v2.01.102 SDLD102 - Sous structuration transitoire : Système 3 masses-4 ressorts#
Résumé:
Le domaine d’application de ce test concerne la dynamique des structures. Il permet de valider les schémas d’intégration à pas de temps adaptatif “ADAPT_ORDRE2’et “RUNGE_KUTTA_54” de l’opérateur de calcul transitoire sur base modale ainsi que le calcul de réponse transitoire linéaire sur une base modale calculée par sous-structuration (pour les 5schémas d’intégration: “EULER”, “DEVOGE”, “NEWMARK”, “RUNGE_KUTTA_32” et “ADAPT_ORDRE2”). En particulier, le cas de l’application d’un amortissement réduit aux modes dynamiques des bases de projection des sous-structures est traité.
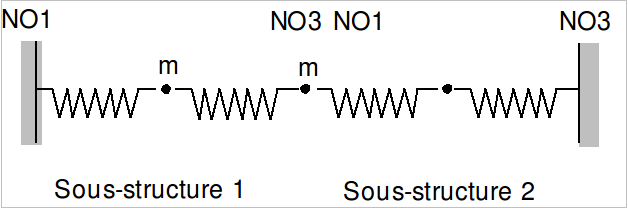
Il s’agit de déterminer la réponse transitoire d’un système composé de 3masses et 4ressorts, encastré à ses extrémités et soumis à une force constante à partir de l’instant initial. Les ressorts sont modélisés par des éléments de type “DIS_TR” et les masses par des éléments de type “DIS_T”.
Six modélisations sont proposées. Dans la troisième modélisation, la structure est amortie. Les méthodes de calcul transitoire par sous-structuration avec interfaces de type Craig-Bampton (“CRAIGB”) et MacNeal (“MNEAL”) sont testées. On teste également la prise en compte de l’option RELA_EFFO_DEPL dans le cas d’un calcul de réponse par sous-structuration dynamique. Les résultats de référence qui leur sont associés sont issus d’un calcul analytique. Dans la troisième, on impose un amortissement réduit de \(\text{1\%}\) aux modes dynamiques des bases de projection des sous‑structures. L’équation transitoire vérifiée par la structure complète a été obtenue analytiquement. Sa résolution, qui fait office de référence, a été réalisée par le logiciel Maple.
Solution de référence#
Méthode de calcul utilisée pour la solution de référence#
Structure non amortie#
Dans ce cas, la solution de référence peut être obtenue analytiquement:
\(m(\begin{array}{ccc}1& 0& 0\\ 0& 1& 0\\ 0& 0& 1\end{array})(\begin{array}{c}\ddot{{x}_{1}}\\ \ddot{{x}_{2}}\\ \ddot{{x}_{3}}\end{array})+k(\begin{array}{ccc}2& -1& 0\\ -1& 2& -1\\ 0& -1& 2\end{array})(\begin{array}{c}{x}_{1}\\ {x}_{2}\\ {x}_{3}\end{array})=(\begin{array}{c}1\\ 0\\ 0\end{array})\)
Les pulsations propres du système masse-ressort valent:
\({\omega}_{1}^{2}=(2-\sqrt{2})\frac{k}{m}\) \({\omega}_{2}^{2}=2\frac{k}{m}\) \({\omega}_{3}^{2}=(2+\sqrt{2})\frac{k}{m}\)
de déformées modales respectives:
\({\phi }_{1}=(\begin{array}{c}\sqrt{2}\\ 2\\ \sqrt{2}\end{array})\) \({\phi }_{2}=(\begin{array}{}1\\ 0\\ -1\end{array})\) \({\phi }_{3}=(\begin{array}{c}-\sqrt{2}\\ 2\\ -\sqrt{2}\end{array})\)
Projetée sur la base des modes propres, l’équation transitoire devient \({\eta}_{i}\) avec comme coordonnées généralisées:
\(m(\begin{array}{ccc}8& 0& 0\\ 0& 2& 0\\ 0& 0& 8\end{array})(\begin{array}{c}\ddot{{\eta}_{1}}\\ \ddot{{\eta}_{2}}\\ \ddot{{\eta}_{3}}\end{array})+\mathrm{4k}(\begin{array}{ccc}4-\sqrt{2}& 0& 0\\ 0& 1& 0\\ 0& 0& 4+2\sqrt{2}\end{array})(\begin{array}{c}{\eta}_{1}\\ {\eta}_{2}\\ {\eta}_{3}\end{array})=(\begin{array}{c}+\sqrt{2}\\ 2\\ -\sqrt{2}\end{array})\)
Le système peut être résolu analytiquement. On obtient:
\(\left\lbrace \eta (t)\right\rbrace =\frac{1}{\mathrm{2m}}(\begin{array}{c}\frac{\sqrt{2}}{4{\omega}_{1}^{2}}(1-\cos{\omega}_{1}t)\\ \frac{1}{{\omega}_{2}^{2}}(1-\cos{\omega}_{2}t)\\ \frac{\sqrt{2}}{4{\omega}_{3}^{2}}(\cos{\omega}_{3}t-1)\end{array})\)
La solution sur base physique est obtenue en utilisant la transformation de Ritz:
\(x(t)=(\begin{array}{c}{x}_{1}\\ {x}_{2}\\ {x}_{3}\end{array})=\phi \eta =(\begin{array}{ccc}\sqrt{2}& 1& -\sqrt{2}\\ 2& 0& 2\\ \sqrt{2}& -1& \sqrt{2}\end{array})(\begin{array}{c}{\eta}_{1}\\ {\eta}_{2}\\ {\eta}_{3}\end{array})\)
Structure amortie#
L’amortissement est appliqué aux modes propres des bases de projection des sous-structures encastrées (amortissement réduit). Dans ce cas, on aboutit à l’équation transitoire en coordonnées généralisées suivante (bib[1]):
\(m(\begin{array}{ccc}8& 0& 0\\ 0& 2& 0\\ 0& 0& 8\end{array})(\begin{array}{c}\ddot{{\eta}_{1}}\\ \ddot{{\eta}_{2}}\\ \ddot{{\eta}_{3}}\end{array})+4\varepsilon \sqrt{\mathrm{2km}}(\begin{array}{ccc}3-2\sqrt{2}& 0& -1\\ 0& 1& 0\\ -1& 0& 3+2\sqrt{2}\end{array})(\begin{array}{c}\dot{{\eta}_{1}}\\ \dot{{\eta}_{2}}\\ \dot{{\eta}_{3}}\end{array})+\mathrm{4k}(\begin{array}{ccc}4-\sqrt{2}& 0& 0\\ 0& 1& 0\\ 0& 0& 4+2\sqrt{2}\end{array})(\begin{array}{c}{\eta}_{1}\\ {\eta}_{2}\\ {\eta}_{3}\end{array})=(\begin{array}{c}+\sqrt{2}\\ 1\\ -\sqrt{2}\end{array})\)
Ce système n’étant pas découplé, il a été résolu à l’aide du logiciel Maple. On a obtenu \((\varepsilon =0.01)\) :
\(\left\lbrace \eta (t)\right\rbrace =\frac{1}{\mathrm{2m}}(\begin{array}{c}\frac{\sqrt{2}}{4{\omega}_{1}^{2}}(1-{e}^{-\frac{t}{{\tau}_{1}}}\cos{\omega}_{1}t)\\ \frac{1}{{\omega}_{2}^{2}}(1-{e}^{-\frac{t}{{\tau}_{2}}}\cos{\omega}_{2}t)\\ \frac{\sqrt{2}}{4{\omega}_{3}^{2}}({e}^{-\frac{t}{{\tau}_{3}}}\cos{\omega}_{3}t-1)\end{array})\)
avec \({\tau}_{1}=1.65{10}^{3}s\) , \({\tau}_{2}=\frac{1}{\varepsilon {\omega}_{2}}=\frac{100}{\sqrt{2}}\) et \({\tau}_{3}=4.85{10}^{1}s\)
On obtient donc une formulation proche du cas non amorti, mais dans laquelle interviennent des termes exponentiels qui caractérisent l’amortissement.
La solution sur base physique est obtenue en utilisant la transformation de Ritz:
\(x(t)=(\begin{array}{c}{x}_{1}\\ {x}_{2}\\ {x}_{3}\end{array})=\phi \eta =(\begin{array}{ccc}\sqrt{2}& 1& -\sqrt{2}\\ 2& 0& 2\\ \sqrt{2}& -1& \sqrt{2}\end{array})(\begin{array}{c}{\eta}_{1}\\ {\eta}_{2}\\ {\eta}_{3}\end{array})\)
Résultats de référence#
Structure non amortie:
Déplacement, vitesse et accélération du nœud \({x}_{2}\) à l’instant \(t=\mathrm{80 }s\) :
\(\begin{array}{ccc}{x}_{2}(80)& =& 4.1700{10}^{-1}m\\ \dot{{x}_{2}}(80)& =& -4.3011{10}^{-1}{\mathit{m.s}}^{-1}\\ \ddot{{x}_{2}}(80)& =& 3.3749{10}^{-1}{\mathit{m.s}}^{-2}\end{array}\)
Structure amortie:
Déplacement du nœud \({x}_{2}\) à l’instant \(t=\mathrm{80 }s\) :
\({x}_{2}(80)=4.9867{10}^{-1}m\)
Incertitude sur la solution#
Cas non amorti: solution analytique.
Cas amorti: solution semi-analytique.
Référence bibliographique#
C.VARE- Rapport HP61/95/025/A- « Mise en œuvre du calcul transitoire non linéaire par sous-structuration dans le Code_Aster « .
Modélisation A#
Caractéristiques de la modélisation#
Le système est divisé en 2 sous-structures:

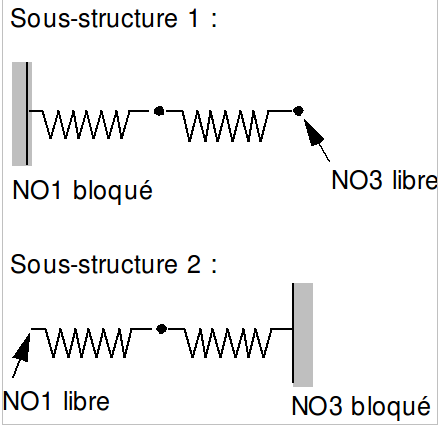
En situation, les deux sous-structures sont reliées au niveau de la 2ème masse. L’interface dynamique de la 1ère sous-structure est constituée d’une masse m au niveau du nœud \(\mathit{NO3}\) du maillage et coïncide avec l’interface dynamique de la 2ème sous-structure qui ne comporte aucune masse et est simplement bloquée au niveau du nœud \(\mathit{NO1}\) .
Les modes propres du système complet sont calculés en utilisant la méthode de calcul modal par sous-structuration avec interfaces de type “Craig-Bampton” (interfaces bloquées). Les bases de chaque sous-structure sont composées d’un mode dynamique et d’un mode contraint.
La réponse transitoire du système est calculée sur la base modale calculée par sous-structuration.
Les pas de temps utilisés sont égaux à: \({10}^{-2}s\) en “EULER”, \({10}^{-2}s\) en “NEWMARK”, \({10}^{-2}s\) en “DEVOGE”, \({10}^{-1}s\) en “ADAPT_ORDRE2” (pour ce dernier, il s’agit du pas de temps initial de l’algorithme et le pas de temps maximal est, lui, fixé à formule \(0,15s\) puis formule \(0,2s\) pour optimiser le temps de calcul).
Caractéristiques du maillage de la sous-structure#
Nombre de nœuds: 3
Nombre de mailles et types: 2 SEG2
Grandeurs testées et résultats#
Calcul par recombinaison modale sans sous-structuration : Méthode ADAPT_ORDRE2 et RUNGE_KUTTA_54
Identification |
Référence |
Méthode : ADAPT_ORDRE2 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathit{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathit{m.s}}^{-2}\) ) |
3.3375 10–1 |
Méthode : RUNGE_KUTTA_54 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3375 10–1 |
Calcul par sous-structuration |
|
Méthode : EULER |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3375 10–1 |
Méthode : DEVOGE |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3375 10–1 |
Méthode :NEWMARK |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathit{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathit{m.s}}^{-2}\) ) |
3.3375 10–1 |
Méthode :RUNGE_KUTTA_32 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathit{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathit{m.s}}^{-2}\) ) |
3.3375 10–1 |
Méthode : ADAPT_ORDRE2 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3375 10–1 |
Modélisation B#
Caractéristiques de la modélisation#
Cette modélisation est identique à la précédent si ce n’est que les modes propres du système complet sont calculés en utilisant la méthode de calcul modal par sous-structuration avec interfaces de type “MacNeal” (interfaces libres). Les bases de chaque sous-structure sont composées d’un mode dynamique et d’un mode d’attache.
La réponse transitoire du système est calculée sur la base modale calculée par sous‑structuration.
Plus précisément, les sous-structures étudiées ont leurs interfaces libres:
Les pas de temps utilisés valent: \({10}^{-2}s\) en EULER, \({10}^{-2}s\) en NEWMARK, \({10}^{-2}s\) en DEVOGE, \({10}^{-2}s\) en ADAPT_ORDRE2 (pour ce dernier, il s’agit du pas de temps initial de l’algorithme et le pas de temps maximal est, lui, fixé à formule \(0,1s\) pour optimiser le temps de calcul).
Caractéristiques du maillage de la sous-structure#
Nombre de nœuds: 3
Nombre de mailles et types: 2 SEG2
Grandeurs testées et résultats#
Identification |
Référence |
Méthode : EULER |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3749 10–1 |
Méthode : NEWMARK |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3749 10–1 |
Méthode : DEVOGE |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3749 10–1 |
Méthode : ADAPT_ORDRE2 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.1700 10–1 |
Nœud \({x}_{2}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
–4.3011 10–1 |
Nœud \({x}_{2}\) , accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3749 10–1 |
Modélisation C#
Caractéristiques de la modélisation#
Les modes propres du système complet sont calculés en utilisant la méthode de calcul modal par sous-structuration avec interfaces de type “Craig-Bampton” (interfaces bloquées). Les bases de chaque sous-structure sont composées d’un mode dynamique et d’un mode contraint.
Au mode dynamique de chaque sous-structure est associé un amortissement réduit de \(\text{1\%}\) .
La réponse transitoire du système amorti est calculée sur la base modale calculée par sous‑structuration.
Les pas de temps pris sont égaux à: \({10}^{-2}s\) en EULER, \({10}^{-2}s\) en NEWMARK, \({10}^{-2}s\) en ADAPT_ORDRE2 (pour ce dernier, il s’agit du pas de temps initial de l’algorithme et le pas de temps maximal est, lui, fixé à formule \(0,1s\) pour optimiser le temps de calcul).
Caractéristiques du maillage de la sous-structure#
Nombre de nœuds: 3
Nombre de mailles et types: 2 SEG2
Grandeurs testées et résultats#
Identification |
Référence |
Méthode : EULER |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.9867 10–1 |
Méthode : NEWMARK |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.9867 10–1 |
Méthode :ADAPT_ORDRE2 |
|
Nœud \({x}_{2}\) , déplacement (\(m\) ) |
4.9867 10–1 |
Remarque : les tests de la modélisation C sont dédoublés car on veut tester le calcul modal sur les matrices projetées avec passage automatique sur le solveur MUMPS alors que l’utilisateur a demandé le solveur MULT_FRONT, qui n’est pas disponible dans ce cas. Les résultats sont identiques.
Modélisation D#
Caractéristiques de la modélisation#
Les caractéristiques de la modélisation D sont exactement identiques à celle de la modélisation A. En revanche, on choisi la méthode «ELIMINE» pour gérer les conditions aux limites et l’assemblage des sous structures.
Grandeurs testées et résultats#
Identification |
Référence |
Méthode : EULER |
|
Nœud \({x}_{3}\) , déplacement (\(m\) ) |
4.17 10–1 |
Méthode : EULER |
|
Nœud \({x}_{3}\) , vitesse (\({\mathit{m.s}}^{-1}\) ) |
-4.3011 10–1 |
Méthode :EULER |
|
Nœud \({x}_{3}\) , Accélération (\({\mathit{m.s}}^{-2}\) ) |
3.3749 10–1 |
Modélisation E#
Caractéristiques de la modélisation#
Les caractéristiques de la modélisation E sont exactement identiques à celle de la modélisation A. En revanche, on utilise les commandes CREA_ELEM_SSD et ASSE_ELEM_SSD pour la création et l’assemblage des macro-éléments dynamiques. On présente également comment on crée les conditions initiales pour un calcul transitoire sur base modale par sous-structuration dynamique. Le calcul de la réponse directe (sans sous-structuration) n’est pas repris dans cette modélisation.
Grandeurs testées et résultats#
Identification |
Référence |
Méthode : EULER |
|
Nœud \({x}_{3}\) , déplacement (\(m\) ) |
4.17 10–1 |
Méthode : EULER |
|
Nœud \({x}_{3}\) , vitesse (\({\mathit{m.s}}^{-1}\) ) |
-4.3011 10–1 |
Méthode :EULER |
|
Nœud \({x}_{3}\) , Accélération (\({\mathit{m.s}}^{-2}\) ) |
3.3749 10–1 |
Modélisation F#
Caractéristiques de la modélisation#
Les caractéristiques de la modélisation F sont identiques à celle de la modélisation A sauf pour la sous-structure 2 où on a remplacé le deuxième élément discret par la relation \(F=-\mathit{kx}\) . Cette modélisation permet de tester l’utilisation de l’option RELA_EFFO_DEPL dans un calcul de type sous-structuration dynamique.

La réponse transitoire du système est calculée en utilisant des interfaces de type “Craig-Bampton” (interfaces bloquées). On applique la méthode d’intégration par différences centrées. Le calcul de la réponse directe (sans sous-structuration) n’est pas repris dans cette modélisation.
Grandeurs testées et résultats#
Identification |
Référence |
Méthode : DIFF_CENTRE |
|
Nœud \({x}_{3}\) , déplacement (\(m\) ) |
4.17 10–1 |
Méthode : DIFF_CENTRE |
|
Nœud \({x}_{3}\) , vitesse (\({\mathrm{m.s}}^{-1}\) ) |
-4.3011 10–1 |
Méthode :DIFF_CENTRE |
|
Nœud \({x}_{3}\) , Accélération (\({\mathrm{m.s}}^{-2}\) ) |
3.3749 10–1 |
Synthèse des résultats#
La précision sur le déplacement, la vitesse et l’accélération du nœud \({x}_{2}\) à l’instant \(t=\mathrm{80 }s\) est excellente (erreur relative \(\text{< 1\%}\) ).
Ce test valide donc les opérateurs de calcul de réponse transitoire linéaire sur base modale calculée par sous-structuration dynamique (avec et sans amortissement), ainsi que le schéma d’intégration à pas de temps adaptatif d’ordre 2 de l’opérateur de calcul transitoire sur base modale.