r5.05.08 Modélisation des rotors fissurés par raideur équivalente fonction de l’angle de rotation#
Résumé:
Ce document décrit une méthode de prise en compte des fissures dans les rotors modélisés en 1D.
Elle se base sur des développements théoriques décrits dans les notes [1] et [2] et publiés dans [3], établissant, sous certaines hypothèses, l’équivalence entre un modèle 3D non linéaire avec calcul du contact et un modèle de poutre où la non linéarité due à la fissure est simulée par une raideur équivalente concentrée entre deux éléments de poutre et fonction tabulée non linéaire de l’angle du moment de flexion par rapport à la fissure. Cette méthode utilisée, dans le code de calcul de lignes d’arbres CADYRO, a été étendue et validée par rapport à l’expérience sur le banc d’essai EUROPE [4]. Elle est reprise dans l’opérateur DYNA_VIBRA de Code_Aster .
Bibliographie Historique_des_versions_du_document
Hypothèses#
Les hypothèses utilisées pour construire le modèle 1D de fissure sont :
le rotor a un comportement élastique isotrope ;
la fissure peut être de forme quelconque mais elle contenue dans une section de poutre ;
les lèvres de la fissure sont reliées par une condition de contact sans frottement ;
les efforts normaux et tranchants sont négligés (sous certaines hypothèses on peut prendre en compte les efforts de torsion mais dans le cadre de cet élément ils sont oubliés) ;
le jeu initial de la fissure est nul ;
le comportement de la fissure est quasi-statique et les effets d’inertie sont négligeables.
Repères et notations#
Par défaut le repère local des poutres dans Code_Aster est l’axe \(X\) . On conserve cette convention.
L’élément de rotor fissuré est caractérisé par :
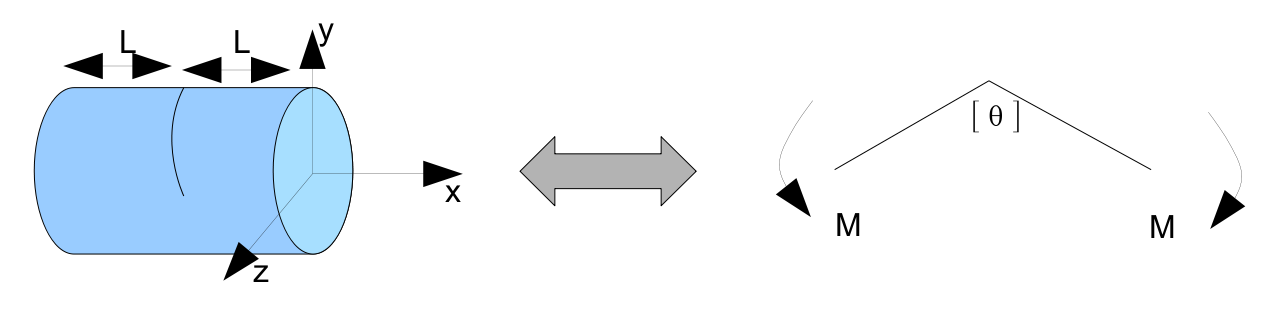
sa longueur \(\mathrm{2L}\) ;
son rayon \(R\) ;
la position de la section fissurée (au milieu du rotor)
On considère les caractéristiques mécaniques suivantes :
module d’Young : \(E\)
Inertie de la poutre non fissurée : \(I\)
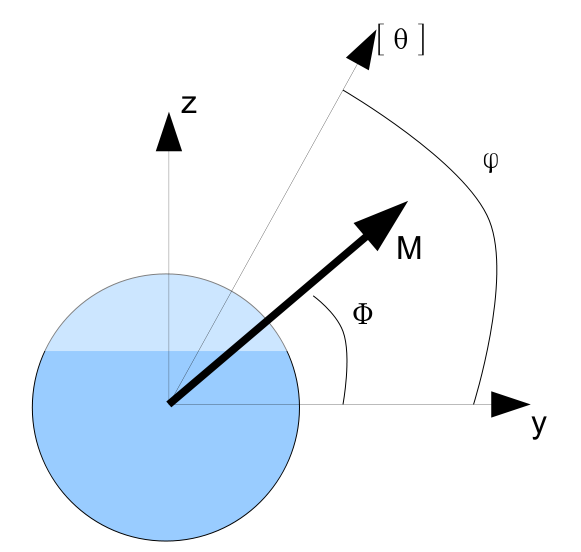
On suit la description classique de la cinématique des poutres. Les sections perpendiculaires de la poutre restent droites et leur rotation est décrite par :
\(\theta =\left(\begin{array}{c}{\theta}_{y}(x)\\ {\theta}_{z}(x)\end{array}\right)\)
La poutre est soumise à un moment de flexion :
\(M=(\begin{array}{c}{M}_{y}\\ {M}_{z}\end{array})\) , qui peut ouvrir ou fermer la fissure.
L’énergie de déformation de la partie de rotor fissurée sous le chargement de flexion imposé est notée \({W}^{f}(M)\) .
L’énergie de déformation apportée par l’élément discret modélisant la fissure pour une discontinuité de rotation \([\theta ]\) est noté \({W}^{d}([\theta ])\) .
La description de la section fissurée, quoique moyennée dans la modélisation de poutre, nécessite toutefois une certaine attention, car l’orientation de la réponse au niveau de la fissure n’est pas systématiquement la même que celle de l’effort. Elle dépend de la forme de la fissure.
Deux angles sont donc définis dans le repère de la section fissurée :
\(\Phi\) , l’orientation de l’effort imposé dans le repère tournant ;
\(\varphi\) , l’orientation de la réponse dans le repère tournant.
Enfin, on note \(s(M)\) la souplesse locale de l’élément équivalent 1D représentant la fissure et \(k([\theta ])\) sa raideur locale.
Détermination de la raideur équivalente de la fissure#
Modèle équivalent de fissure#
On cherche dans ce chapitre à déterminer la loi de comportement \(M=f([\theta ])\) reliant pour l’élément de fissure 1D les efforts de flexion \(M\) aux déformations exprimées par le saut de rotation \([\theta ]=\left(\begin{array}{c}[{\theta}_{y}(x)]\\ [{\theta}_{z}(x)]\end{array}\right)\) des lèvres de la fissure représentées par les deux nœuds frontières de la fissure.
Énergie de déformation#
Formule de l’énergie de déformation à effort imposé#
Dans [1] on établit que l’énergie du modèle 3D en quasi-statique est donnée par une formule de «Clapeyron» :
\({W}^{f}({M}_{y},{M}_{z})=\frac{1}{2}\left({M}_{y}{\theta}_{y}(\mathrm{2L})+{M}_{z}{\theta}_{z}(\mathrm{2L})\right)\)
Sur le modèle élément fini 3D, on peut grâce à cette formule calculer l’énergie du système pour tout les couples possibles \(({M}_{y},{M}_{z})\) et déterminer la raideur équivalente \(k({M}_{y},{M}_{z})\) pour l’élément 1D de poutre fissuré.
Cependant explorer un espace équivalent à \({ℝ}^{2}\) serait trop coûteux pour une application pratique. Les propriétés de la fonctionnelle d’énergie du problème élastique avec contact permettent de réduire le problème à une seule variable.
On montre que \({W}^{f}\) est convexe et positivement homogène de degré 2 par rapport aux moments appliqués:
\(\forall \lambda \ge 0,{W}^{f}(\lambda {M}_{y},\lambda {M}_{z})={\lambda}^{2}{W}^{f}({M}_{y},{M}_{z})\)
Cette propriété est intéressante car elle veut dire, en pratique, que la zone de contact sur les lèvres de la fissure est indépendante de l’amplitude \(M\) de la flexion. L’énergie est quadratique en \(M\) , comme dans le cas linéaire. Sa forme ne dépend que de la direction de \(({M}_{y},{M}_{z})\) . On peut donc réécrire la fonction d’énergie avec, pour variables, l’amplitude de l’effort de flexion \(\mid \mid M\mid \mid\) et son angle \(\phi\) .
Dans le repère cylindrique le moment s’écrit :
\(\begin{array}{c}{M}_{y}=\mid \mid M\mid \mid \cos\varphi \\ {M}_{z}=\mid \mid M\mid \mid \sin\varphi \end{array}\) et l’énergie de déformation : \({W}_{f}(M)=\frac{1}{2}{\mid \mid M\mid \mid }^{2}S(\varphi )\)
Le problème se réduit à l’identification de \(S(\phi )\) sur l’intervalle \([0,2\pi ]\) .
L’énergie est réécrite sous une forme qui distingue la souplesse \(S(\varphi )\) , apportée par les poutres (parties saine et fissurée) et la souplesse \(s(\phi )\) , apportée par la fissure :
\({W}^{f}(M)=\frac{L}{\mathit{EI}}{\mid \mid M\mid \mid }^{2}(1+s(\varphi ))\)
En calculant l’énergie de déformation sur un modèle éléments finis 3D du barreau fissuré (figure ), on peut déterminer \(s(\varphi )\) .
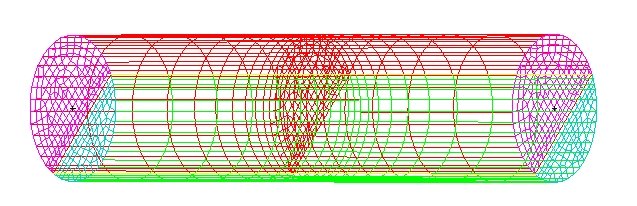
Illustration 1: Maillage 3D du barreau fissuré
Énergie à déplacement imposé#
Il reste maintenant à établir la relation entre l’énergie et \([\theta ]\) . On utilise pour cela l’énergie à déplacement imposé \({w}^{d}\) . Elle possède les mêmes propriétés de convexité et d’homogénéité de degré 2 que l’énergie à effort imposé.
En posant :
\(\begin{array}{c}[{\theta}_{x}]=\mid \mid [\theta ]\mid \mid \cos(\phi )\\ [{\theta}_{y}]=\mid \mid [\theta ]\mid \mid \sin(\phi )\end{array}\)
on obtient l’expression suivante pour l’énergie de déformation :
\({w}^{d}([\theta ])=\frac{\mathit{EI}}{\mathrm{4L}}{\mid \mid [\theta ]\mid \mid }^{2}k(\phi )\)
loi de comportement de l’élément fissuré#
On obtient \(M\) en fonction de \([\theta ]\) par dérivation de l’énergie :
\(\begin{array}{c}{M}_{y}=\frac{\mathit{EI}}{\mathrm{4L}}\frac{\partial (k(\varphi )({[{\theta}_{y}]}^{2}+{[{\theta}_{z}]}^{2}))}{\partial {[\theta ]}_{y}}\\ {M}_{z}=\frac{\mathit{EI}}{\mathrm{4L}}\frac{\partial (k(\varphi )({[{\theta}_{y}]}^{2}+{[{\theta}_{z}]}^{2}))}{\partial {[\theta ]}_{z}}\end{array}\) avec \([\theta ]=\sqrt{{[{\theta}_{y}]}^{2}+{[{\theta}_{z}]}^{2}}(\begin{array}{c}\cos(\varphi )\\ \sin(\varphi )\end{array})\)
Quelques calculs intermédiaires mènent aux relations suivantes :
\(\left(\begin{array}{c}{M}_{y}\\ {M}_{z}\end{array}\right)=\frac{\mathit{EI}}{\mathrm{2L}}\left(\begin{array}{c}k(\phi )-\frac{1}{2}k'(\phi )\\ \frac{1}{2}k'(\phi )k(\phi )\end{array}\right)\left(\begin{array}{c}[{\theta}_{y}(x)]\\ [{\theta}_{z}(x)]\end{array}\right)\) où \(\varphi =\arctan(\frac{[{\theta}_{z}(x)]}{[{\theta}_{y}(x)]})\)
Relation entre la rigidité de la fissure et son angle d’ouverture#
La direction \(\phi\) de l’angle moyen d’ouverture de la fissure \([\theta ]\) n’est a priori pas la même que \(\phi\) , celle des efforts des moments \(M\) .
Il s’agit donc maintenant d’établir une relation directe entre la rigidité (ou son inverse, la souplesse) et l’ouverture de la fissure. Elle est établie dans [1] et [2].
Par exploitation du principe de l’énergie complémentaire et grâce à la convexité de l’énergie de déformation , on montre que :
\({w}^{d}([\theta ])=\underset{M}{\mathit{Sup}}(\mathit{M.}[\theta ]-\frac{L}{\mathit{EI}}{\mid \mid M\mid \mid }^{2}s(\phi ))\)
La fonction \(s(\phi )\) a été établie dans les paragraphes précédents. Un traitement mathématique complémentaire consiste à appliquer à \(s(\phi )\) une interpolation quadratique en dehors de l’intervalle de nullité de \(s(\phi )\) et une interpolation puissance aux bornes de nullité de \(s(\phi )\) .
Par ailleurs, de la même façon que l’énergie à moment imposé, l’énergie à déformation imposée est convexe et homogène d’ordre 2. Cela implique qu’elle ne dépend pas de la norme de \([\theta ]\) , mais uniquement de sa direction \(\varphi\) . On peut donc se limiter à identifier \({w}^{d}([\theta ])\) pour \(\mid \mid [\theta ]\mid \mid =1\) .
L’énergie s’écrit alors :
\({w}^{d}([\theta ])=\frac{\mathit{EI}}{\mathrm{4L}}k(\varphi )\) .
Si \(\lambda\) est l’amplitude du moment appliqué et \(\phi\) sa direction, par identification on trouve la formule donnant la raideur équivalente de fissure :
\(k(\varphi )=\frac{\mathrm{4L}}{\mathit{EI}}\underset{M=1}{\mathit{Sup}}\underset{\lambda \ge 0}{\mathit{Sup}}(\lambda \mathit{M.}[\theta ]-\frac{L}{\mathit{EI}}{\lambda}^{2}s(\phi ))\)
En pratique cela revient à trouver le domaine \([{\varphi}_{1,}{\varphi}_{2}]\) que peut avoir la direction de la fissure puis à maximiser pour tous les angles de fissure \(\varphi\) possibles l’expression suivante :
\(k(\varphi )=\underset{\phi \in [\varphi -\frac{\pi}{2,}\varphi +\frac{\pi}{2}]}{\mathit{Sup}}\frac{{\cos}^{2}(\phi -\varphi )}{s(\phi )}\)
La dérivée \(k'(\varphi )=\frac{dk(\varphi )}{d\varphi }\) est alors obtenue à l’aide d’une dérivation par Différences Finies de \(k(\varphi )\) .