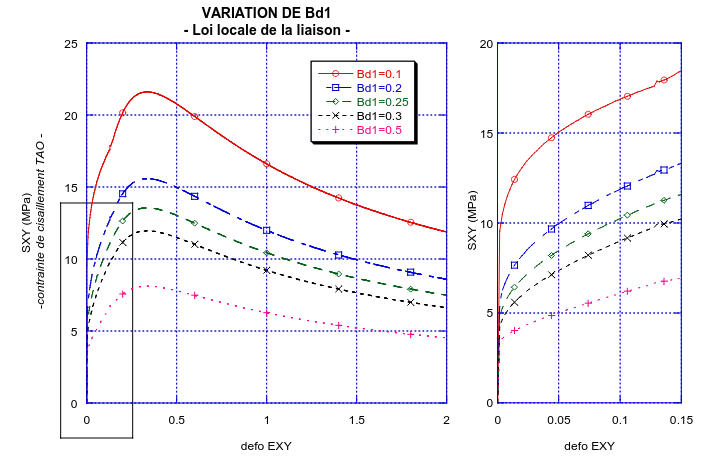
Fig. 213 Comparaison de \({B}_{\text{1DT}}\) : modification de la courbure#
La limite de déformation \({\varepsilon}_{T}^{2}\) ou seuil des grands glissements#
Selon plusieurs auteurs, les grands glissements sont globalement supérieurs à \(1\mathit{mm}\) de déplacement, mais cela est un indicateur qui dépend de la forme et des dimensions des spécimens testés; donc, on propose que cette déformation ne dépasse jamais \(1.00\) (valeur adimensionnelle). De façon plus précise, on propose d’appliquer l’expression suivante:
Dans cette expression, on a appliqué une fonction sigmoïde dont les coefficients \(C\) et \(n\) permettent d’ajuster l’effet cinématique de \({A}_{\mathrm{1DT}}\) sur le glissement, c’est-à-dire, lorsque la liaison devient plus résistante à cause d’une augmentation de rigidité, le glissement se réduit graduellement. On a adopté les valeurs \(9.0\) et \(4.0\) respectivement, mais elles sont toujours facultatives.
Le choix de la valeur de la limite de déformation \({\varepsilon}_{T}^{2}\) est très important car il introduit une plus ou moins grande fragilité de la réponse par translation du seuil de passage des petites déformations aux grands glissements. Cette fragilité est liée à la raideur du béton par l’intermédiaire du paramètre \({A}_{\mathrm{1DT}}\) . Il faut noter que les paramètres suivants qui gèrent l’endommagement doivent être aussi ajustés au niveau local pour assurer la continuité correcte du comportement en cisaillement de la liaison et pouvoir ainsi obtenir la réponse souhaitée ou attendue d’un système réel acier – liaison – béton.
Le paramètre d’endommagement \({A}_{\mathrm{2DT}}\)#
L’endommagement, tel qu’il a été conçu dans le modèle, obéit à deux lois d’évolution qui sont exprimées à l’aide d’une seule variable scalaire classique qui va assurer la cohérence de l’endommagement. Les paramètres de chacune des 2 lois sont indépendants et numériquement stables, mais ils sont susceptibles d’engendrer des erreurs graves dans la continuité du comportement si on ne prête pas attention à l’allure de la courbe locale contrainte - déformation: voir le cas de la courbe montrée dans le graphique de la Fig. 214, avec une valeur \({A}_{\text{2DT}}=1\times {10}^{-3}{\mathit{MPa}}^{-1}\) . Nous ne sommes pas capables de proposer une relation analytique pour le choix de ce paramètre, mais l’expérience acquise nous permet d’affirmer que la valeur de ce paramètre doit être comprise entre \(1\times {10}^{-3}\) et \(9\times {10}^{-2}{\mathit{MPa}}^{-1}\) approximativement.

Fig. 214 Comparaison de \({A}_{\text{2DT}}\) : endommagement et rupture de la liaison#
Le paramètre d’endommagement \({B}_{\mathrm{2DT}}\)#
Ce paramètre, qui complète la loi d’évolution d’endommagement en grands glissements, contrôle non seulement la croissance de la résistance de la liaison ou l’allure de la courbe de comportement au pic et dans la région post-pic, mais aussi la cinématique de la réponse, ce qui implique la détermination du glissement pour la contrainte de cisaillement maximale ainsi que l’amplitude de la courbe au pic du comportement. Alors, bien que les valeurs des paramètres d’endommagement \({A}_{\text{2DT}}\) et \({B}_{\text{2DT}}\) devront s’ajuster en même temps lorsqu’on construit la courbe de comportement de la liaison afin de respecter la continuité de l’allure, on peut dire que la valeur de \({B}_{\text{2DT}}\) est inversement proportionnelle à l’amplitude de glissement au sommet, c’est-à-dire, une valeur de \(0.8\) permet des grands glissements plus larges dans le sommet qu’une valeur de \(1.2\) , par exemple.
Pour des cas pratiques, on recommande d’utiliser une valeur comprise entre \(0.8\) et \(1.1\) pour reproduire une courbe de comportement cohérente (Voir Fig. 215).

Fig. 215 Comparaison de \({B}_{\text{2DT}}\) : endommagement et rupture de la liaison#
Les paramètres d’endommagement sur la direction normale#
La limite de déformation \({\varepsilon}_{N}^{1}\) ou seuil des grands déplacements#
De façon similaire au comportement élastique dans la direction tangentielle, on considère que la décohésion doit s’initier lors du dépassement d’un certain seuil de déformation. Nous proposons d’adopter une valeur entre \({10}^{-4}\) et \({10}^{-3}\) .
Le paramètre d’endommagement \({A}_{\mathit{DN}}\)#
Ce paramètre contrôle essentiellement la pente de dégradation de la contrainte normale par rapport à la déformation due à l’ouverture de l’interface. Nous proposons d’utiliser une valeur minimale de \(1\times {10}^{-1}{\mathit{MPa}}^{-1}\) , qui correspond à une dégradation similaire à celle du béton. Néanmoins, si on souhaite avoir un comportement de la liaison encore plus fragile, il suffit d’augmenter cette valeur.
Le paramètre d’endommagement \({B}_{\mathit{DN}}\)#
En combinaison avec le paramètre précédent, ce paramètre contrôle l’endommagement de la liaison, en particulier l’allure de la courbe de comportement en phase post-pic.
Nous proposons d’utiliser une valeur égale à \(1,\) ou \(1,2\) pour des courbes plus prononcées.

Fig. 216 Comportement de la liaison sur la direction normale lors de l’ouverture de l’interface (traction normale sur la liaison)#
Les paramètres du frottement#
Le paramètre matériau \(\gamma\) de frottement des fissures#
Un des atouts du modèle ici proposé est qu’il est capable de prendre en compte les effets du frottement des fissures, qui, dans le cas de chargement monotone, se manifeste par une contribution positive à la résistance au cisaillement de la liaison ; par ailleurs, dans les cas de chargements cycliques, il est évident que l’allure des boucles d’hystérésis dépend directement du choix de la valeur de ce paramètre matériau. Cependant, les valeurs correspondantes n’ont pas été calibrées, puisque nous n’avons pas encore simulé des tests avec des chargements cycliques pour les valider. Temporairement, on propose d’utiliser des valeurs inférieures à \(10\mathit{MPa}\) , avec une valeur maximale de \(\alpha\) égal à \(1.0{\mathit{MPa}}^{-1}\) .
Le paramètre matériau \(\alpha\) d’écrouissage cinématique#
Sur la [Fig. 217], on peut apprécier que la diminution de la valeur de \(\alpha\) augmente la dissipation hystérétique, mais aussi la résistance de cisaillement et la déformation pseudo-plastique résiduelle. Cela est très important pour la modélisation cyclique de la liaison puisque dans la réalité, lorsqu’on dépasse le pic de résistance maximale, on remarque qu’au moment de la décharge il n’y a plus de contribution élastique du glissement, c’est-à-dire que la déformation pseudo-plastique résiduelle correspond exactement au glissement total atteint. En d’autres mots, une fois reliées toutes les fissures dans la couche potentielle de rupture, longitudinale et tangentielle à la barre d’acier, l’unique résistance qui empêchera le déplacement de l’armature est la résistance au frottement de la liaison, produite par le contact et l’enchevêtrement des aspérités entre les surfaces béton – béton.
Comme précédemment, notre expérience est limité: on propose d’utiliser une valeur maximale de \(0.1{\mathit{MPa}}^{-1}\) qui donne des résultats corrects pour des applications en chargement monotone, et qui semble convenable pour des chargements cycliques.

Fig. 217 Comparaison de \(\alpha\) : effets sur les boucles de hystérésis en cyclique#
Le paramètre d’influence du confinement \(c\)#
Dans notre modèle, l’influence du confinement a été prise en compte grâce à l’application de ce paramètre qui contrôle ces effets sur la liaison, et qui se manifeste par un accroissement de la contrainte de cisaillement maximale ainsi que par l’augmentation du déplacement maximal au pic quand le confinement augmente.
Pour la calibration, nous avons réalisé des simulations avec des confinements de \(0\) , \(5\) , \(10\) et \(15\mathit{MPa}\) , en utilisant toujours une valeur de \(1.0\) pour ce paramètre. On a remarqué que si l’on veut produire une translation cinématique du glissement provoqué par le confinement, il suffit d‘adopter une valeur de \(1.2\) ou \(1.5\) (adimensionnelle). Facultativement, il est conseillé de maintenir la valeur de \(1.0\) pour des calculs ordinaires.
Résumé des paramètres#
Pour faciliter l’utilisation de la loi, le tableau suivant présente une synthèse de l’ensemble des paramètres du modèle de comportement.
On rappelle que les valeurs ou les expressions proposées n’ont qu’une valeur indicative, et que la combinaison arbitraire peut donner des résultats inexacts et inattendus par rapport au comportement espéré de la liaison; autrement dit, un mauvais choix des paramètres peut produire une forte rigidité ou bien une faible réponse de l’interface acier – béton.
Paramètre |
Unité |
Valeur proposée |
Expression analytique |
Variables concernées |
|
\({h}_{\mathrm{pen}}\) |
\(\mathit{mm}\) |
— |
\({h}_{\mathrm{pen}}={d}_{b}.{\alpha}_{\mathrm{sR}}\) |
\({d}_{b}\) |
Diamètre de la barre |
\({\alpha}_{\mathrm{sR}}\) |
Aire relative des nervures |
||||
\({G}_{\mathrm{liai}}\) |
\(\mathit{MPa}\) |
— |
\({G}_{\mathrm{liai}}={C}_{\mathrm{arm}}\cdot {G}_{\mathrm{beton}}\) |
\({C}_{\mathrm{arm}}\) |
Coefficient de correction par armatures |
\({G}_{\mathrm{beton}}\) |
Module de rigidité du béton |
||||
\({\varepsilon}_{T}^{1}\) |
— |
min 1.0x10-4 max 1.5x10-3 |
|||
\({A}_{\mathrm{1DT}}\) |
— |
min 1.0 max 5.0 |
\({A}_{\mathrm{1DT}}=\frac{1}{(1+{\alpha}_{\mathrm{SR}})}\cdot \sqrt{\frac{f'c}{30}}\cdot \sqrt{\frac{{E}_{a}}{{E}_{b}}}\) |
\(f’c\) |
Résistance à la compression du béton (MPa) |
E a |
Module d’élasticité de l’acier |
||||
E b |
Module d’élasticité du béton |
||||
\({B}_{\mathrm{1DT}}\) |
— |
min 0.1 max 0.5 |
|||
\({\varepsilon}_{T}^{2}\) |
— |
— |
\({\varepsilon}_{T}^{2}=\frac{1}{{({h}_{\mathrm{pen}})}^{2}}\cdot (1-\frac{{({A}_{\mathrm{1DT}})}^{4}}{9+{({A}_{\mathrm{1DT}})}^{4}})\le 1.0\) |
||
\({A}_{\mathrm{2DT}}\) |
MPa-1 |
min 1.0x10-4max 9.x10-2 |
|||
\({B}_{\mathrm{2DT}}\) |
— |
min 0.8 max 1.5 |
|||
\(\gamma\) |
MPa |
max 10.0 |
|||
\(a\) |
MPa-1 |
min 0.01 max 1.0 |
|||
\(c\) |
— |
1.0 |
(valeur recommandée) |
||
\(\alpha\) |
— |
min 10-4 max 0.9 10-3 |
|||
\({A}_{\mathrm{DN}}\) |
MPa-1 |
min 1.0x10-1 |
(valeur recommandée, non calibrée) |
||
\({B}_{\mathrm{DN}}\) |
— |
(valeur recommandée, non calibrée) |
|||
Bibliographie#
ARMSTRONG, P.J. & FREDERICK, C.O. : A Mathematical Representation of the Multiaxial Bauschinger Effect. G.E.G.B. ; Report RD/B/N, 731, 1966.
BERTERO V.V. : Seismic behavior of structural concrete linear elements (beams and columns) and their connections. Comité Euro-International du Béton (CEB) ; Bulletin d’information No. 131; Paris, France, 1979.
ELIGEHAUSEN R., POPOV E.P. & BERTERO V.V. : Local bond stress-slip relationships of deformed bars under generalised excitations. University of California; Report no. UCB/EERC‑83/23 of the National Science Foundation , 1983.
ORTIZ M. & SIMO J.C. : An analysis of a new class of integration algorithms for elastoplastic constitutive relations. International Journal for Numerical Methods in Engineering ; Vol. 23, pp.353 – 366, 1986.
Vérification#
La loi de comportement JOINT_BA est vérifiée par les cas tests suivants:
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
7.4 |
S. MICHEL-PONNELLE, N. DOMINGUEZ EDF-R&D/AMA |
Texte initial |