v2.01.105 SDLD105 - Réponse transitoire d’un système masses-ressorts à un séisme mono-appui avec correction statique#
Résumé
Ce cas test, inspiré du cas test VPCS SDLD04, consiste à calculer la réponse transitoire non amortie d’un système masses-ressorts linéaire encastré-libre, soumis à une accélération imposée mono-appui.
Son objectif est de montrer l’intérêt de la correction statique, qu’elle soit réalisée a priori par adjonction de modes statiques à la base des modes dynamiques, ou a posteriori .
Solution de référence#
L’objectif du cas test est de montrer l’effet de troncature modale sur un exemple très simple de calcul sismique et d’illustrer l’intérêt de la correction statique, qu’elle soit réalisée a priori par adjonction de modes statiques à la base des modes dynamiques, ou a posteriori . La solution de référence est le calcul transitoire sur base modale complète réalisé avec l’opérateur DYNA_VIBRA.
Le système masses-ressorts possède trois degrés de liberté. Il est donc associé à trois modes dont les fréquences calculées sont :
\({f}_{1}=0,946\mathrm{Hz}\) , \({f}_{2}=2,533\mathrm{Hz}\) et \({f}_{3}=5,305\mathrm{Hz}\) .
La fréquence d’excitation du signal sismique harmonique a été choisie à \({f}_{\mathrm{ex}}=2\mathrm{Hz}\) pour ne garder dans la base modale que les deux premiers modes. On respecte la règle de retenir les modes jusqu’à deux fois la fréquence maximale d’excitation.
Le tableau des masses modales effectives unitaires donne des informations intéressantes:
Masse effective unitaire |
|||
NUME_MODE |
FREQUENCE |
MASS_EFFE_UN_DX |
CUMUL_DX |
1 |
9.48538E-01 |
6.82972E-01 |
6.82972E-01 |
2 |
2.53344E+00 |
5.03369E-02 |
7.33309E-01 |
3 |
5.30513E+00 |
2.66691E-01 |
1.00000E+00 |
On observe que le troisième mode aura une réponse dynamique négligeable car sa fréquence propre vaut \({f}_{3}=5,305\mathit{Hz}\) , au-delà de \(2\times {f}_{\mathit{ex}}=4,0\mathit{Hz}\) . En revanche sa masse modale effective unitaire dans la direction \(x\) vaut \(\text{26,7 \%}\) . Elle n’est donc pas négligeable et ce mode peut avoir de l’influence sur la réponse du système masses-ressorts par sa contribution quasi-statique. C’est le but de la correction statique que de la prendre en compte.
Si on regarde maintenant la géométrie du mode 3, on constate que c’est principalement sur le nœud \(\mathrm{N02}\) que l’on va pouvoir observer l’effet du mode et donc l’effet de la correction statique.
Mode 1 |
Mode 2 |
Mode 3 |
|
Nœud |
\(\mathrm{DX}\) |
\(\mathrm{DX}\) |
\(\mathrm{DX}\) |
\(\mathrm{N01}\) (point \(A\) ) |
0.00000E+00 |
0.00000E+00 |
0.00000E+00 |
\(\mathrm{N02}\) (point \(B\) ) |
5.08430E-02 |
9.84653E-02 |
9.93841E-01 |
\(\mathrm{N03}\) (point \(C\) ) |
5.41213E-01 |
8.33623E-01 |
-1.10279E-01 |
\(\mathrm{N04}\) (point \(D\) ) |
8.39347E-01 |
-5.43487E-01 |
1.09069E-02 |
En effet, à la lecture du tableau des composantes modales, il apparaît que la composante du mode 3 sur tous les nœuds est minoritaire par rapport aux autres modes, sauf pour le nœud \(\mathrm{N02}\) .
Résultats de référence#
On prend pour résultats de référence les résultats donnés par DYNA_VIBRA avec la base modale complète aux nœuds \(\mathrm{N02}\) et \(\mathrm{N04}\) à l’instant \(t=19,4s\) .
Incertitude sur la solution#
Précision sur l’intégration en temps dans DYNA_VIBRA
Modélisation A#
Caractéristiques de la modélisation#
Les ressorts et masses ponctuelles sont modélisés par des éléments discrets à 3 degrés de liberté DIS_T:
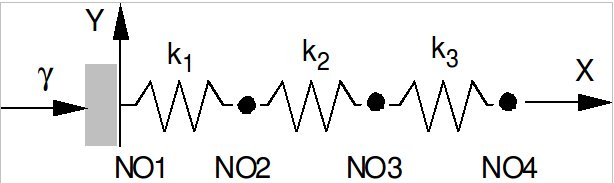
Le nœud \(\mathrm{NO1}\) est encastré et soumis à une accélération imposée \(\gamma (t)\) .
Caractéristiques du maillage#
Nombre de nœuds : 4
Nombre de mailles et types : 3 DIS_T
Grandeurs testées et résultats#
Fréquences propres (en \(\mathrm{Hz}\) ) du système:
Numéro du mode |
Code_Aster |
1 |
0,94853 |
2 |
2,53344 |
3 |
5,30513 |
Calcul transitoire par synthèse modale
On teste la prise en compte d’un chargement sous forme de vecteur projeté sur la base modale, sous forme de composante modale, sous forme de vecteur projeté et de composante modale simultanément, ainsi que la prise en compte des modes négligés par la correction statique.
La correction statique est prise en compte selon les différentes possibilités suivantes:
correction statique a posteriori ;
correction statique a priori , en complétant la base des modes dynamiques par les modes statiques à force imposée, avec ré-orthogonalisation de la baseainsi complétée ;
correction statique a priori , en complétant la base des modes dynamiques par les modes statiques à accélération imposée (pseudo-mode), avec ré-orthogonalisation de la base ainsi complétée;
correction statique a priori , en complétant la base des modes dynamiques par les modes statiques à force imposée et les modes statiques à accélération imposée (pseudo-mode), avec ré-orthogonalisation de la base ainsi complétée.
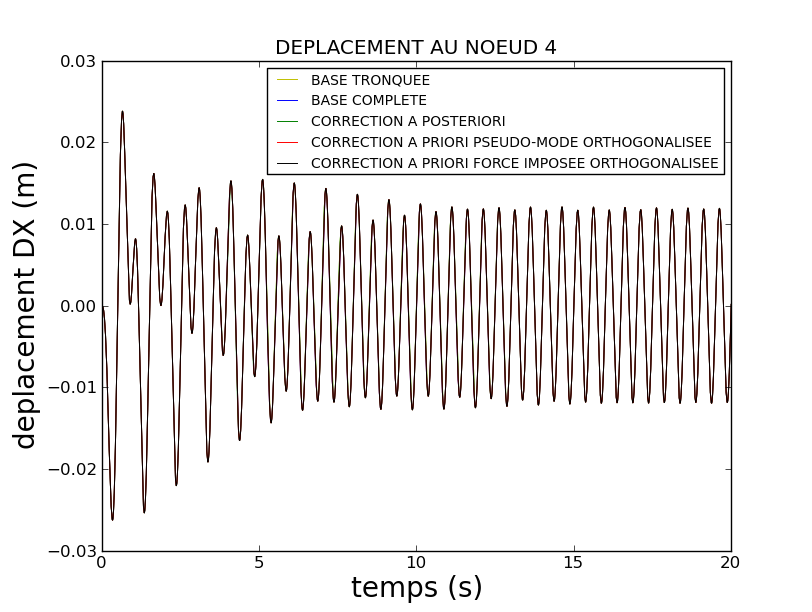
Valeurs du déplacement relatif du nœud \(\mathit{NO}4\) à l’instant \(t=19,4s\) (m) :
base modale |
Référence |
Tolérance |
base tronquée |
-0.011301 |
0.1% |
base complète |
-0.011301 |
1.e-04% |
correction statique a posteriori |
-0.011301 |
0.1% |
correction statique a priori , pseudo-mode, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
correction statique a priori , modes statiques à force imposée, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
correction statique a priori , pseudo-mode, modes statiques à force imposée, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
Valeurs du déplacement relatif du nœud \(\mathit{NO}2\) à l’instant \(t=19,4s\) (m) :
base modale |
Référence |
Tolérance |
base tronquée |
7.33162E-04 |
123.0% |
base complète |
7.33162E-04 |
1.0E-04% |
correction statique a posteriori |
7.33162E-04 |
19.5% |
correction statique a priori , pseudo-mode, avec ré-orthogonalisation |
7.33162E-04 |
1.0E-04% |
correction statique a priori , modes statiques à force imposée, avec ré-orthogonalisation |
7.33162E-04 |
1.0E-04% |
correction statique a priori , pseudo-mode, modes statiques à force imposée, avec ré-orthogonalisation |
7.33162E-04 |
1.e-04% |
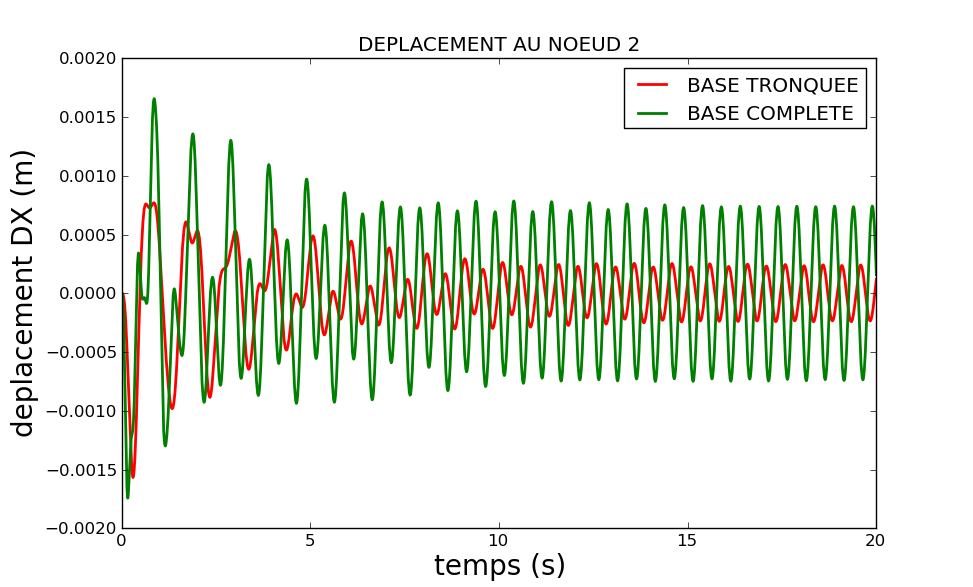
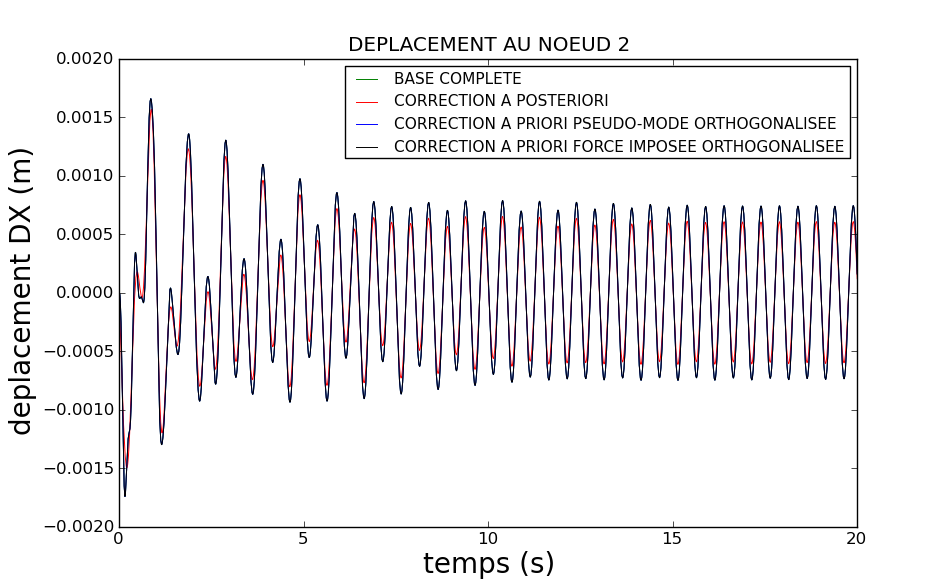
On a illustré ci‑dessus l’intérêt de la correction statique : comme prévu à la lecture des déformées modales, la correction statique n’est pas visible pour le \(\mathit{NO4}\) mais joue un rôle important pour le \(\mathrm{NO2}\) . Sans correction statique au \(\mathit{NO}2\) , le déplacement est déphasé et son amplitude minorée de \(\text{50\%}\) . Au \(\mathit{NO}2\) , avec correction statique a posteriori , l’erreur reste visible (inférieure à \(\text{20\%}\) ), mais le calcul reste réaliste; avec correction statique a priori , quelle que soit la nature des modes statiques considérés (à accélération ou à force imposée), l’erreur de troncature modale est complètement compensée, permettant de retrouver exactement le déplacement de référence. Sur un calcul moins caricatural, l’erreur sera moins sensible. On remarque aussi que l’amplitude du déplacement au nœud \(\mathrm{NO2}\) est de deux ordres plus petite que celle au nœud \(\mathrm{NO4}\) .
Modélisation B#
Caractéristiques de la modélisation#
La modélisation par éléments discrets est la même qu’au § 3.1 . La seule différence réside dans la manière de spécifier le second mode pour toutes les analyses sur base modale tronquée: le second mode est spécifié explicitement en imposant aux nœuds \(\mathit{NO2}\) , \(\mathit{NO}3\) et \(\mathit{NO}4\) un déplacement \(\mathit{DX}\) correspondant à la déformée modale de référence du § 2 . Ceci est représentatif de situations où certains modes sont issus de reconstitution expérimentale et spécifiés par des déplacements imposés.
Caractéristiques du maillage#
Identique au § 3.2 .
Grandeurs testées et résultats#
Les grandeurs testées, valeurs de référence et tolérance sont les mêmes qu’au § 3.3 . Ceci permet de s’assurer que les différentes méthodes de correction statique fonctionnent de la même façon avec (i) une base modale entièrement calculée ou (ii) une base modale dont certains modes ont été donnés par déplacements imposés.
Les résultats obtenus sont résumés dans le tableau ci-après:
Valeurs du déplacement relatif du nœud \(\mathrm{NO4}\) à l’instant \(t=19,4s\) (m) :
base modale |
Référence |
Tolérance |
base tronquée |
-0.011301 |
0.1% |
base complète |
-0.011301 |
1.e-04% |
correction statique a posteriori |
-0.011301 |
0.1% |
correction statique a priori , pseudo-mode, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
correction statique a priori , modes statiques à force imposée, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
correction statique a priori , pseudo-mode, modes statiques à force imposée, avec ré-orthogonalisation |
-0.011301 |
1.e-04% |
Valeurs du déplacement relatif du nœud \(\mathrm{NO2}\) à l’instant \(t=19,4s\) (m) :
base modale |
Référence |
Tolérance |
base tronquée |
7.33162E-04 |
123.0% |
base complète |
7.33162E-04 |
1.0E-04% |
correction statique a posteriori |
7.33162E-04 |
19.5% |
correction statique a priori , pseudo-mode, avec ré-orthogonalisation |
7.33162E-04 |
1.0E-04% |
correction statique a priori , modes statiques à force imposée, avec ré-orthogonalisation |
7.33162E-04 |
1.0E-04% |
correction statique a priori , pseudo-mode, modes statiques à force imposée, avec ré-orthogonalisation |
7.33162E-04 |
1.e-04% |
Synthèse des résultats#
Le cas-test est un exemple de mise en œuvre de la correction statique, qu’elle soit réalisée a priori par adjonction de modes statiques à la base des modes dynamiques, ou a posteriori . Sur un système spécialement calculé pour montrer ses effets, il montre que la correction statique peut réduire de façon importante l’erreur due à l’effet de troncature modale sur les «hautes fréquences» (correction statique a posteriori), voire l’annuler complètement (correction statique a priori ), à condition de ré-orthogonaliser la base de Ritz ainsi obtenue. Sur une étude industrielle, on peut s’attendre à un effet moins visible.