v2.01.104 SDLD104 - Extrapolation de mesures locales sur un modèle complet (discret)#
Résumé:
Il s’agit d’un test de dynamique linéaire discret.
Le but est de tester la commande PROJ_MESU_MODAL dans le cas d’un système discret. Cette commande permet de projeter des réponses transitoires dynamiques expérimentales en un certain nombre de points sur une base modale d’une modélisation numérique.
Ce test contient 2 modélisations où la projection se fait sur un concept de type [mode_meca], la différence étant donnée par la façon dont ce concept est fabriqué.
Pour les 2 modélisations, les mesures expérimentales fournies sont identiques et permettent de tester la recherche des nœuds en vis-à-vis, la prise en compte d’une orientation locale et le traitement d’un échantillonnage en temps constant ou non, pour des mesures en déplacement.
Dans les deux cas, la solution de référence est déterminée analytiquement (par Maple) ; la projection est réalisée dans la configuration favorable où le nombre de modes est égal au nombre de mesures.
Les réponses en déplacement obtenues après projection sont identiques aux déplacements de référence fournis en données.
Les valeurs des vitesses et des accélérations déduites des déplacements obtenus après projection sont proches de celles obtenues analytiquement. Les faibles écarts constatés sont dus aux erreurs d’approximation engendrées par la détermination via un schéma linéaire en temps des vitesses et accélérations.
Solutions de référence#
Méthode de calcul utilisée pour la solution de référence#
La solution analytique de ce problème est présentée ci-dessous.
Modes et fréquences de vibration:
Le système suivant caractérise la dynamique des masses:
\(\lbrace \begin{array}{}m\ddot{{x}_{1}}+\mathrm{2k}{x}_{1}-k{x}_{2}=0\\ m\ddot{{x}_{2}}+\mathrm{2k}{x}_{2}-k{x}_{1}=0\end{array}\) éq 2.1-1
Ce qui est équivalent au système suivant:
\(\lbrace \begin{array}{}m(\ddot{{x}_{1}}+\ddot{{x}_{2}})+k({x}_{1}+{x}_{2})=0\\ m(\ddot{{x}_{1}}-\ddot{{x}_{2}})+\mathrm{3k}({x}_{1}-{x}_{2})=0\end{array}\) éq 2.1-2
Les 2 fréquences propres du système sont donc données par:
\({\omega}_{1}=\sqrt{\frac{k}{m}}\) et \({\omega}_{2}=\sqrt{\frac{\mathrm{3k}}{m}}\) éq 2.1-3
et les déformations modales associées sont:
\({\Phi}_{1}=(\begin{array}{}1\\ 1\end{array})\) et \({\Phi}_{2}=(\begin{array}{}1\\ -1\end{array})\) éq 2.1-4
Les matrices généralisées sont:
\(\stackrel{ˉ}{M}={\Phi}^{T}M\Phi =(\begin{array}{cc}1& 1\\ 1& -1\end{array})(\begin{array}{cc}m& 0\\ 0& m\end{array})(\begin{array}{cc}1& 1\\ 1& -1\end{array})=(\begin{array}{cc}\mathrm{2m}& 0\\ 0& \mathrm{2m}\end{array})\)
\(\stackrel{ˉ}{K}={\Phi}^{T}K\Phi =(\begin{array}{cc}1& 1\\ 1& -1\end{array})(\begin{array}{cc}\mathrm{2k}& -k\\ -k& \mathrm{2k}\end{array})(\begin{array}{cc}1& 1\\ 1& -1\end{array})=(\begin{array}{cc}\mathrm{2k}& 0\\ 0& \mathrm{6k}\end{array})\) éq 2.1-5
Réponse transitoire:
L’effort sinusoïdal est appliqué sur la première masse: \(F=(\begin{array}{}1\\ 0\end{array})\sin(\omega t)\)
Le système dynamique vérifié est le suivant:
\(M\ddot{X}+KX=F\) éq 2.1-6
En projetant sur la base des modes propres, nous obtenons:
\({\Phi}^{T}M\Phi \ddot{\eta}+{\Phi}^{T}K\Phi \eta ={\Phi}^{T}F\) éq 2.1-7
Soit:
\((\begin{array}{cc}\mathrm{2m}& 0\\ 0& \mathrm{2m}\end{array})(\begin{array}{}\ddot{{\eta}_{1}}\\ \ddot{{\eta}_{2}}\end{array})+(\begin{array}{cc}\mathrm{2k}& 0\\ 0& \mathrm{6k}\end{array})(\begin{array}{}{\eta}_{1}\\ {\eta}_{2}\end{array})=(\begin{array}{cc}1& 1\\ 1& -1\end{array})(\begin{array}{}1\\ 0\end{array})\sin(\omega t)\) éq 2.1-8
Nous aboutissons donc au système découplé suivant:
\(\lbrace \begin{array}{}m\ddot{{\eta}_{1}}+k{\eta}_{1}=\frac{1}{2}\sin(\omega t)\\ m\ddot{{\eta}_{2}}+3k{\eta}_{2}=\frac{1}{2}\sin(\omega t)\end{array}\) éq 2.1-9
La solution de ce système est donnée par:
\(\lbrace \begin{array}{}{\eta}_{1}(t)={A}_{1}\cos({\omega}_{1}t)+{B}_{1}\sin({\omega}_{1}t)+\frac{\sin(\omega t)}{\mathrm{2m}({\omega}_{1}^{2}-{\omega}^{2})}\\ {\eta}_{2}(t)={A}_{2}\cos({\omega}_{2}t)+{B}_{2}\sin({\omega}_{2}t)+\frac{\sin(\omega t)}{\mathrm{2m}({\omega}_{2}^{2}-{\omega}^{2})}\end{array}\) éq 2.1-10
Les déplacements dans l’espace physique sont obtenus par la formule de Ritz:
\(X=(\begin{array}{}{x}_{1}\\ {x}_{2}\end{array})=\Phi \eta =(\begin{array}{cc}1& 1\\ 1& -1\end{array})(\begin{array}{}{\eta}_{1}\\ {\eta}_{2}\end{array})=(\begin{array}{}{\eta}_{1}+{\eta}_{2}\\ {\eta}_{1}-{\eta}_{2}\end{array})\) éq 2.1-11
On en déduit les expressions de \({x}_{1}(t)\) et \({x}_{2}(t)\) :
\(\lbrace \begin{array}{}{x}_{1}(t)={A}_{1}\cos({\omega}_{1}t)+{B}_{1}\sin({\omega}_{1}t)+{A}_{2}\cos({\omega}_{2}t)+{B}_{2}\sin({\omega}_{2}t)+\frac{\sin(\omega t)}{\mathrm{2m}}(\frac{1}{{\omega}_{1}^{2}-{\omega}^{2}}+\frac{1}{{\omega}_{2}^{2}-{\omega}^{2}})\\ {x}_{2}(t)={A}_{1}\cos({\omega}_{1}t)+{B}_{1}\sin({\omega}_{1}t)-{A}_{2}\cos({\omega}_{2}t)+{B}_{2}\sin({\omega}_{2}t)+\frac{\sin(\omega t)}{\mathrm{2m}}(\frac{1}{{\omega}_{1}^{2}-{\omega}^{2}}-\frac{1}{{\omega}_{2}^{2}-{\omega}^{2}})\end{array}\)
éq 2.1-12
A l’instant initial, le système est au repos, d’où les expressions finales de \({x}_{1}(t)\) et \({x}_{2}(t)\) :
\(\lbrace \begin{array}{}{x}_{1}(t)=\frac{1}{\mathrm{2m}}\left[\frac{\sin(\omega t)-\frac{\omega}{{\omega}_{1}}\sin({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}+\frac{\sin(\omega t)-\frac{\omega}{{\omega}_{2}}\sin({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\\ {x}_{2}(t)=\frac{1}{\mathrm{2m}}\left[\frac{\sin(\omega t)-\frac{\omega}{{\omega}_{1}}\sin({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}-\frac{\sin(\omega t)-\frac{\omega}{{\omega}_{2}}\sin({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\end{array}\) éq 2.1-13
Les vitesses des deux masses sont calculées en dérivant les déplacements par rapport au temps:
\(\lbrace \begin{array}{}\dot{{x}_{1}}(t)=\frac{\omega}{\mathrm{2m}}\left[\frac{\cos(\omega t)-\cos({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}+\frac{\cos(\omega t)-\cos({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\\ \dot{{x}_{2}}(t)=\frac{\omega}{\mathrm{2m}}\left[\frac{\cos(\omega t)-\cos({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}-\frac{\cos(\omega t)-\cos({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\end{array}\) éq 2.1-14
Les accélérations des deux masses sont calculées en dérivant les vitesses par rapport au temps:
\(\lbrace \begin{array}{}\ddot{{x}_{1}}(t)=\frac{\omega}{\mathrm{2m}}\left[\frac{\omega \sin(\omega t)-{\omega}_{1}\sin({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}+\frac{\omega \sin(\omega t)-{\omega}_{2}\sin({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\\ \ddot{{x}_{2}}(t)=\frac{\omega}{\mathrm{2m}}\left[\frac{\omega \sin(\omega t)-{\omega}_{1}\sin({\omega}_{1}t)}{{\omega}_{1}^{2}-{\omega}^{2}}-\frac{\omega \sin(\omega t)-{\omega}_{2}\sin({\omega}_{2}t)}{{\omega}_{2}^{2}-{\omega}^{2}}\right]\end{array}\) éq 2.1-15
Résultats de référence#
La comparaison des résultats porte sur les déplacements, vitesses et accélérations suivant l’axe des deux masses, à cinq instants différents.
Incertitude sur la solution#
La solution de référence est exacte.
Le modèle discret représente parfaitement le problème posé (la base modale est complète ; il n’y a donc pas d’approximation liée à une éventuelle troncature modale). Le nombre de modes de la base de projection modale est égal au nombre de mesures, donc la solution de l’inversion est exacte (par opposition à une solution approchée d’un problème inverse généralisé). Si la recherche des nœuds en vis-à-vis est bonne, les déplacements obtenus après projection doivent être en parfaite adéquation avec les valeurs expérimentales. Les vitesses et accélérations sont déterminées par dérivation des contributions modales identifiées via un schéma d’approximation linéaire en temps, pouvant donc générer quelques erreurs.
Modélisation A#
Caractéristiques de la modélisation et des maillages#
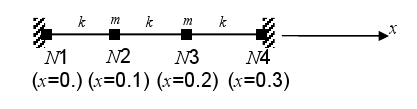
Maillage numérique:
Le maillage numérique est réalisé directement au format ASTER. Il comporte 4 nœuds et 3 mailles discrètes.
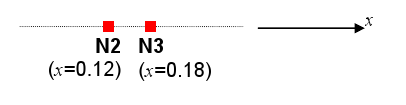
Maillage expérimental :
Le maillage de mesure ne comprend que 2 éléments ponctuels et 2 nœuds :
Caractéristiques des mesures#
Les mesures expérimentales fournies sont:
Au nœud \(\mathrm{N3}\) :
Les données sont les déplacements axiaux, multipliés par \(–1/\sqrt{2}\) , et appliqués dans la direction \(–X\) . L’orientation locale indiquée dans le fichier de commande est \((45.0.0.)\)
L’échantillonnage du temps est constant: le temps initial est \(0s\) , le pas de temps est \({10}^{-3}s\) et le nombre d’instants est 1001 (soit jusqu’à un temps final de \(1s\) ).
Au nœud \(\mathrm{N2}\) :
Les données sont les déplacements axiaux, appliqués dans la direction \(x\) .
L’échantillonnage du temps est variable: tous les instants sont indiqués de \(0s\) à \(1s\) , par pas de \({10}^{-3}s\) (1001 instants au total).
Les valeurs sont issues du calcul analytique réalisé avec Maple.
Caractéristiques de la base modale#
Les deux seuls modes sont stockés dans un concept de type mode_meca créé par la commande CALC_MODES. Leurs fréquences propres sont identiques aux fréquences propres analytiques.
Valeurs testées#
Identification |
Référence |
Code_Aster |
différence |
||
à t = 0.1 s |
1.745 10–4 |
1.745 10–4 |
0.01 % |
||
à t = 0.3 s |
6.797 10–4 |
6.797 10–4 |
0.01 % |
||
DEPL_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
–1.217 10–3 |
–1.217 10–3 |
0.01 % |
(\(m\) ) |
(masse 1) |
à t = 0.7 s |
5.214 10–4 |
5.214 10–4 |
–0.01 % |
à t = 0.9 s |
9.031 10–4 |
9.031 10–4 |
0.00 % |
||
à t = 0.1 s |
9.154 10–6 |
9.154 10–6 |
0.00 % |
||
à t = 0.3 s |
6.414 10–4 |
6.414 10–4 |
0.00 % |
||
DEPL_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
–8.636 10–4 |
–8.636 10–4 |
0.00 % |
(\(m\) ) |
(masse 2) |
à t = 0.7 s |
–1.107 10–4 |
–1.107 10–4 |
0.03 % |
à t = 0.9 s |
1.633 10–3 |
1.633 10–3 |
0.02 % |
||
à t = 0.1 s |
4.586 10–3 |
4.616 10–3 |
0.65 % |
||
à t = 0.3 s |
–7.598 10–3 |
–7.663 10–3 |
0.85 % |
||
VITE_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
–1.581 10–4 |
–8.000 10–5 |
7.81 10–5m/s |
(\(m/s\) ) |
(masse 1) |
à t = 0.7 s |
9.382 10–3 |
9.354 10–3 |
–0.30 % |
à t = 0.9 s |
–7.481 10–3 |
–7.537 10–3 |
0.75 % |
||
à t = 0.1 s |
4.328 10–4 |
4.405 10–4 |
1.79 % |
||
à t = 0.3 s |
3.671 10–3 |
3.640 10–3 |
–0.84 % |
||
VITE_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
–1.539 10–2 |
–1.536 10–2 |
–0.20 % |
(\(m/s\) ) |
(masse 2) |
à t = 0.7 s |
2.453 10–2 |
2.457 10–2 |
0.15 % |
à t = 0.9 s |
–1.899 10–2 |
–1.912 10–2 |
0.68 % |
||
à t = 0.1 s |
6.112 10–2 |
6.100 10–2 |
–0.20 % |
||
à t = 0.3 s |
–1.306 10–1 |
–1.300 10–1 |
–0.46 % |
||
ACCE_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
1.571 10–1 |
1.600 10–1 |
1.85 % |
(\(m/{s}^{2}\) ) |
(masse 1) |
à t = 0.7 s |
–5.657 10–2 |
–5.800 10–2 |
2.53 % |
à t = 0.9 s |
–1.124 10–1 |
–1.130 10–1 |
0.53 % |
||
à t = 0.1 s |
1.562 10–2 |
1.618 10–2 |
3.58 % |
||
à t = 0.3 s |
–6.031 10–2 |
–6.223 10–2 |
3.18 % |
||
ACCE_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
5.102 10–2 |
5.374 10–2 |
5.33 % |
(\(m/{s}^{2}\) ) |
(masse 2) |
à t = 0.7 s |
7.428 10–2 |
7.043 10–2 |
–5.19 % |
à t = 0.9 s |
–2.364 10–1 |
–2.263 10–1 |
–4.28 % |
||
Remarque:
La vitesse au nœud \(\mathrm{N2}\) à l’instant \(t=0.5s\) étant relativement proche de zéro, la comparaison est réalisée pour ce cas en valeur absolue.
Modélisation B#
Caractéristiques de la modélisation et des maillages#
Maillage numérique:
Le maillage numérique est réalisé directement au format ASTER. Il comporte 4 nœuds et 3 mailles discrètes.
Maillage expérimental :
Le maillage de mesure ne comprend que 2 éléments ponctuels et 2 nœuds :
Caractéristique des mesures#
Les mesures expérimentales fournies sont:
Au nœud \(\mathrm{N3}\) :
Les données sont les déplacements axiaux, multipliés par \(–1/\sqrt{2}\) , et appliqués dans la direction \(-x\) . L’orientation locale indiquée dans le fichier de commande est \((45.0.0.)\)
L’échantillonnage du temps est constant: le temps initial est \(0s\) , le pas de temps est \({10}^{-3}s\) et le nombre d’instants est 1001 (i.e. jusqu’à un temps final de \(1s\) ).
Au nœud \(\mathrm{N2}\) :
Les données sont les déplacements axiaux, appliqués dans la direction \(X\) .
L’échantillonnage du temps est variable: tous les instants sont indiqués de \(0s\) à \(1s\) , par pas de \({10}^{-3}s\) (1001 instants au total).
Les valeurs sont issues du calcul analytique réalisé avec Maple.
Caractéristiques de la base modale#
Les deux seuls modes sont stockés dans un concept de type mode_meca, créé par la commande DEFI_BASE_MODALE. L’interface, de type Craig-Bampton, est placée sur le degré de liberté en déplacement suivant \(x\) du nœud \(\mathrm{N2}\) (correspondant à la masse \(\mathrm{m1}\) ). La base modale contient donc un mode dynamique (avec \(\mathrm{N2}\) bloqué) et un mode statique.
Valeurs testées#
Identification |
Référence |
Code_Aster |
différence |
||
à t = 0.1 s |
1.745 10–4 |
1.745 10–4 |
0.01 % |
||
à t = 0.3 s |
6.797 10–4 |
6.797 10–4 |
0.01 % |
||
DEPL_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
–1.217 10–3 |
–1.217 10–3 |
0.01 % |
(\(m\) ) |
(masse 1) |
à t = 0.7 s |
5.214 10–4 |
5.214 10–4 |
–0.01 % |
à t = 0.9 s |
9.031 10–4 |
9.031 10–4 |
0.00 % |
||
à t = 0.1 s |
9.154 10–6 |
9.154 10–6 |
0.00 % |
||
à t = 0.3 s |
6.414 10–4 |
6.414 10–4 |
0.00 % |
||
DEPL_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
–8.636 10–4 |
–8.636 10–4 |
0.00 % |
(\(m\) ) |
(masse 2) |
à t = 0.7 s |
–1.107 10–4 |
–1.107 10–4 |
0.03 % |
à t = 0.9 s |
1.633 10–3 |
1.633 10–3 |
0.02 % |
||
à t = 0.1 s |
4.586 10–3 |
4.616 10–3 |
0.65 % |
||
à t = 0.3 s |
–7.598 10–3 |
–7.663 10–3 |
0.85 % |
||
VITE_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
–1.581 10–4 |
–8.000 10–5 |
7.81 10–5m/s |
(\(m/s\) ) |
(masse 1) |
à t = 0.7 s |
9.382 10–3 |
9.354 10–3 |
–0.30 % |
à t = 0.9 s |
–7.481 10–3 |
–7.537 10–3 |
0.75 % |
||
à t = 0.1 s |
4.328 10–4 |
4.405 10–4 |
1.79 % |
||
à t = 0.3 s |
3.671 10–3 |
3.640 10–3 |
–0.84 % |
||
VITE_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
–1.539 10–2 |
–1.536 10–2 |
–0.20 % |
(\(m/s\) ) |
(masse 2) |
à t = 0.7 s |
2.453 10–2 |
2.457 10–2 |
0.15 % |
à t = 0.9 s |
–1.899 10–2 |
–1.912 10–2 |
0.68 % |
||
à t = 0.1 s |
6.112 10–2 |
6.100 10–2 |
–0.20 % |
||
à t = 0.3 s |
–1.306 10–1 |
–1.300 10–1 |
–0.46 % |
||
ACCE_X |
au nœud \(\mathrm{N2}\) |
à t = 0.5 s |
1.571 10–1 |
1.600 10–1 |
1.85 % |
(\(m/{s}^{2}\) ) |
(masse 1) |
à t = 0.7 s |
–5.657 10–2 |
–5.800 10–2 |
2.53 % |
à t = 0.9 s |
–1.124 10–1 |
–1.130 10–1 |
0.53 % |
||
à t = 0.1 s |
1.562 10–2 |
1.618 10–2 |
3.58 % |
||
à t = 0.3 s |
–6.031 10–2 |
–6.223 10–2 |
3.18 % |
||
ACCE_X |
au nœud \(\mathrm{N3}\) |
à t = 0.5 s |
5.102 10–2 |
5.374 10–2 |
5.33 % |
(\(m/{s}^{2}\) ) |
(masse 2) |
à t = 0.7 s |
7.428 10–2 |
7.043 10–2 |
–5.19 % |
à t = 0.9 s |
–2.364 10–1 |
–2.263 10–1 |
–4.28 % |
||
Remarque:
La vitesse au nœud \(\mathrm{N2}\) à l’instant \(t=0.5s\) étant relativement proche de zéro, la comparaison est réalisée pour ce cas en valeur absolue.
Synthèse des résultats#
Pour les deux modélisations, les réponses en déplacement obtenues après projection sont identiques aux déplacements de référence calculés analytiquement avec Maple et fournis en données.
Les valeurs des vitesses et des accélérations déduites des déplacements obtenus après projection sont proches de celles obtenues analytiquement. Les faibles écarts constatés sont dus aux erreurs d’approximation engendrées par la détermination par un schéma linéaire en temps des vitesses et accélérations.