v2.06.103 SHLL103 – Réponse harmonique d’un rotor avec deux disques et deux paliers non symétriques, soumis à l’effet gyroscopique#
Résumé :
Ce test permet de valider le calcul de la réponse harmonique d’un système d’arbres tournant avec prise en compte de l’effet gyroscopique et des paliers à caractéristiques non symétriques.
Dans ce test, on a un modèle de rotor avec deux disques, supporté par deux paliers hydrodynamiques, dont les matrices de raideur et d’amortissement linéarisés sont non symétriques. Cet exemple ainsi que les résultats de référence correspondants sont tirés du manuel de qualification de ROTORINSA, [bib2], logiciel de calcul aux éléments finis destiné à prévoir le comportement dynamique de rotors en flexion.
Une bonne concordance est observée entre les résultats de Code_Aster et la solution de référence.
Solution de référence#
Méthode de calcul#
La solution de référence est celle fournie par le code ROTORINSA, code éléments finis (de type poutre de Timoshenko) destiné à prévoir le comportement dynamique de rotors en flexion.
Grandeurs et résultats de référence#
Ce sont des calculs de réponse à une force harmonique avec quatre vitesses de rotation du rotor différentes : 0, 40000, 50000 et 60000 \(\mathit{tr}/min\) .
La fréquence d’excitation de la force harmonique est \(1\mathit{Hz}\) , \(25\mathit{Hz}\) et \(250\mathit{Hz}\) successivement.
A chaque vitesse de rotation du rotor, deux calculs sont effectués :
effort harmonique unitaire suivant \(X\) appliqué au nœud du disque \(\mathit{D2}\)
effort harmonique unitaire suivant \(Z\) appliqué au nœud du disque \(\mathit{D2}\)
A chaque fois, on relève les valeurs des maximas d’amplitude et de phase au nœud du disque \(\mathit{D2}\) .
Références bibliographiques#
ROTORINSA, logiciel éléments finis destiné à prévoir le comportement dynamique de rotors en flexion, LaMCoS UMR5259, INSA-Lyon.
Modélisation A#
Caractéristiques de la modélisation#
Modélisation : 12 Éléments équi-répartis de poutre POU_D_T dans la direction \(y\)
Caractéristiques du maillage#
Le rotor est maillé en 12 éléments finis d’arbre de type POU_D_T et comporte 4 éléments discrets de type DIS_TR pour la modélisation des disques et des paliers.
Nombre de nœuds : 13
Nombre et type d’éléments: 12 SEG2
4 POI1
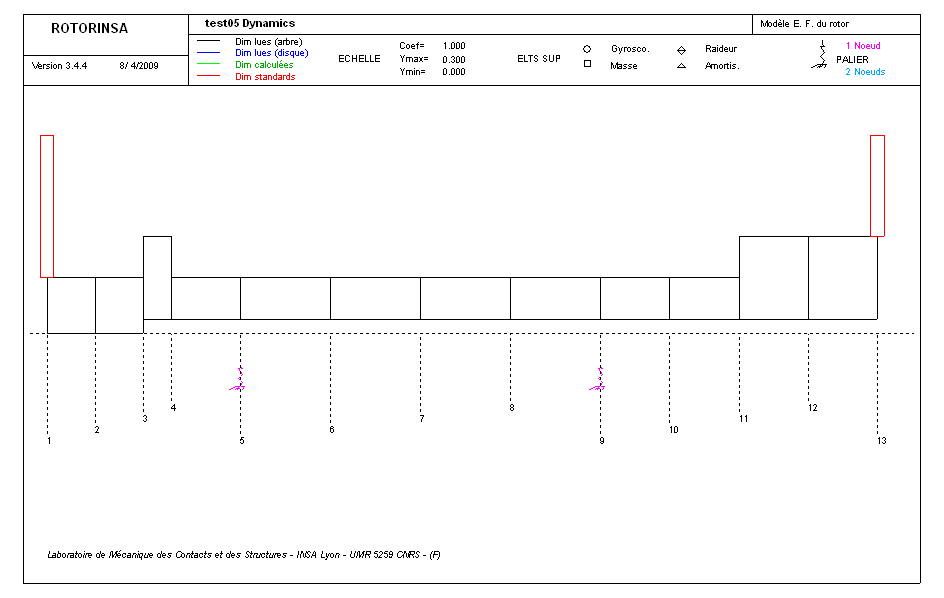
Images 3.2-1: Caractéristiques du modèle éléments finis sous ROTORINSA
Chargement#
Effort harmonique unitaire, appliqué sur le nœud correspondant au disque \(\mathit{D2}\) .
Résultats#
Rotor à l’arrêt (OMEGA = 0 tr/min)#
Effort harmonique unitaire suivant X#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.10319E-06 |
0.10331E-06 |
0.41444E-07 |
0.41409E-07 |
25 |
0.10445E-06 |
0.10457E-06 |
0.42396E-07 |
0.42362E-07 |
250 |
0.19043E-06 |
0.19380E-06 |
0.70701E-06 |
0.71396E-06 |
Tableau 4.1.1-1 : Déplacements X et Z en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-0.0265 |
-0.0264 |
-0.0644 |
-0.0652 |
25 |
-0.6705 |
-0.6684 |
-1.6253 |
-1.6449 |
250 |
-137.1030 |
-137.7761 |
139.5277 |
141.6458 |
Tableau 4.1.1-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Effort harmonique unitaire suivant Z#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (m) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.26277E-08 |
0.26302E-08 |
0.83297E-07 |
0.8341E-07 |
25 |
0.27046E-08 |
0.27073E-08 |
0.84098E-07 |
0.84211E-07 |
250 |
0.72302E-07 |
0.72635E-07 |
0.32801E-06 |
0.33019E-06 |
Tableau 4.1.2-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en Hz |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-179.8568 |
-179.8576 |
179.9769 |
179.9770 |
25 |
-176.4619 |
-176.4823 |
179.4165 |
179.4181 |
250 |
-5.8731 |
-6.2622 |
115.2685 |
115.3362 |
Tableau 4.1.2-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Rotor tournant à OMEGA = 40000 tr/min#
Effort harmonique unitaire suivant X#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.10319E-06 |
0.10331E-06 |
0.41444E-07 |
0.41410E-07 |
25 |
0.10455E-06 |
0.10467E-06 |
0.42518E-07 |
0.42486E-07 |
250 |
0.48971E-07 |
0.48728E-07 |
0.23315E-06 |
0.23324E-06 |
Tableau 4.2.1-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-0.0068 |
-0.0067 |
-0.1637 |
-0.1647 |
25 |
-0.1664 |
-0.1632 |
-4.0901 |
-4.1134 |
250 |
-141.0235 |
-140.1804 |
98.1335 |
98.0294 |
Tableau 4.2.1-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Effort harmonique unitaire suivant Z#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.26295E-08 |
0.26320E-08 |
0.83297E-07 |
0.83408E-07 |
25 |
0.36470E-08 |
0.36511E-08 |
0.84180E-07 |
0.84293E-07 |
250 |
0.11311E-06 |
0.11328E-06 |
0.10572E-06 |
0.10612E-06 |
Tableau 4.2.2-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-177.9360 |
-177.9355 |
179.9964 |
179.9965 |
25 |
-138.3688 |
-138.3625 |
179.9183 |
179.9203 |
250 |
25.4329 |
25.4724 |
103.2116 |
103.5733 |
Tableau 4.2.2-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Rotor tournant à OMEGA = 50000 tr/min#
Effort harmonique unitaire suivant X#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.10319E-06 |
0.10331E-06 |
0.41444E-07 |
0.41410E-07 |
25 |
0.10460E-06 |
0.10472E-06 |
0.42577E-07 |
0.42545E-07 |
250 |
0.37618E-07 |
0.37498E-07 |
0.19422E-06 |
0.19431E-06 |
Tableau 4.3.1-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-0.0019 |
-0.0018 |
-0.1886 |
-0.1895 |
25 |
-0.0402 |
-0.0367 |
-4.7040 |
-4.7283 |
250 |
-128.6350 |
-127.5965 |
94.7082 |
94.6331 |
Tableau 4.3.1-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Effort harmonique unitaire suivant Z#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.26304E-08 |
0.26329E-08 |
0.83297E-07 |
0.83408E-07 |
25 |
0.40459E-08 |
0.40507E-08 |
0.84217E-07 |
0.84331E-07 |
250 |
0.10980E-06 |
0.10994E-06 |
0.89435E-07 |
0.89793E-07 |
Tableau 4.3.2-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-177.4564 |
-177.4555 |
-179.9987 |
-179.9986 |
25 |
-132.3829 |
-132.3742 |
-179.9561 |
-179.9539 |
250 |
28.1427 |
28.2043 |
108.0535 |
108.4359 |
Tableau 4.3.2-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Rotor tournant à OMEGA = 60000 tr/min#
Effort harmonique unitaire suivant X#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.10319E-06 |
0.10331E-06 |
0.41444E-07 |
0.41410E-07 |
25 |
0.10466E-06 |
0.10478E-06 |
0.42647E-07 |
0.42616E-07 |
250 |
0.30475E-07 |
0.30507E-07 |
0.16473E-06 |
0.16479E-06 |
Tableau 4.4.1-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
0.0030 |
0.0313 |
-0.2134 |
-0.2144 |
25 |
0.0862 |
0.0899 |
-5.3164 |
-5.3416 |
250 |
-111.7419 |
-110.5334 |
92.0178 |
91.9669 |
Tableau 4.4.1-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Effort harmonique unitaire suivant Z#
Fréquence en \(\mathit{Hz}\) |
Déplacement \(X\) de référence (\(m\) ) |
Déplacement \(X\) Code_Aster (\(m\) ) |
Déplacement \(Z\) de référence (\(m\) ) |
Déplacement \(Z\) Code_Aster (\(m\) ) |
1 |
0.26314E-08 |
0.26339E-08 |
0.83297E-07 |
0.83408E-07 |
25 |
0.44804E-08 |
0.44860E-08 |
0.84262E-07 |
0.84375E-07 |
250 |
0.10475E-06 |
0.10486E-06 |
0.78438E-07 |
0.78777E-07 |
Tableau 4.4.2-1 : Déplacements \(X\) et \(Z\) en fonction de la fréquence d’excitation
Fréquence en \(\mathit{Hz}\) |
Phase \(X\) de référence (degrés) |
Phase \(X\) Code_Aster (degrés) |
Phase \(Z\) de référence (degrés) |
Phase \(Z\) Code_Aster (degrés) |
1 |
-176.9771 |
-176.9759 |
-179.9938 |
-179.9937 |
25 |
-127.4844 |
-127.4742 |
-179.8303 |
-179.8279 |
250 |
30.2686 |
30.3438 |
113.8704 |
114.2592 |
Tableau 4.4.2-2 : Phases \(X\) et \(Z\) en fonction de la fréquence d’excitation
Synthèse des résultats#
On constate que les calculs de Code_Aster reproduisent fidèlement ceux de la référence. On constate une bonne implantation de l’effet gyroscopique pour l’élément de poutre et l’élément discret, dans le cas de calcul harmonique.