r7.01.45 Loi de comportement RGI_BETON_BA#
Résumé:
Le modèle présenté dans ce document est un enrichissement d’un modèle déjà effectif dans Code_Aster: RGI_BETON (cf. R7.01.30). Il permet de considérer des armatures réparties au sein d’un massif de béton sans différencier leur maillage. Les comportements des deux matériaux sont évalués et homogénéisés afin d’en déduire la réponse du matériau béton armé.
Table des matières
Loi de comportement RGI_BETON_BA#
Loi de comportement du béton armé homogénéisé#
Cette loi permet donc de considérer le béton armé comme un unique matériau et ainsi, d’éviter la différenciation des maillages du béton de celui des armatures. L’évaluation de son comportement est obtenue par combinaison de la contribution de l’armature et du béton par une loi de comportement homogénéisée. Dans le modèle présenté ici, issu des travaux de [Sellier2018], jusqu’à cinq densités d’armatures peuvent être considérées. Celles-ci sont définies selon un indice r , auquel est associé une direction \(\vec{{V}^{r}}\), une densité surfacique \({\rho}^{r}\), et d’autres paramètres matériau.
Le matériau étant alors défini comme du béton armé, les paramètres renseignés dans ELAS permettant d’approcher la solution correspondent donc à ceux propres au béton armé. La réponse de ce matériau étant obtenue à partir des contributions du béton et de l’acier évaluées de façon indépendante, il s’agit donc de renseigner au modèle les paramètres propres au béton seul. En considérant \({E}^{\mathit{be}}\) le module du béton seul et \({E}^{r}\) le module de l’armature, celui-ci peut être évalué par la formule suivante,
Le modèle comportemental de béton auquel est associé ce développement prenant en compte l’endommagement, il s’agit donc de considérer l’impact de ces armatures en zones saines et en zones endommagées.
Ces zones pouvant coexister au sein d’un même élément, il en est de même pour la réponse de l’armature. Afin d’assurer cette différenciation, la contribution de l’armature est décomposée selon la zone saine ou endommagée considérée, respectivement \({\sigma}_{ij}^{H}\) et \({\sigma}_{ij}^{R}\) et sont pondérées de façon à considérer l’endommagement local du béton. Ainsi, en zone fissurée la contrainte \({\sigma}_{ij}^{R}\) est multipliée par l’endommagement local du béton dans la direction principale \({D}_{i}^{t}\) , et en zone saine la contrainte \({\sigma}_{ij}^{H}\) est multipliée par son complément à 1. Enfin, le comportement global du béton armé est obtenu en homogénéisant ces contraintes avec celle de la matrice de béton \({\sigma}_{ij}^{m}\) tel que,
Contribution en zone saine#
Dans ce modèle [Sellier2018], la participation de l’armature est limitée à celle de sa direction axiale. Ses contributions \({\sigma}_{i}^{H}\) et \({\sigma}_{i}^{R}\) respectivement en zone saine et en zone fissurée sont évaluées à partir de cette contrainte \({\sigma}^{r}\) . En zone saine, \({\sigma}_{i}^{H}\) est telle que,
Contributions en zone endommagée#
En zone fissurée, l’orientation de l’armature peut évoluer si la normale à la fissure ne lui est pas alignée. C’est l’effet Dowell, dit aussi effet Goujon. Dans le modèle, et au sein de la fissure, seule la part de l’armature est considérée. En plus de l’évolution de sa direction, il s’agit donc aussi de prendre en compte l’impact de l’endommagement sur sa contribution.
En premier lieu, la nouvelle direction de l’armature \({\vec{D}}^{r}\) est évaluée. Traversant une fissure du béton, celle-ci est donc comprise entre sa direction initiale \(\vec{{V}^{r}}\) et entre la direction principale de la fissure \({\vec{V}}^{I}\) . Il est à noter que cette présente notice détaillant uniquement le développement relatif aux armatures homogénéisées, le détail du calcul de \({\vec{V}}^{I}\) n’est pas présenté ici, et peut être trouvé dans la notice du modèle initial ([r7.01.36])
La nouvelle direction peut alors s’écrire tel que,
Avec:
\({\vec{g}}_{I}^{r}\) le déplacement entre l’ouverture de fissure \({w}_{I}^{\mathit{pl},t}\) et sa projection sur la direction initiale de l’armature \(\vec{{V}^{r}}\) tel que,
\({\alpha}^{r}\) l’angle séparant la direction d’armature initiale \(\vec{{V}^{r}}\) de sa nouvelle \({\vec{D}}^{r}\),
\({R}^{r}\) le rayon de courbure obtenu tel que,
Si plusieurs armatures traversent la même fissure, l’ensemble de leurs contributions est considéré. Celles-ci sont pondérées par l’endommagement local correspondant, puis sommées et ramenées en base locale grâce à la matrice de passage \(P\). L’évaluation de ces contributions s’initie par la définition d’une première matrice de calcul \(R\), et sont par suite déduites de sa partie symétrique tel que,
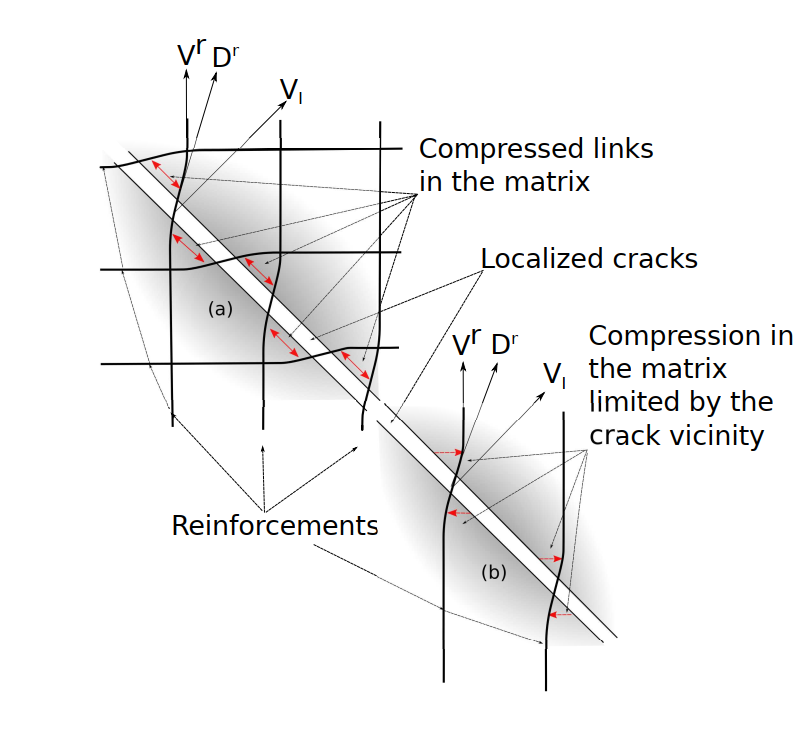
Fig. 276 Mécanismes assurant l’effet Dowel (a) ; Cas d’un effet plus limité (b) [Sellier2018]#
Il est à noter que cet effet est permis par les zones de confinement développées entre les armatures et le béton comme sur la Fig. 276 (a). Si le nombre d’armatures est plus limité, Fig. 276 (b), l’impact de cet effet Dowel en est fortement réduit [Sellier2018].
Enfin, il est à noter que dans le cas d’éléments de taille importante la représentation de la fissuration n’est pas souvent explicite. Il est néanmoins possible pour ces éléments armés, et en considérant une longueur d’ancrage de l’acier et la distance maximale entre deux fissures, d’obtenir le nombre de fissures localisées.
Loi de comportement de la contribution axiale de l’armature#
La contribution de l’armature est considérée dans sa direction axiale uniquement. La loi comportementale qui la définie permet la prise en compte de la plasticité et de la relaxation. La déformation de l’armature est décomposée selon sa part plastique \({\epsilon}^{r,\mathit{pl}}\) , et ses parts de relaxations élastique et permanente, \({\epsilon}^{r,K}\) et \({\epsilon}^{r,M}\) .
De plus, il est aussi possible de considérer des densités d’armatures actives en considérant une valeur de précontrainte initiale \({\sigma}_{0}^{r}\) tel que,
La déformation plastique est évaluée par une fonction critère permettant de prendre en compte l’écrouissage de l’armature. En considérant le module d’écrouissage et la limite d’élasticité, respectivement \({H}^{r}\) et \({f}_{y}^{r}\) , la fonction critère s’écrit,
Relaxation#
Comme vu sur l’équation (4999), le modèle permet de considérer une précontrainte. Le présent modèle ayant des finalités de calcul structural, les phénomènes de relaxation doivent donc être considérés. Ceux-ci étant fortement impactés par la valeur de tension initiale ainsi que par la température [Ajimi2017], un modèle de relaxation considérant ces impacts a été implémenté par [Chhun2018] [Chhun2017]. De la même façon que le modèle de fluage implémenté pour le béton [CF notice aster RGI_BETON], celui-ci est assuré par différents coefficients impactant les caractéristiques instantanées des armatures considérées. Le modèle est composé d’une première partie élastique assurant le comportant instantané, suivie d’un étage de Kelvin assurant la part des déformations visco-élastiques, et d’un troisième niveau dirigeant la part de déformation permanente, assurée par un module de Maxwell Fig. 277.
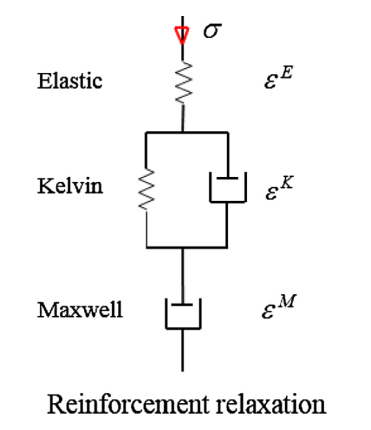
Fig. 277 Schéma rhéologique idéalisé du modèle de relaxation issu de [Chhun2017].#
Étage de Maxwell#
La part permanente de la relaxation est évaluée de façon analogue à celle utilisée par/dans [Sellier2016]/[r7.01.36] pour la modélisation des déformations permanentes de fluage. Elle est évaluée en fonction du ratio de la déformation élastique \({\epsilon}^{r,\mathit{el}}\) divisée par le produit du temps caractéristique de Maxwell \({\tau}^{r,M}\), paramètre matériau, et par le coefficient de consolidation \(\mathit{Cc}\),
Avec \(\mathit{Cc}\) fonction de la déformation visqueuse atteinte au pas actuel, et d’un coefficient \(k\), coefficient d’amplitude de relaxation,
Dans cette équation, \(k\) permet de considérer l’impact non linéaire de la température (\(T\)) et du taux de charge (\(M\))sur le phénomène de relaxation,
Avec,
\({k}_{\mathit{ref}}\) , paramètre traduisant la capacité de relaxation du matériau, obtenu en considérant les paramètres \({\epsilon}_{\mathit{ref}}^{K}\) et \({\sigma}_{\mathit{ref}}\), respectivement le potentiel de référence de la relaxation et le taux de charge auquel ce potentiel à été fixé, tel que,
\({k}^{M}\) , permettant de considérer l’amplification non linéaire du taux de relaxation avec le taux de charge,
\(\mu\) étant le taux de charge défini en fonction de la limite d’élasticité \({f}_{y}\) tel que,
et \({\mu}^{\mathit{cr}}\) le taux de charge critique, traduisant la tendance non linéaire du matériau à augmenter son taux de relaxation avec l’augmentation du taux de charge, fonction de \(\chi\) coefficient de relaxation non linéaire (défini tel que la tendance soit linéaire pour \(\chi=1\) et devenant non linéaire pour \(\chi>1\)),
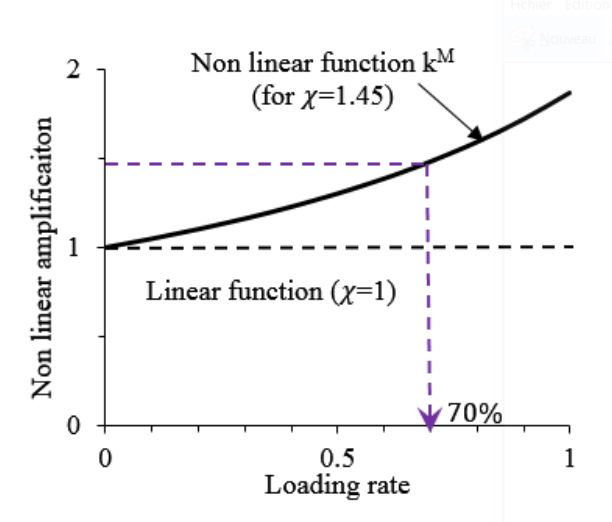
Fig. 278 Fonction d’amplification non linéaire \({k}^{M}\) issue de [Chhun2017]#
\({k}^{T}\) , coefficient dirigeant l’accélération de la relaxation avec l’augmentation de la température, et assurant l’évolution non linéaire pour d’importants niveaux de charge,
L’évolution non linéaire est dirigée par \({A}^{T}\), coefficient d’activation thermique fonction du taux de charge,
Avec \({A}_{\mathit{ref}}^{T}\) valeur de référence pour le coefficient d’activation thermique, \(\gamma\) coefficient de couplage pour l’impact des contraintes sur l’énergie d’activation, \({\mu}^{\mathit{TM}}\) le taux de charge pouvant modifier l’activation thermique. En considérant \({\mu}^{\mathit{thr}}\) le seuil minimum de taux de charge pour impacter le coefficient d’activation thermique fixé à \(0.7\), \({\mu}^{\mathit{TM}}\) s’écrit tel que,
Étage de Kelvin#
Concernant le comportement viscoélastique, et comme développé par [Chhun2018], celui-ci est assuré par un module de Kelvin. De la même façon que les déformations permanentes, celles-ci se voient aussi impactées par la température,
Avec \({\tau}^{r,k}\) et \({\Psi}^{k}\) respectivement le temps caractéristique pour les déformations de Kelvin et le taux de cette relaxation vis-à-vis de la déformation élastique, fonction de valeurs de référence et de \({k}^{T}\), coefficient multiplicateur d’activation thermique défini dans l’équation (4846),
Il est à noter que cette partie du modèle a été validée à l’échelle de la structure de laboratoire et appliquée sur une structure de grande échelle [Chhun2017].
Adhérence acier béton#
Dans la version du présent modèle, l’hypothèse d’adhérence parfaite est faite entre les deux matériaux acier et béton. De cette façon, la déformation axiale totale de l’armature est évaluée à partir de son allongement, supposé déterminé à partir de la matrice de déformation du béton \(\overline{\overline{\epsilon}}\) tel que,
Avec \({\epsilon}_{r}\) la déformation axiale de l’armature,
Et \({\gamma}_{r}\) la déformation de cisaillement
Il est à noter que la prise en compte d’un glissement à cette interface est possible mais non implémentée dans ce présent modèle. Celui-ci nécessitant des calculs non locaux, il n’est pas présenté ici mais peut être trouvé dans [Sellier2019].
Résumé des paramètres matériau de RGI_BETON_BA#
En plus des paramètres de RGI_BETON, il est nécessaire de fournir les paramètres suivants(les paramètres grisés sont à recaler pour chaque nouveau matériau) :
Paramètre |
Signification |
Symbole |
Valeur usuelle |
Unité |
YOUM |
Module d’Young propre au béton |
\({E}^{\mathit{be}}\) |
15-40 |
MPa |
NUM |
Coefficient de Poisson propre au béton |
\({\nu}^{\mathit{be}}\) |
0,2 |
|
NREN |
Nombre total de densité considérée |
\({N}^{r}\) |
[0 ; 5] |
|
ROA(i) |
Densité surfacique |
\({\rho}^{r}\) |
0.01 |
m²/m² |
DEQ(i) |
Diamètre équivalent |
\({\mathit{Deq}}^{r}\) |
0.01 |
m |
VR(i)1 |
Projection de la direction de l’armature selon \(\vec{x}\) |
\({e}_{1}^{r}\) |
1.0 |
|
VR(i)2 |
Projection de la direction de l’armature selon \(\vec{y}\) |
\({e}_{2}^{r}\) |
||
VR(i)3 |
Projection de la direction de l’armature selon \(\vec{z}\) |
\({e}_{3}^{r}\) |
||
YOR(i) |
Module d’Young |
\({E}^{r}\) |
200 000 |
MPa |
SYR(i) |
Limite d’élasticité |
\({f}_{y}^{r}\) |
500 |
MPa |
HPL(i) |
Module d’écrouissage |
\({H}^{r}\) |
1000 |
MPa |
TYR(i) |
Contrainte à l’interface |
\({\tau}^{r,1}\) |
6 |
MPa |
TMR(i) |
Temps caractéristiques irréversible pour le fluage (Maxwell) |
\({\tau}^{r,M}\) |
0.1 |
Jours |
TKR(i) |
Temps caractéristiques réversible pour le fluage (Kelvin) |
\({\tau}^{r,K}\) |
0.1 |
Jours |
PRE(i) |
Précontrainte initiale (imposée comme contrainte initiale au premier pas) |
\({\sigma}_{0}^{r}\) |
MPa |
|
EKR(i) |
Déformation caractéristique pour la relaxation |
\({\epsilon}_{\mathit{ref}}^{K}\) |
1e-4 |
|
SKR(i) |
Contrainte caractéristique pour le calage de |
\({\sigma}_{\mathit{ref}}\) |
1260 |
MPa |
XFL(i) |
Exposant pour l’activation thermique de la relaxation |
\({n}^{r}\) |
2, 55 |
|
XNR(i) |
Coefficient de relaxation non linéaire |
\(\chi\) |
1,216 |
|
TTR(i) |
Température de référence pour le calage de \({\tau}^{r,M}\) |
\({T}_{\mathit{ref}}\) |
38 |
°C |
CTM(i) |
Coefficient de couplage pour l’impact des contraintes sur l’énergie d’activation |
\(\gamma\) |
4, 8 |
|
ATR(i) |
Valeur de référence pour le coefficient d’activation thermique |
\({A}_{\mathit{ref}}^{T}\) |
1, 5e-4 |
|
MUS(i) |
Seuil au-delà duquel l’activation thermique devient fonction du taux de charge |
\({\mu}^{\mathit{thr}}\) |
0, 7 |
|
YKY(i) |
Coefficient de réduction de relaxation réversible évalué à \({T}^{\mathit{ref}}\) |
\({\Psi}_{\mathit{ref}}^{k}\) |
100 |
Variables internes du modèle#
Voici les variables internes stockées en chaque point de Gauss dans l’implémentation du modèle
Signification des variables internes |
Numéro |
Symbole |
Nom |
Variables scalaires |
|||
Armature n°1 |
|||
Déformation axiale |
115 |
ERT1 |
\({\epsilon}^{r}\) |
Déformation plastique |
116 |
ERP1 |
\({\epsilon}^{r,\mathit{pl}}\) |
Contrainte axiale |
117 |
SNR1 |
\({\sigma}_{0}^{r}\) |
Déformation de Maxwell |
118 |
ERM1 |
\({\epsilon}^{r,M}\) |
Taux de chargement maximal |
119 |
MUR1 |
\({\mu}^{\mathit{MAX}}\) |
Déformation de Kelvin |
120 |
EKR1 |
\({\epsilon}^{r,K}\) |
Précontrainte résiduelle |
121 |
SPR1 |
\({\sigma}_{\mathit{res}}^{r}\) |
Armature n°2 |
|||
Déformation axiale |
122 |
ERT2 |
\({\epsilon}^{r}\) |
Déformation plastique |
123 |
ERP2 |
\({\epsilon}^{r,\mathit{pl}}\) |
Contrainte axiale |
124 |
SNR2 |
\({\sigma}_{0}^{r}\) |
Déformation de Maxwell |
125 |
ERM2 |
\({\epsilon}^{r,M}\) |
Taux de chargement maximal |
126 |
MUR2 |
\({\mu}^{\mathit{MAX}}\) |
Déformation de Kelvin |
127 |
EKR2 |
\({\epsilon}^{r,K}\) |
Précontrainte résiduelle |
128 |
SPR2 |
\({\sigma}_{\mathit{res}}^{r}\) |
Armature n°3 |
|||
Déformation axiale |
129 |
ERT3 |
\({\epsilon}^{r}\) |
Déformation plastique |
130 |
ERP3 |
\({\epsilon}^{r,\mathit{pl}}\) |
Contrainte axiale |
131 |
SNR3 |
\({\sigma}_{0}^{r}\) |
Déformation de Maxwell |
132 |
ERM3 |
\({\epsilon}^{r,M}\) |
Taux de chargement maximal |
133 |
MUR3 |
\({\mu}^{\mathit{MAX}}\) |
Déformation de Kelvin |
134 |
EKR3 |
\({\epsilon}^{r,K}\) |
Précontrainte résiduelle |
135 |
SPR3 |
\({\sigma}_{\mathit{res}}^{r}\) |
Armature n°4 |
|||
Déformation axiale |
136 |
ERT4 |
\({\epsilon}^{r}\) |
Déformation plastique |
137 |
ERP4 |
\({\epsilon}^{r,\mathit{pl}}\) |
Contrainte axiale |
138 |
SNR4 |
\({\sigma}_{0}^{r}\) |
Déformation de Maxwell |
139 |
ERM4 |
\({\epsilon}^{r,M}\) |
Taux de chargement maximal |
140 |
MUR4 |
\({\mu}^{\mathit{MAX}}\) |
Déformation de Kelvin |
141 |
EKR4 |
\({\epsilon}^{r,K}\) |
Précontrainte résiduelle |
142 |
SPR4 |
\({\sigma}_{\mathit{res}}^{r}\) |
Armature n°5 |
|||
Déformation axiale |
143 |
ERT5 |
\({\epsilon}^{r}\) |
Déformation plastique |
144 |
ERP5 |
\({\epsilon}^{r,\mathit{pl}}\) |
Contrainte axiale |
145 |
SNR5 |
\({\sigma}_{0}^{r}\) |
Déformation de Maxwell |
146 |
ERM5 |
\({\epsilon}^{r,M}\) |
Taux de chargement maximal |
147 |
MUR5 |
\({\mu}^{\mathit{MAX}}\) |
Déformation de Kelvin |
148 |
EKR5 |
\({\epsilon}^{r,K}\) |
Précontrainte résiduelle |
149 |
SPR5 |
\({\sigma}_{\mathit{res}}^{r}\) |
Contraintes dans le béton seul |
|||
Direction 11 (repère global) |
150 |
SBE1 |
\({\sigma}_{11}^{\mathit{be}}\) |
Direction 22 (repère global) |
151 |
SBE2 |
\({\sigma}_{22}^{\mathit{be}}\) |
Direction 33 (repère global) |
152 |
SBE3 |
\({\sigma}_{33}^{\mathit{be}}\) |
Direction 12 (repère global) |
153 |
SBE4 |
\({\sigma}_{12}^{\mathit{be}}\) |
Direction 13 (repère global) |
154 |
SBE5 |
\({\sigma}_{13}^{\mathit{be}}\) |
Direction 23 (repère global) |
155 |
SBE6 |
\({\sigma}_{23}^{\mathit{be}}\) |
Contraintes principale du béton seul |
|||
Contrainte principale majeure |
156 |
SPM1 |
\({\sigma}_{I}\) |
Contrainte principale secondaire |
157 |
SPM2 |
\({\sigma}_{\mathit{II}}\) |
Contrainte principale mineure |
158 |
SPM3 |
\({\sigma}_{\mathit{III}}\) |
Organigramme général de résolution#
Après évaluation du comportement du béton, le modèle évalue la contribution de l’armature. Cette notice visant a expliciter uniquement cette contribution, celle du béton ne sera pas décrite ici. Sa loi de comportement détaillée est présentée dans la notice [r7.01.30]. L’organigramme présenté ci-dessous en récapitule les principales étapes de la résolution du calcul pour la prise en compte d’armatures homogénéisées au béton.
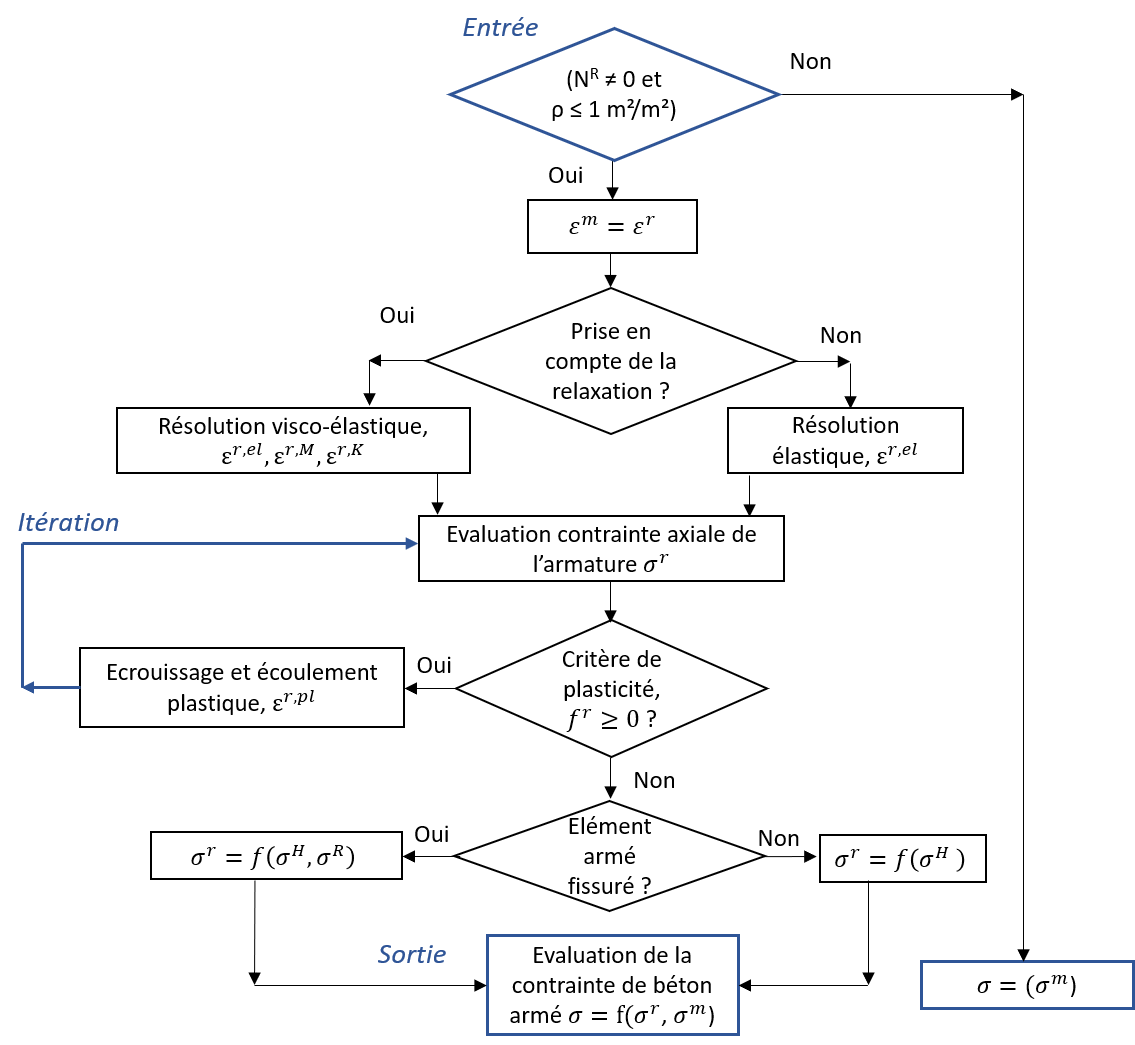
Fig. 279 Organigramme de résolution#
Comme dit précédemment, la première considération qu’induit ces armatures homogénéisées est l’hypothèse d’adhérence parfaite. De part ce fait, la déformation finale du béton est récupérée et la contrainte dans l’armature en est déduite. La contrainte est par suite soumise à un critère de plasticité. Si celui-ci est actif, l’armature est plastifiée et une itération est faite pour ré-évaluer la valeur de sa contrainte en considérant la déformation plastique induite.
Une fois la contrainte de l’armature obtenue, c’est l’endommagement du béton que l’on va considérer. En effet, si l’élément armé est fissuré, on considère l’effet Goujon pour évaluer la résultante en partie fissurée ainsi que sa réduction en partie saine. Enfin, la contrainte du béton armé en est déduite en combinant ces contraintes avec celles du béton grâce à la loi d’homogénéisation.
Intégration numérique#
Dans ce paragraphe, l’intégration numérique de la prise en compte des armatures réparties est présentée. Le modèle a été intégré selon un schéma implicite.
Schéma d’intégration numérique#
Le schéma d’intégration implicite consiste en une phase de prédiction visco-élastique qui prend en compte le fluage. Elle est suivie d’une phase de correction plastique dans l’espace des contraintes effectives si au moins l’un des critères est atteint.
La notation pseudo-vecteur(tenseur symétrique) est adoptée.
Phase de prédiction viscoélastique#
Les trois équations suivantes relient les incréments de déformations élastiques et de fluage (Maxwell et Kelvin) à la déformation totale. Le schéma est semi-implicite et \(\theta\) vaut \(1/2\),
En synthétisant,
Avec \(\overline{\overline{L}}\) établi en base principale de \(d'\epsilon\) et \(\overline{X}=\left(\begin{array}{c}d{\epsilon}^{r,\mathit{el}}\\ d{\epsilon}^{r,M}\\ d{\epsilon}^{r,K}\end{array}\right)\)
Ainsi, on a,
L’incrément de contrainte s’écrit,
Ainsi,
Phase de correction#
Après la phase de prédiction visco-élastique, une évaluation des critères est réalisée,
Avec,
Si le critère est activé, on réalise un écoulement en considérant la correction pour le fluage associé,
Avec une loi d’écoulement associée,
Les variations de contrainte entraînent une correction viscoélastique, ce qui oblige à coupler les équations de tir viscoélastique avec celles du retour radial, le système suivant est alors obtenu et résolu,
Avec \([\overline{Z}]\) la matrice contenant tous les coefficients déduits des conditions d’annulation de critère et de comportement viscoélastique.
Les incréments sont utilisés pour obtenir les valeurs admissibles des variables d’état en fin de pas. Ces dernières peuvent alors être utilisées pour calculer les endommagements conformément à l’algorithme de résolution.
Bibliographie#
Ajimi WT, Chataigner S, Gaillet L: Influence of low elevated temperature on the mechanical behavior of steel rebars and prestressing wires in nuclear containment structures. Construction and Building Materials 2017;134:462–470.
Chhun P: Modélisation du comportement thermo-hydro-chemo-mécanique des enceintes de confinement nucléaire en béton armé-précontraint [Internet] 2017;Available from: http://www.theses.fr/2017TOU30139/document
Chhun P, Sellier A, Lacarriere L, Chataigner S, Gaillet L: Incremental modeling of relaxation of prestressing wires under variable loading and temperature. Construction and Building Materials 2018;163:337–342.
Sellier A, Multon S, Buffo-Lacarrière L, Vidal T, Bourbon X, Camps G: Concrete creep modelling for structural applications: non-linearity, multi-axiality, hydration, temperature and drying effects. Cement and Concrete Research 2016;79:301–315.
Sellier A: Anisotropic Damage and Visco-Elasto-Plasticity Applied to Multiphasic Materials [Internet], LMDC - Laboratoire Matériaux et Durabilité des Constructions de Toulouse ; Université de Toulouse III - Paul Sabatier ; INSA de Toulouse, 2018.Available from: https://hal.insa-toulouse.fr/hal-01710289
Sellier A, Millard A: A homogenized formulation to account for sliding of non-meshed reinforcements during the cracking of brittle matrix composites: Application to reinforced concrete. Engineering Fracture Mechanics 2019;213:182–196.
Fonctionnalités et vérification#
Ce document concerne la loi de comportement RGI_BETON_BA (mots clés COMPORTEMENT de STAT_NON_LINE) et leurs matériaux associés portant le même nom (commande DEFI_MATERIAU). Cette loi de comportement est vérifiée par les cas tests suivants:
SSNV269 |
Validation sur échantillon (Vieillissement d’éprouvette réactive) |