v2.01.024 SDLD24- Système de deux masses-ressorts indépendants sous sollicitation harmonique forcée#
Résumé
Ce cas test consiste à calculer la réponse transitoire amortie d’un système encastré-libre de deux masses-ressorts linéaires, soumis à une accélération imposée mono-appui.
Son objectif est de valider la méthodologie consistant à calculer les modes en bloquant l’une puis l’autre des deux masses. Une base modale unique est créé à partir de ces deux modes. Un calcul dynamique est ensuite réalisé en utilisant un amortissement modal déduit de ces modes.
Solution de référence#
La solution de référence est analytique, et obtenue comme suit.
On notera par la suite \(u={u}_{x}\) . L’équation dans le repère relatif du mouvement de \({P}_{2}\) s’écrit:
(2-1) \(m\ddot{u}+c\dot{u}+ku=-m\ddot{{u}_{e}}(t)\)
Le chargement est appliqué à l’aide de la commande AFFE_CHAR_SEISME. La fonction multiplicatrice FONC_MULT associée définit l’accélération d’entraînement, comme:
(2-2) \(\ddot{{u}_{e}}(t)={A}_{e}\sin({\omega}_{e}t)\)
Le problème à résoudre s’écrit donc:
(2-3) \(m\ddot{u}+c\dot{u}+ku=-m{A}_{e}\sin({\omega}_{e}t)\)
Soit, en définissant les quantités réduites \({\omega}_{0}^{2}=\frac{k}{m}\) et \(\xi =\frac{c}{2m{\omega}_{0}}\) :
(2-4) \(\ddot{u}+2{\omega}_{0}\xi \dot{u}+{\omega}_{0}^{2}u=-{A}_{e}\sin({\omega}_{e}t)\)
avec les conditions initiales:
(2-5) \(u(0)=0\)
(2-6) \(\dot{u}(0)=0\)
On cherche une solution particulière à () sous la forme:
(2-7) \(\stackrel{~}{u}(t)=D\sin({\omega}_{e}t+\varphi )\)
On pose:
(2-8) \(\stackrel{~}{U}(t)=D{e}^{i({\omega}_{e}t+\varphi )}\)
On a alors \(\stackrel{~}{u}(t)=\mathrm{\Im }(\stackrel{~}{U}(t))\) (partie imaginaire).
Soit l’équation différentielle complexe:
(2-9) \(\ddot{\stackrel{~}{U}}+2{\omega}_{0}\xi \dot{\stackrel{~}{U}}+{\omega}_{0}^{2}\stackrel{~}{U}=-{A}_{e}{e}^{i({\omega}_{e}t)}\)
Si \(\stackrel{~}{U}\) est solution de (), alors est solution de (). En injectant l’expression () dans (), on trouve:
(2-10) \((-{\omega}_{\mathit{ex}}^{2}+2i{\omega}_{0}{\omega}_{e}\xi +{\omega}_{0}^{2})B{e}^{i\varphi }=-{A}_{e}\)
d’où l’on peut déterminer les paramètres \(D\) et \(\varphi\) de l’expression ():
(2-11) \(D=\left|\frac{{A}_{e}}{{\omega}_{0}^{2}-{\omega}_{e}^{2}+2i{\omega}_{0}{\omega}_{e}\xi }\right|=\frac{{A}_{e}}{\sqrt{{\left({\omega}_{0}^{2}-{\omega}_{e}^{2}\right)}^{2}+{\left(2{\omega}_{0}{\omega}_{e}\xi \right)}^{2}}}\)
(2-12) \(\varphi =\mathit{arg}\left(-\frac{{A}_{e}}{{\omega}_{0}^{2}-{\omega}_{e}^{2}+2i{\omega}_{0}{\omega}_{e}\xi }\right)=\mathit{arg}\left({\omega}_{e}^{2}-{\omega}_{0}^{2}+2i{\omega}_{0}{\omega}_{e}\xi \right)=\mathit{atan}2\left(\frac{2{\omega}_{0}{\omega}_{e}\xi }{{\omega}_{e}^{2}-{\omega}_{0}^{2}}\right)\)
La solution générale du problème s’écrit alors classiquement comme la somme de la solution particulière et de la solution homogène d’une équation différentielle d’ordre 2 à coefficients constants (voir par exemple [ 1 ]:
(2-13) \(u(t)={e}^{-\xi {\omega}_{0}t}\left(A\cos({\omega}_{\xi}t)+B\sin({\omega}_{\xi}t)\right)+D\sin({\omega}_{e}t)\)
avec:
(2-14) \({\omega}_{\xi}={\omega}_{0}\sqrt{1-{\xi}^{2}}\)
Les conditions initiales () et () donnent respectivement:
\(A+D\sin(\varphi )=0\)
\({\omega}_{0}\left(-\xi A+B\sqrt{1-{\xi}^{2}}\right)+{\omega}_{e}D\cos(\varphi )=0\)
D’où l’on peut déduire:
(2-15) \(A=-D\sin(\varphi )\)
(2-16) \(B=-\frac{{\omega}_{e}D\cos\varphi }{{\omega}_{0}\sqrt{1-{\xi}^{2}}}+\frac{\xi D\sin(\varphi )}{\sqrt{1-{\xi}^{2}}}=-\frac{D}{\sqrt{1-{\xi}^{2}}}\left(\frac{{\omega}_{e}}{{\omega}_{0}}\cos(\varphi )+\xi \sin(\varphi )\right)\)
La solution analytique s’écrit donc comme () où \(A\) , \(B\) , \(D\) , \({\omega}_{\xi}\) et \(\varphi\) sont donnés respectivement par (), (), (), () et ().
Résultats de référence#
Pour ce cas test, on choisit une pulsation d’excitation du signal harmonique \({\omega}_{e}=2{s}^{-1}\) , \(\xi =0,05\) et \({A}_{e}=1m.{s}^{-2}\) . Compte-tenu des paramètres du problèmes, la fréquence propre est \({\omega}_{0}=1{s}^{-1}\) .
On teste les valeurs du déplacement relatif \({u}_{x}\) aux points \({P}_{2}\) et \({P}_{3}\) à \(t=10s\) :
Déplacement à \(t=10s\) |
|
Nœud |
\(\mathit{DX}\) |
\(N2\) (point \({P}_{2}\) ) |
0.538736 |
\(N3\) (point \({P}_{3}\) ) |
0.538736 |
Incertitude sur la solution#
Précision sur l’intégration en temps dans DYNA_NON_LINE
Modélisation A#
Caractéristiques de la modélisation#
Les ressorts et masses ponctuelles sont modélisés par des éléments discrets à 3 degrés de liberté DIS_T. Les nœuds \(N2\) et \(N3\) sont légèrement décalés selon \(Y\) , respectivement \(Y=0,01m\) et \(Y=-0,01m\) , ce qui ne modifie pas les résultats étant donné que seul le problème selon \(X\) est résolu.
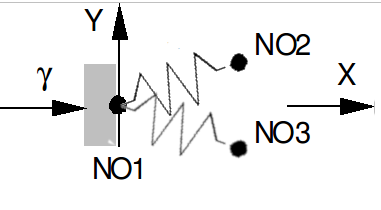
Le nœud \(N1\) est encastré et soumis à une accélération imposée \(\gamma (t)\) .
Le mode du premier système masse ressort est d’abord calculé en imposant \({u}_{x}({P}_{3})=0\) . Puis le mode du second, en imposant \({u}_{x}({P}_{2})=0\) . Une base modale unique est créé à partir de ces deux modes, à l’aide de la commande DEFI_BASE_MODALE avec l’option NUME_REF. Un calcul dynamique est ensuite réalisé avec la commande DYNA_NON_LINE en utilisant un amortissement modal déduit de ces modes.
Caractéristiques du maillage#
Nombre de nœuds : 3
Nombre de mailles et types : 2DIS_T
Grandeurs testées et résultats#
Les solutions testées sont le déplacement relatif en \(t=10s\) :
Nœud |
Référence |
Tolérance |
\(N2\) (point \({P}_{2}\) ) |
0.538736 |
1% |
\(N3\) (point \({P}_{3}\) ) |
0.538736 |
1% |
Synthèse des résultats#
Les résultats sont en accord avec la solution analytique, ce qui valide:
l’implémentation du schéma en temps de NEWMARK dans DYNA_NON_LINE
la méthodologie consistant à calculer les modes en bloquant l’un puis l’autre de deux sous-systèmes, puis à créer une base modale unique utilisée pour définir un amortissement modal.