u2.03.08 Réalisation d’une étude de génie civil avec des câbles de précontrainte en dynamique rapide via la macro commande CALC_EUROPLEXUS#
Résumé:
Ce document a pour but de donner des conseils pour réaliser des études de génie civil en dynamique rapide avec des câbles de précontrainte et le béton modélisé en coque (élément Q4GG). Les calculs en dynamique rapide sont réalisés avec Europlexus via la macro-commande CALC_EUROPLEXUS. Les câbles de précontraintes peuvent être de trois types : adhérents, glissants ou frottants.
On rappelle les trois types de modélisation de câbles disponibles dans Europlexus et on illustre leur utilisation sur l’exemple d’une enceinte précontrainte soumise à un impact. On présentera les quatre étapes pour la résolution du problème: création du maillage, mise en donnée dans Code_Aster , résolution du problème numérique et post-traitement.
Logiciel EUROPLEXUS#
Le logiciel Europlexus [1] est un logiciel de simulation dédié à l’analyse en dynamique rapide de structures et de fluides. EDFco-développece code en partenariat avec les propriétaires: le Commissariat à l’Énergie atomique et aux Énergies Alternatives (CEA) et le Centre Commun de Recherchesde la Commission Européenne situé à Ispra (Italie).
Le logiciel Europlexus est basé sur une discrétisation de l’espace au moyen d’éléments finis. L’intégration temporelle est réalisée grâce à un schéma explicite conditionnellement stable. L’algorithme de résolution est non-linéaire tant au niveau géométrique (grands déplacements, grandesdéformations) qu’au niveau du matériau (lois de comportement non-linéaires).
Le code Europlexus peut être appelé par le logiciel Code_Aster via la macro-commande CALC_EUROPLEXUS, qui permet de piloter l’exécution d’une étude Europlexus depuis un fichier de commandes Code_Aster . La commande CALC_EUROPLEXUS permet ainsi de définir et d’exécuter une étude Europlexus en restant entièrement dans l’environnement de Code_Aster . La résolution se fait en arrière-plan par Europlexus , sans que l’utilisateur n’ait à se soucier de préparation des fichiers d’entrée Europlexus .
CALC_EUROPLEXUS prend en arguments les concepts Aster, construit le fichier de commande Europlexus , lance et pilote l’exécution de Europlexus , puis reconstruit, à partir d’un fichier résultat Europlexus au format MED, un concept résultat Aster qui peut être ensuite analysé avec Aster en post-traitement.
Le cadre d’application de la commande CALC_EUROPLEXUS est détaillé dans la documentation [U7.03.10].
Type de modélisation des câbles de précontraintes#
Introduction#
Dans Code_Aster et Europlexus , les câbles de précontrainte sont modélisés par des éléments 1D (barre à 2 nœuds). Dans Code_Aster , il existe également un élément CABLE-GAINE utilisant 3 nœuds. Leur mise en tension consiste à appliquer une tension non nulle dans ces câbles.
On distingue trois modélisations de câbles [5] et [6]:
câbles adhérents,
câbles glissants,
câbles frottants.
La différence entre ces trois types de câbles repose sur leur liaison avec le béton qui les entoure (voir [2] pour les aspects théoriques et la validation).
Câbles Adhérents#
Un câble adhérent est un câble entièrement lié au béton par des liaisons cinématiques. L’ensemble des déplacements des nœuds des câbles sont donc contraints par les déplacements des nœuds du béton.
Cette modélisation correspond à la technologie de la précontrainte avec adhérence. Dans ce cas, les câbles ou torons sont placés dans des gaines métalliques ou plastique, sont mis en tension, puis les gaines sont injectées avec du coulis de ciment de façon à assurer la solidarisation entre les câbles et le béton.
Câbles Glissants#
Un câble glissant est un câble qui peut se déplacer librement le long de sa trajectoire (et uniquement dans cette direction) par rapport au béton dans lequel il est immergé. Un câble glissant n’est donc cinématiquement lié au béton que selon les deux directions orthogonales à sa trajectoire en chacun de ses nœuds.
Pour que le câble se déplace le long de sa trajectoire en cas de grandes déformations et de grands glissements, ces relations cinématiques doivent être recalculées à chaque pas de temps. Il faut à la fois recalculer la projection des nœuds de câbles sur le béton et la trajectoire du câble afin d’obtenir la nouvelle tangente. La illustre cette procédure.
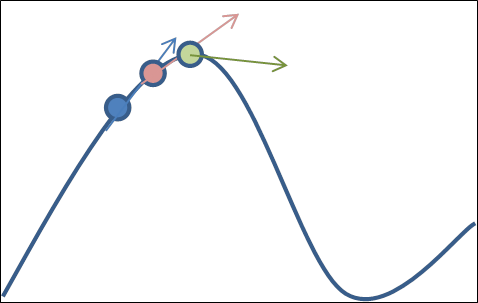
Figure 3.3-a : Glissement du câble le long de sa gaine
Cette modélisation correspond à la technologie de la précontrainte sans adhérence : c’est le cas par exemple des câbles gainés graissés (TGG). Dans ces cas, les câbles ou torons sont placés dans des gaines remplies de graisse.
Câbles Frottants#
Un câble frottant est un cas intermédiaire entre un câble adhérent et un câble glissant. Les nœuds du câble peuvent se déplacer par rapport au béton dans lequel il est immergé suivant une loi de frottement dans la direction de la trajectoire du câble. La loi de frottement utilisé dans Code-Aster et Europlexus est une loi de Coulomb où un seuil de frottement sépare la zone d’adhérence et la zone de glissement (). Le seuil de la loi est défini par les coefficients de frottement linéaire (rectiligne) et courbe (curviligne) (cf 4.2.4 ).
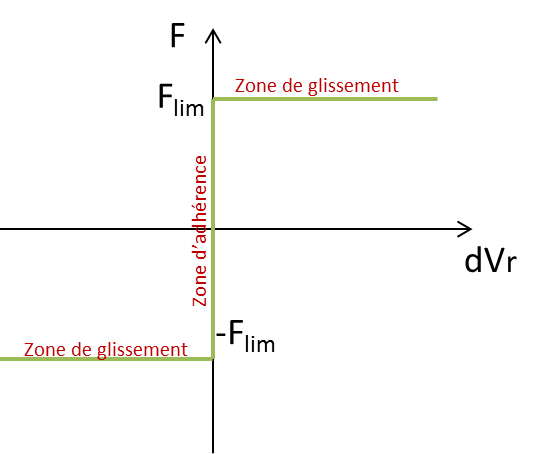
Figure 3.4-a : Modèle de frottement
Sur cette figure Flimdésigne la force seuil de la loi et dVr est la vitesse relative des câbles par rapport au béton.
Cette modélisation peut être utilisée pour reproduire les profils de tension des normes BPEL [3] ou ETCC [4]. D’un point de vue pratique, des éléments de type ressort frottants, appelés éléments discrets dans Code_Aster , doivent être définis dans le modèle pour prendre en compte la loi de comportement de frottement reliant les nœuds du câble et les nœuds du béton ().
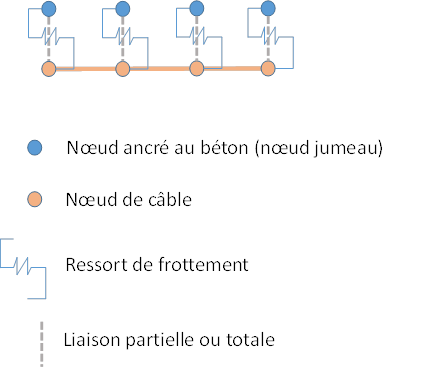
Figure 3.4-b : Modélisation des liaisons frottantes béton-acier
Étude type d’une enceinte précontrainte#
Première étape : Réalisation du maillage#
Structure en béton#
L’enceinte modélisée pour l’étude type est constituée d’un fût cylindrique surmonté d’un dôme. La paroi de béton armé est maillée en éléments surfaciques à 4 nœuds (QUA4). Les armatures passives sont modélisées via la loi de comportement homogénéisée béton armé GLRC_DAMAGE, elles ne sont donc pas maillées. On peut définir une zone limitée pour la prise en compte du comportement non-linéaire du matériau.
Les nervures, situées de part de d’autre de l’enceinte pour \(\theta =0°\) et \(\theta =180°\) , sont des zones renforcées où sont ancré les câbles de précontraintes horizontaux. Elles sont modélisées par des éléments coques () représentant les super épaisseurs de béton.
Les groupes de mailles permettant l’affectation des matériaux et du chargement sont définis.
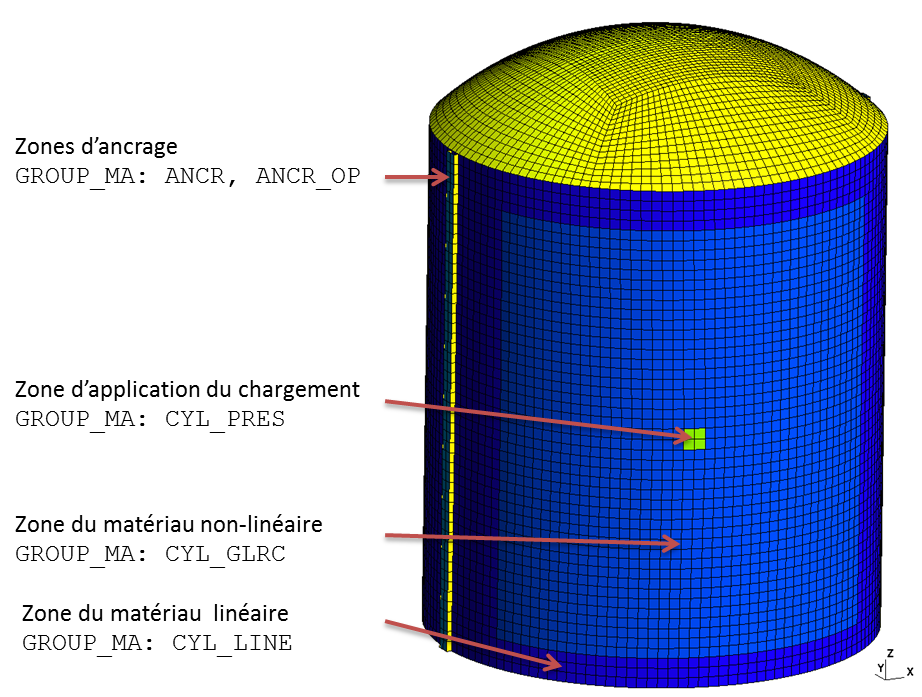
Figure 4.1.1-a: Maillage de la structure en béton de l’enceinte
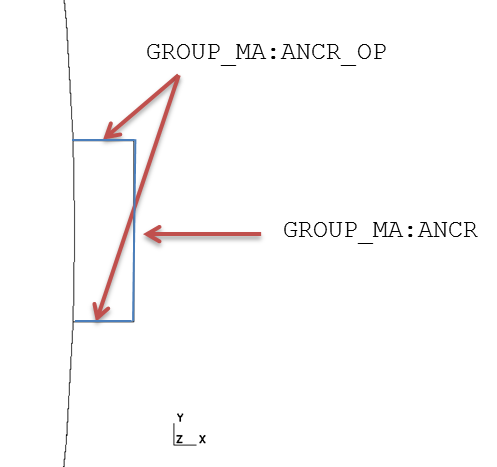
Figure 4.1.1-b: Vue rapprochée de l’ancrage \(\theta =0°\) |
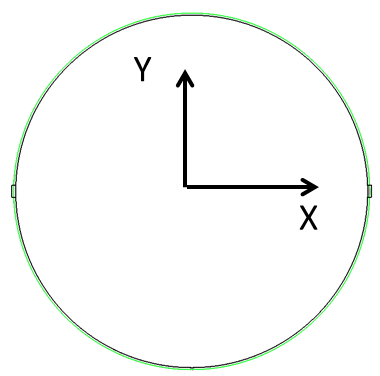
Figure 4.1.1-c : Vue du cylindre de l’enceinte et du repère |
Remarque
On s’attachera à réaliser un maillage régulier avec une taille de maille uniforme.
La taille minimale de la maille est prise en compte dans le calcul du pas de temps pour le schéma de résolution explicite. La stabilité du schéma est donc conditionnée par le maillage.
En outre, dans le cas de l’utilisation d’une loi de comportement non-linéaire, la présence de raffinements locaux peut conduire à une localisation des contraintes et endommagements non réalistes.
Câbles de précontraintes#
Chaque câble est maillé par des éléments segments à deux nœuds. Le choix de la taille de maille doit être proche de la taille de maille choisie pour les éléments plaques. On s’assure ainsi qu’il n’y a pas un grand nombre de nœud de câbles dans un même maille de béton ce qui conduirait à un modèle avec de nombreuses liaisons cinématiques conduisant à un temps de calcul important. Inversement si les câbles de précontrainte ne sont pas maillés assez finement, les efforts de précontrainte sont mal répartis et certains segments de câble peuvent «sortir» du maillage du béton lors du chargement.
Il n’est pas nécessaire de faire coïncider les nœuds du câble avec les nœuds du béton. Le segment des câbles n’est pas nécessairement dans le plan de la coque modélisant le béton car l’épaisseur de la coque sera prise en compte dans l’appariement des nœuds des câbles et du béton. Il faut donc s’assurer que la position des nœuds du câble est bien à une distance inférieure à la demi-épaisseur de la plaque de béton correspondante.
Pour chaque câble, il faut définir les nœuds d’ancrage, qui sont les deux extrémités du câble. Il faut créer un groupe de nœuds (contenant un seul nœud) pour chacun de ces nœuds d’ancrage.
Dans cette étude, on distingue trois groupes de câbles: câbles verticaux, horizontaux et ceux du dôme. Pour les câbles verticaux et ceux du dôme, on peut repérer facilement les extrémités sur la figure. Pour les câbles horizontaux, une vue rapprochée de l’ancrage aux extrémités est proposée : les deux terminaisons des câbles se croisent mais sont déconnectées. Les câbles horizontaux peuvent être ancrés sur une des deux zones d’ancrages. Il est conseillé d’alterner les câbles horizontaux ancrés dans les zones \(\theta =0°\) et \(\theta =180°\) , afin d’obtenir une précontrainte uniforme de l’enceinte. Ce conseil est particulièrement nécessaire dans le cas où le frottement est considéré lors de la mise en précontrainte car la tension n’est pas uniforme le long du câble lors de la mise en précontrainte.
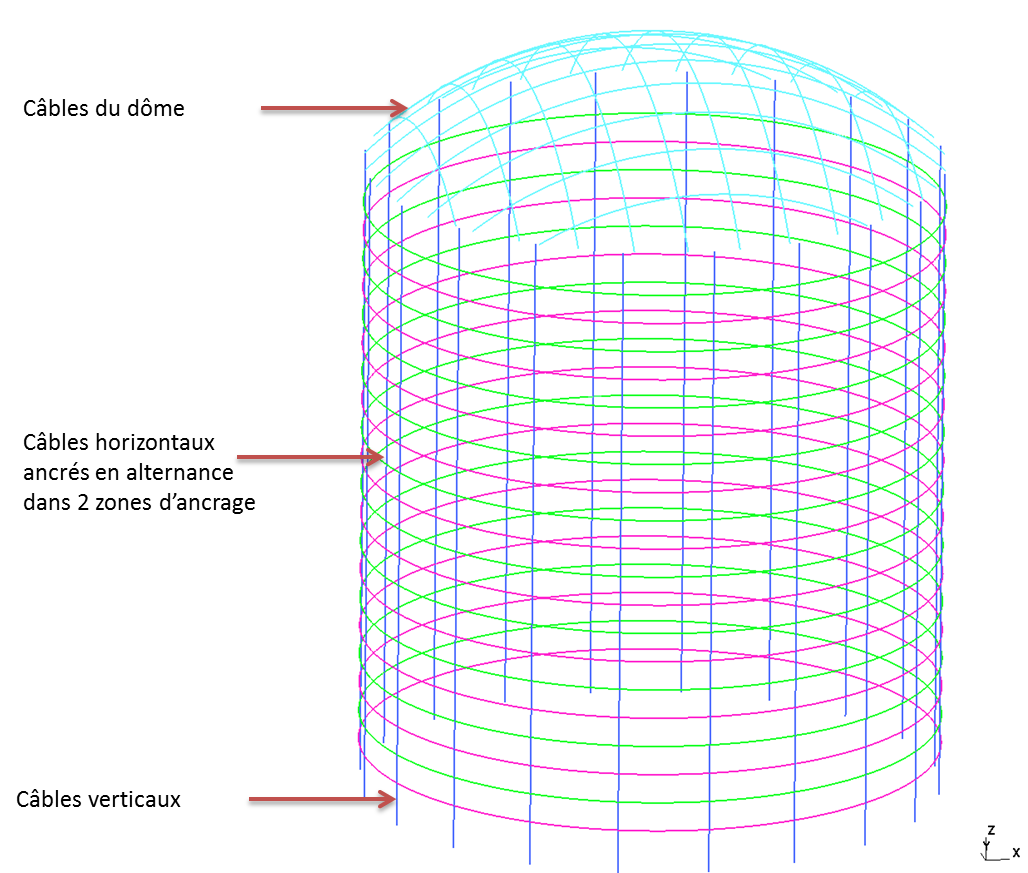
Figure 4.1.2-a : Maillage des câbles de précontrainte
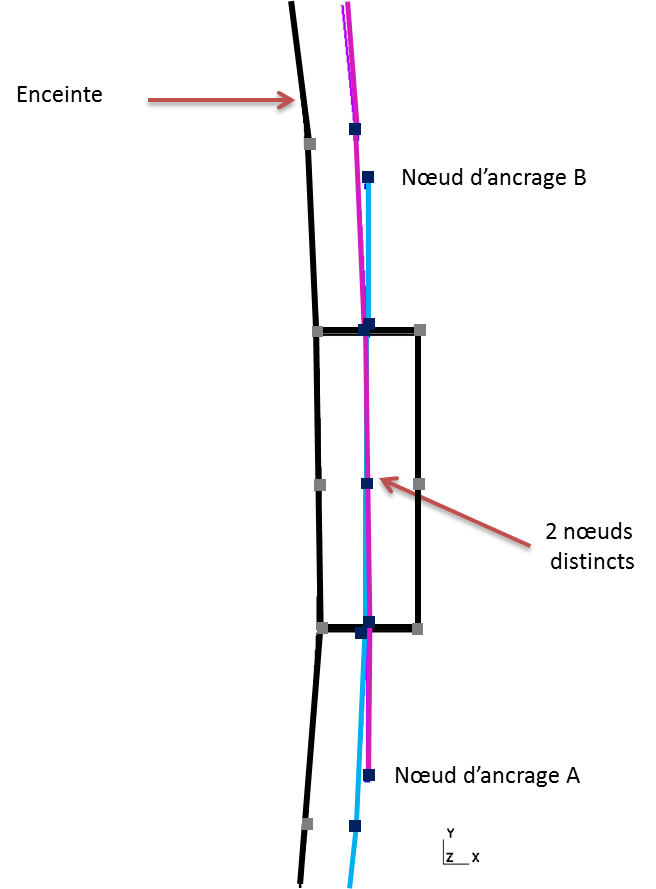
Figure 4.1.2-b : Vue rapprochée de l’ancrage des câbles horizontaux
Cas spécifique des câbles frottants
Pour le cas des câbles frottants, des éléments discrets doivent être construits dans le maillage tout le long des câbles. Pour cela, on dédouble chaque nœud de câble dans le script Salomé de génération du maillage, hormis les extrémités, et on crée une maille SEG2 de longueur nulle . On peut créer un unique groupe de maille DISFROT regroupant tous les éléments discrets créés.
Deuxième étape: Mise en donnée du problème#
Lecture et enrichissements du maillage#
On doit vérifier préalablement que les nœuds d’ancrage sont bien accessibles (individuellement) par un GROUP_NO.
Il faut également orienter correctement les groupes de mailles où l’on impose des chargements de type pression ou flux (commande ORIE_NORM_COQUE).
Cas spécifique des câbles frottants
On doit s’assurer avoir construit un groupe de mailles discrètes le long des câbles sans inclure les extrémités.
Affectation d’un modèle#
Les composants modélisés sont:
les câbles de précontrainte modélisés par des éléments BARRE(s’appuyant sur des SEG2),
le béton modélisé par des coques Q4GG(il s’agit des seuls éléments coques admis par la macro_commande CALC_EUROPLEXUS).
Cas spécifique des câbles frottants
Les éléments discrets représentant le frottement entre les câbles et le béton sont modélisés par des éléments DIS_T.
MODELE=AFFE_MODELE( MAILLAGE=MAIL, AFFE=(_F( GROUP_MA = l_beton, PHENOMENE = “MECANIQUE”, MODELISATION = “Q4GG”), _F( GROUP_MA = l_cables, PHENOMENE = “MECANIQUE”, MODELISATION = “BARRE”), _F( GROUP_MA = “DISFROT”, PHENOMENE = “MECANIQUE”, MODELISATION = “DIS_T”),) ) |
← Modélisation à ajouter pour le cas des câbles frottants |
Caractéristiques des éléments de structure#
Les caractéristiques attendues pour les éléments de structure sont :
la section des câbles de précontraintes,
l’épaisseur des coques de béton (si besoin, l’orientation des coques est précisée).
Cas spécifique des câbles frottants
Les raideurs élémentaires des discrets doivent être définies. Ces raideurs sont nécessaires pour le calcul de mise en précontrainte effectué dans Code_Aster . On choisit des valeurs de raideurs élevées afin que les nœuds «doubles» restent solidaires aux nœuds du câble. Cependant ces raideurs ne sont pas utiles pour la partie Europlexus . On crée un second concept AFFE_CARA_ELEM sans les caractéristiques des éléments discrets.
Le concept CARA_ELEM pour la commande CALC_PRECONT est:
CARAELE=AFFE_CARA_ELEM(MODELE=MODELE, COQUE =(_F( GROUP_MA = l_beton, EPAIS = ECYL, VECTEUR=(0.,0.,1.),) …) BARRE = (_F(GROUP_MA = l_cables, SECTION=”GENERALE”, CARA=”A”, VALE=aire,),…) DISCRET = _F(GROUP_MA = “DISFROT”, CARA = “K_T_D_L”, VALE = (1.E10,1.E10,1.E10), ), |
← Mot-clé à ajouter pour le cas des câbles frottants |
Le concept CARA_ELEM pour la commande CALC_EUROPLEXUS est:
CARAEPX=AFFE_CARA_ELEM(MODELE=MODELE, COQUE=(_F( GROUP_MA = l_beton, EPAIS = ECYL, VECTEUR=(0.,0.,1.),) …) BARRE=(_F( GROUP_MA = l_cables, SECTION=”GENERALE”, CARA=”A”, VALE=aire,), …) ), |
Concept copie à créer pour le cas des câbles frottants sans les caractéristiques des discrets |
Définition des matériaux#
Les lois de comportement disponibles pour le béton dans le cadre de cette modélisation sont:
ELAS
GLRC_DAMAGE
La loi de comportement GLRC_DAMAGE est une loi d’endommagement homogénéisée dont les paramètres dépendent de la géométrie de la section (épaisseur et section d’armatures passives), des paramètres de la réponse du béton et de l’acier. Le champ matériau est créé grâce à la commande DEFI_GLRC.
Pour le béton et l’acier, on doit créer au préalable les matériaux avec les paramètres élastiques (E, NU et RHO) et les paramètres d’endommagement (SYC, SYT, D_SIGM_EPSI).
Pour la prise en compte des câbles de précontrainte, il faut ajouter le mot-clé BETON_BPEL pour le béton.
BETON = DEFI_MATERIAU( ELAS=_F(E = e_b, NU = nu_b, RHO = rho,), BETON_ECRO_LINE=_F( D_SIGM_EPSI=d_sigm_epsi, SYT=syt, SYC=syc,), BPEL_BETON=_F() ); |
← Mot-clé à ajouter |
Si l’on souhaite prendre en compte le frottement lors de la mise en précontrainte (ce qui peut être fait pour tous les types de câbles), il faut ajouter les paramètres de frottements dans le mot-clé BPEL_ACIER. Les mots-clés sont dans ce cas FROT_COURB( coefficient de frottement courbe ) et FROT_LINE( coefficient de frottement linéaire).
ACIER = DEFI_MATERIAU( ELAS=_F(E = e_a, NU = nu_a, RHO = rho,), ECRO_LINE=_F( D_SIGM_EPSI=d_sigm_epsi, SYT=syt, SYC=syc,), BPEL_ACIER=_F( FROT_COURB= frot_cb, FROT_LINE = frot_li, ) ); |
← Mots-clés à ajouter avec les paramètres de frottement (obligatoire dans le cas des câbles frottants, optionnel pour les autres câbles) |
Les champs matériaux sont associés au maillage via la commande AFFE_MATERIAU.
Remarque
Le champ de matériau créé est affecté sur le maillage. Pour la commande CALC_EUROPLEXUS tous les groupes de mailles du modèle doivent être associées à un matériau.
Définition des câbles#
La phase de définition des câbles passe par la commande DEFI_CABLE_BP. Cela permet de définir quelle doit être la tension dans les câbles selon les règles du BPEL, en fonction de la tension initiale, du recul d’ancrage (qui s’applique uniquement pour les ancrages actifs), de la relaxation de l’acier et des déformations différées du béton (fluage et retrait).
Signalons qu’un seul DEFI_CABLE_BP peut regrouper plusieurs câbles à condition qu’ils aient les mêmes paramètres d’entrée pour le calcul de la tension, et que l’on souhaite tendre tous ces câbles simultanément.
Dans la commande DEFI_CABLE_BP, on indique également les mailles de béton environnantes des câbles pour l’appariement.
L_CAB =DEFI_CABLE_BP(MODELE = MODELE, CHAM_MATER = CHMATER, CARA_ELEM = CARAELE, GROUP_MA_BETON = l_beton, TYPE_ANCRAGE = (“ACTIF”,”ACTIF”), TENSION_INIT = tension_val, RECUL_ANCRAGE = recul, DEFI_CABLE = (_F(GROUP_MA = cable_1, GROUP_NO_ANCRAGE=(n1_debut,n1_fin)), _F(GROUP_MA = cable_2, GROUP_NO_ANCRAGE=(n2_debut,n2_fin)), …)) |
← Une occurrence par câble |
Définition des chargements#
Il est nécessaire de définir séparément les chargements suivants:
les conditions aux limites ainsi que les éventuels chargements instantanés, comme le poids propre, valables dès le début du calcul,
les relations cinématiques permettant de relier les nœuds de câble aux nœuds de béton et de spécifier le type de câble qui sera pris en compte par Europlexus .
Le type de câble est sélectionné sous TYPE_EPX avec pour choix: “ADHE”, “GLIS”, “FROT”.
CINE_CAB = AFFE_CHAR_MECA(MODELE=MODELE, RELA_CINE_BP=_F( CABLE_BP =L_CAB, RELA_CINE=’OUI’, SIGM_BPEL=”NON”, TYPE_EPX = type_epx)) |
← Mot clé à ajouter pour spécifier le type de câble |
Ce chargement est nécessaire pour tout calcul avec STAT_NON_LINE ou CALC_EUROPLEXUS sur le modèle contenant les câbles de précontrainte (sinon erreur fatale pour cause de matrice non factorisable).
Pendant l’appel à CALC_PRECONT, les liaisons cinématiques ne doivent pas être inclues dans les chargements sauf lorsque l’on effectue la mise en tension en plusieurs étapes.
les chargements postérieurs à la mise en tension des câbles, tels que les efforts de pression modélisant l’impact..
Troisième étape : Résolution du problème numérique#
Mise en tension des câbles#
Les profils de tension initiaux des câbles sont définis par la macro-commande DEFI_CABLE_BP décrite précédemment. La mise en tension effective des câbles est réalisée à l’aide de la macro-commande CALC_PRECONT.
RES1 = CALC_PRECONT( MODELE=MODELE, CHAM_MATER=CHMATER, CARA_ELEM=CARAELE, COMPORTEMENT=(_F( RELATION = “ELAS”, GROUP_MA=l_beton,), _F( RELATION = “ELAS”, GROUP_MA =l_cable,), _F( RELATION = “ELAS”, GROUP_MA =”DISFROT”,) ), EXCIT = _F(CHARGE=CHARBLOQ), CABLE_BP =(L_CAB,…), INCREMENT=_F(LIST_INST = LINST, INST_INIT = 0.0, INST_FIN = 1.0, ),); |
← On spécifie une loi ELAS pour les discrets des câbles frottants ← Le chargement contient les conditions aux limites hormis CINE_CAB |
Dans le cas présenté, on met en tension simultanément tous les câbles de précontrainte ainsi qu’un chargement instantané, sans autres chargements au préalable. Dans ce cas, il suffit de faire appel une seule fois à la macro-commande CALC_PRECONT. Le chargement est composé des conditions aux limites et des éventuels chargements instantanés. Le chargement CINE_CABne doit pas être inclus dans les chargements.Sous le mot-clé CABLE_BP, on inclura tous les concepts DEFI_CABLE_BP.
On se référera à la documentation [U2.03.06] [6] pour la méthodologie sur l’application de la précontrainte en plusieurs étapes.
Résolution dans le logiciel Europlexus#
Les éléments suivants doivent être fournis à la macro-commande CALC_EUROPLEXUS:
L’état initial issu du calcul de la mise sous précontrainte CALC_PRECONT
CALC_EUROPLEXUS(… ETAT_INIT = _F(RESULTAT=RES1, 1. * * * CONTRAINTE=”OUI”, EQUILIBRE=”OUI” ou “NON”), …) |
Ce mot-clé permet à Europlexus de débuter le calcul à partir d’un état initial issu d’un concept résultat de Code_Aster . Les champs fournis à Europlexus sont ceux correspondant au dernier instant de calcul du concept résultat donné. Le mot clé EQUILIBRE permet de indiquer à Europlexus si l’état initial est en équilibre ou non. Si le mot clé est “NON”, le calcul Europlexus va lui-même vérifier que le système est en équilibre.
Les chargements mécaniques
On vérifiera que le chargement correspondant aux liaisons cinématiques entre câbles et béton est bien spécifié.
CALC_EUROPLEXUS(… EXCIT =( _F(CHARGE = CINE_CAB), ….) * * * …) |
← Chargement correspond à la définition des liaisons cinématiques entre câbles et béton |
Cas spécifique des câbles frottants
Pour les cas des câbles frottants, on doit définirle concept CARA_ELEM spécifique à Europlexus , qui ne contient pas les caractéristiques des discrets.
CALC_EUROPLEXUS(… CARA_ELEM = CARAEPX, * * * …) |
← Le concept cara_elem n’est pas identique à celui utilisé par CALC_PRECONT |
Le comportement des différents composants du modèle doit être spécifié
Pour le cas des câbles frottants, la loi de comportement associé aux éléments discrets est BPEL_FROT.
CALC_EUROPLEXUS(… COMPORTEMENT=(COMPORTEMENT=( _F( RELATION = “GLRC_DAMAGE”, GROUP_MA=l_beton,), _F( RELATION = “ELAS”, GROUP_MA =l_cables,), _F(RELATION = “BPEL_FROT”, GROUP_MA = “DISFROT”,),), ), …) |
1. 2. 3. 4. 5. ← Loi de comportement à spécifier pour les discrets |
Les autres mots-clés obligatoires de la macro-commande CALC_EUROPLEXUS sont CALCUL et ARCHIVAGE.
Finalement le mot clé LANCEMENT =”OUI” permet de lancer le calcul.
Limites d’utilisation#
Pour les câbles glissants et frottants, à chaque pas de temps, on permet aux nœuds de câble de se déplacer selon la tangente à la trajectoire du câble à l’instant donné. Or la tangente est une approximation de la trajectoire du câble au nœud considéré. Ainsi quand le nœud de câble glisse, il s’écarte d’une petite distance de la trajectoire et toujours vers l’extérieur de celle-ci. A chaque pas de temps cet écart est d’autant plus grand que le déplacement est grand. Avec la répétition des pas de temps, les nœuds peuvent finir par s’écarter de manière non négligeable de la trajectoire théorique du câble.
Dans ces cas, le calcul s’arrêtera avec un message indiquant qu’un nœud de câble est sorti de l’épaisseur de la maille de béton dans laquelle il devrait être inclus. Dans ce cas, on peut utiliser un pas de temps plus petit pour remédier au problème.
Quatrième étape: Post-Traitements#
Une fois le calcul exécuté par Europlexus, les résultats sont stockés dans le concept evol_noli rendu par la macro_commande CALC_EUROPLEXUS. Les posts-traitements peuvent être effectués de façon classique à partir de ce concept. La macro-commande CALC_EUROPLEXUS offre aussi la possibilité à partir des mots-clés OBSERVATION ou COURBE de construire une table avec les données d’intérêt pour le post-traitement.
On illustre pour l’étude considérée certains post-traitements pouvant être réalisés. Par la suite, on considère trois configurations différentes avec une modélisation des câbles adhérents, glissants et frottants.
Étude illustrative de génie civil#
Pour illustrer l’utilisation des câbles on considère ici l’étude d’une enceinte précontrainte soumise à un impact. Le maillage de la structure est présentée sur la.
Matériaux
Le comportement du béton armé est modélisé par la loi homogénéisée GLRC_DAMAGE. Dans la zone entourant la zone d’impact, le matériau est supposé se comporter de manière non-linéaire. On affecte donc à un groupe de maillesCYL_GLRCde cette zone les paramètres de la loi de comportement béton calculés à l’aide du logiciel MOCO [7].Pour plus de détails techniques sur la mise en données d’un calcul d’impact avec la loi GLRC_DAMAGE, on peut consulter la référence [8].
Les propriétés des matériaux sont présentés dans . La zone CYL_LINE utilise également la loi de comportement CYL_DAMAGE mais dans ce cas les limites en traction et compression du béton et des armatures ont été relevés de manière à modéliser un comportement linéaire homogénéisé. On suppose que l’impact n’endommagera pas cette zone.
Béton |
Armatures |
Câbles de précontraintes |
|
Module de Young (GPa) |
40 |
200 |
200 |
Coefficient de Poisson |
0.2 |
||
Limite en traction (MPa) |
4 |
500 |
|
Limite en compression (MPa) |
40 |
||
Module d’écrouissage (GPa) |
2 |
Tableau 5-1 : Propriétés des matériaux
Câbles de précontrainte
Les câbles ont une tension initiale imposée à \(3,75\mathit{MN}\) . Dans le cas de la configuration avec câbles frottants, on considère un recul d’ancrage pour les câbles horizontaux égal à \(\mathrm{5mm}\) . Les coefficients de frottements dans cette configuration sont \(\varphi =0,001{m}^{-1}\) pour le frottement linéaire et \(f=0,21{\mathit{rad}}^{-1}\) pour le frottement courbe. Il n’y a pas de perte de tension initiale par frottement pour les autres configurations.
Conditions aux limites
L’enceinte est encastrée à sa base.
Chargement
Le chargement considéré dans l’étude est un impact sur petite zone carrée de la surface extérieure du cylindre. L’impact est imposé par un effort de pression sur une surface de \(4,43{m}^{2}\) environ, identifié par le groupe de maille CYL_PRES. Ce chargement correspond à une force d’impact de \(26,6\mathit{MN}\) . La courbe de chargement est donnée .
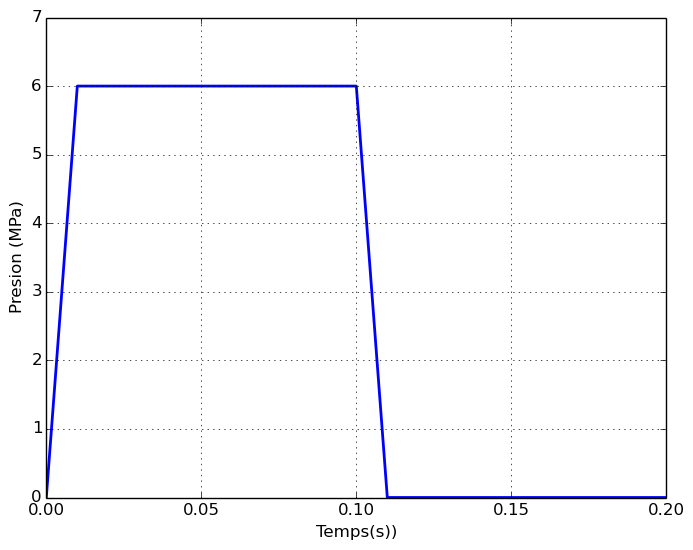
Figure 5-a : Courbe de chargement
Paramètre de calcul
On utilise un pas de calcul fixe égal à \({5.10}^{-6}s\) . Le calcul est réalisé jusqu’à l’instant 0,2 s.
Suite à la mise sous précontrainte dans Code-Aster, via la macro-commande CALC_PRECONT, la structure est déformée par la mise en tension des câbles. Les déformées obtenues pour les trois configurations d’études sont présentées avec un facteur d’amplification de 5000.
Dans les trois cas, on observe une réduction du diamètre du cylindre et un affaissement du dôme. On note que la déformée pour les configurations câbles adhérents et glissants est identique.
Câbles adhérents |
Câbles glissants |
Câbles frottants |
|
|
|
Figure 5.1.1-a : Déformée suite à la mise en précontrainte(facteur d’amplification 5000)
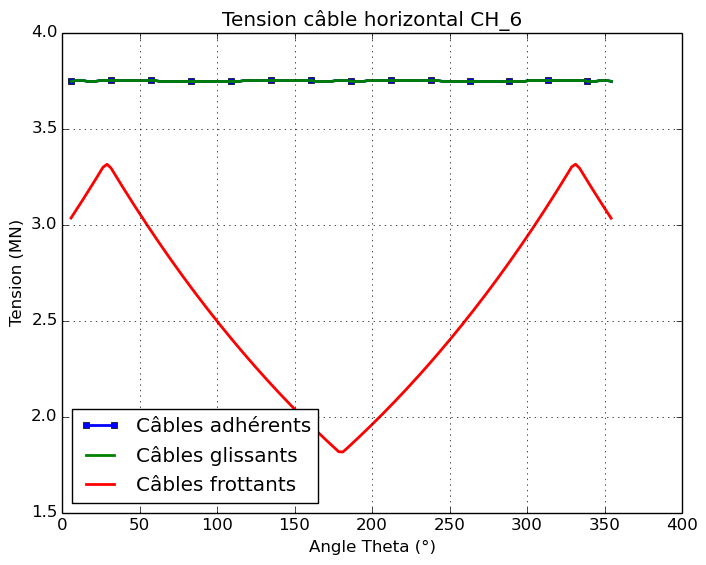
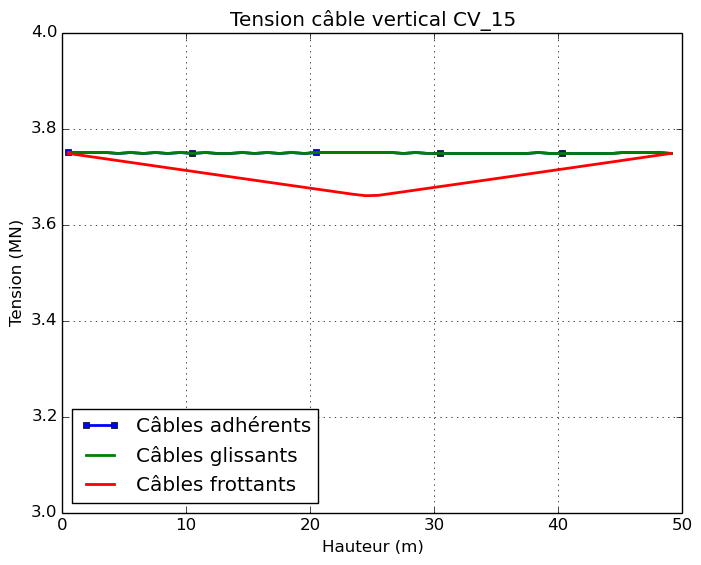
La tension des câbles, résultant de la mise en précontrainte, est définie par la macro-commande CALC_PRECONT qui suit les règles du BPEL [3]. Les profils de tension dépendent donc des paramètres de frottement et du recul d’ancrage. Il est possible d’appliquer des coefficients de frottement sur tous les types de câbles pour représenter de façon réaliste la mise en tension. Dans le cas de cette étude, aucun coefficient de frottement n’est imposé, ni recul d’ancrage pour les câbles adhérents et glissants. La comparaison des tensions le long des câbles horizontaux et verticaux (voir Figure) confirme que la précontrainte imposée est identique dans ces deux cas. La tension des câbles est constante le long des câbles, égale à \(3,75\mathit{MN}\) .
Dans le cas de la configuration avec câbles frottants, on considère un frottement linéaire, un frottement courbe et un recul d’ancrage pour les câbles horizontaux. Ceci se manifeste par des profils de tension variables le long du câble. Pour les câbles verticaux, on note une perte de tension entre le centre du câble et les extrémités due au coefficient de frottement linéaire. Pour les câbles horizontaux, la perte de tension entre le centre des câbles et les extrémités est plus prononcée car le frottement courbe est plus important que le frottement linéaire. La tension varie entre \(1,8\mathit{MN}\) et \(3,2\mathit{MN}\) . Le pic de tension n’est pas mesuré aux extrémités des câbles en raison du recul d’ancrage considéré. La baisse sensible de la tension effective des câbles horizontaux conduit à une déformée de la structure moins prononcée que pour le cas câbles adhérents et glissants. La variation de la tension le long des câbles frottants peut également conduire à une dissymétrie du comportement de la structure. Il est donc important de modéliser correctement la position des ancrages des câbles, i.e. une alternance des ancrages de part et d’autres de la structure. Ceci assure une précontrainte uniforme.
|
|
Figure 5.1.1-b : Tension le long des câbles
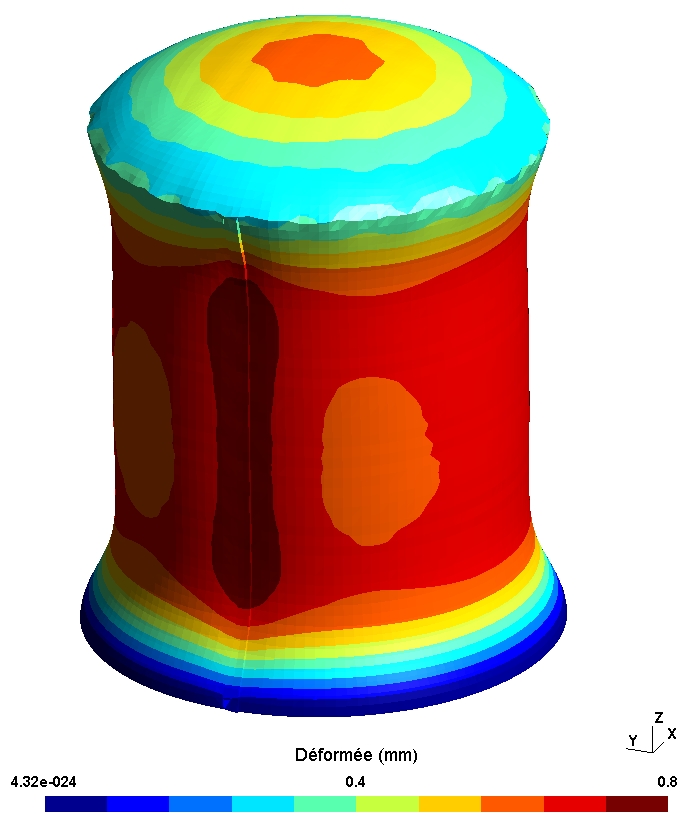
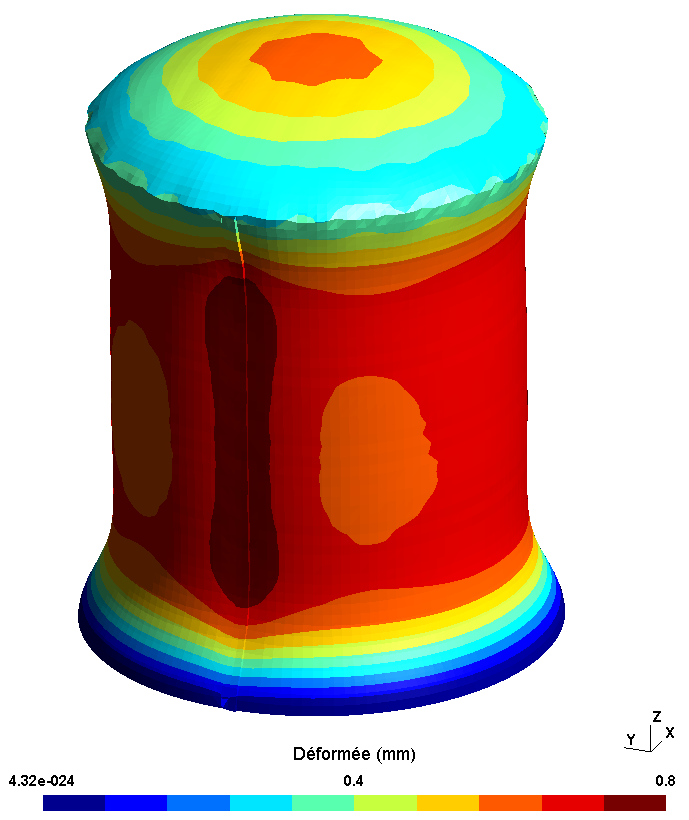
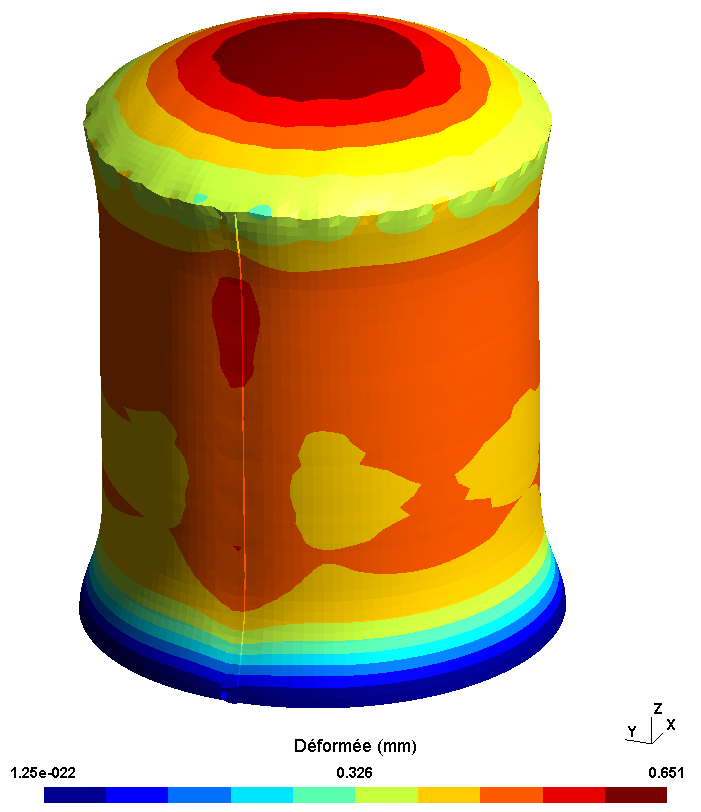
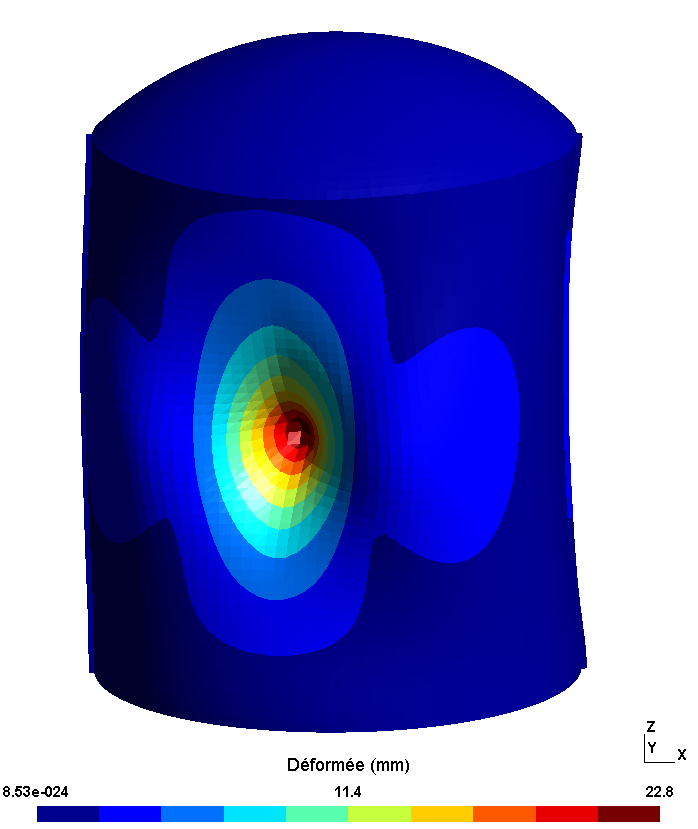
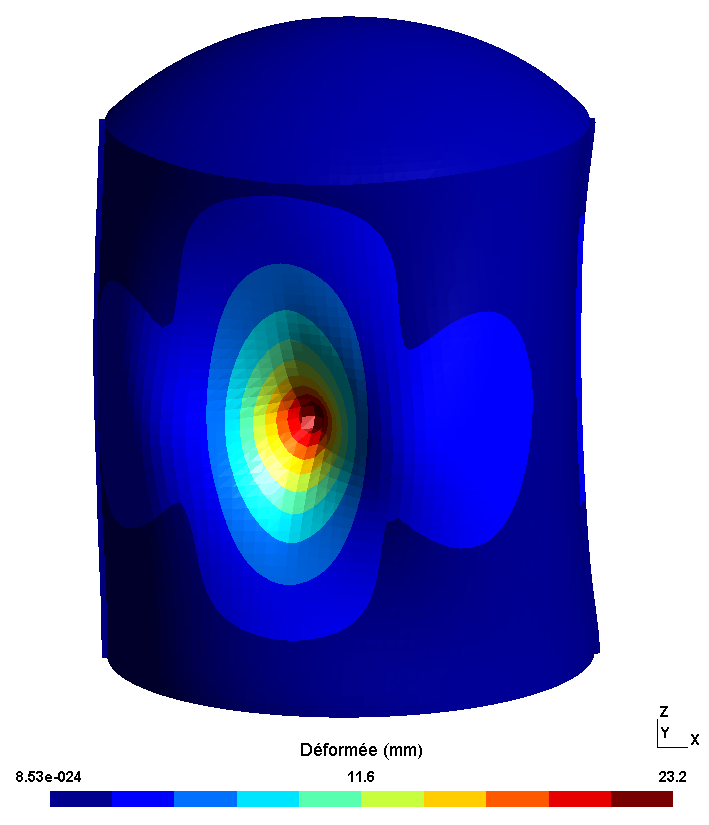
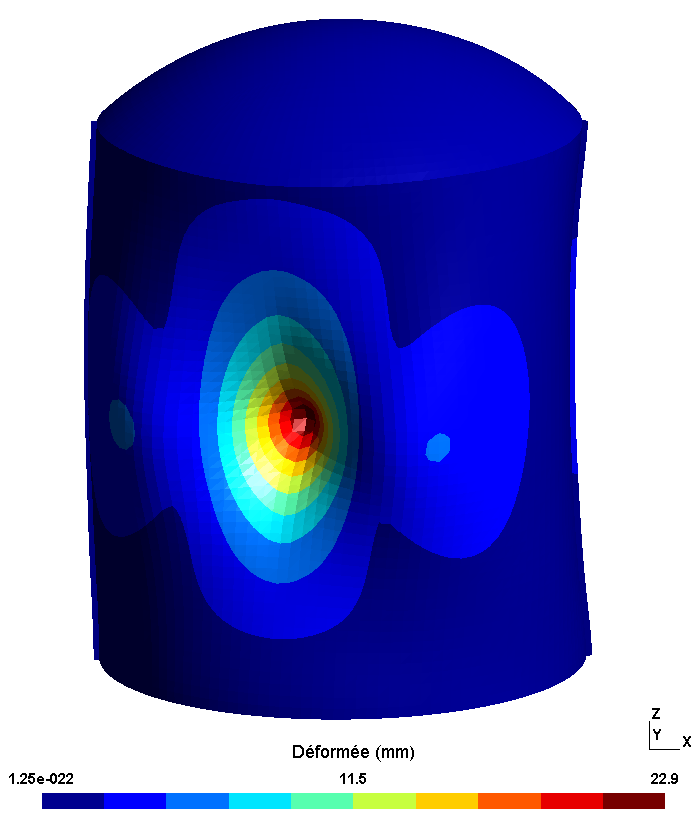
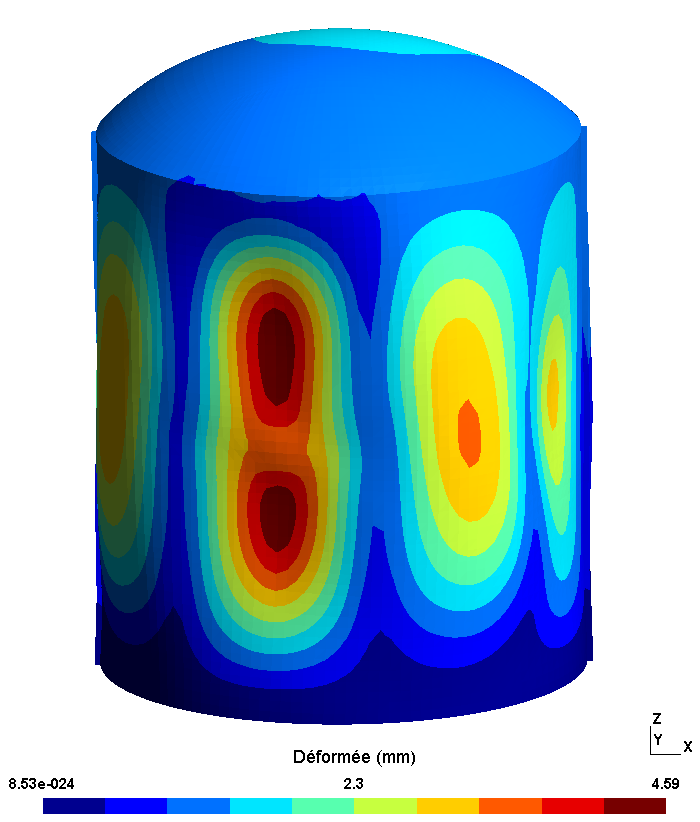
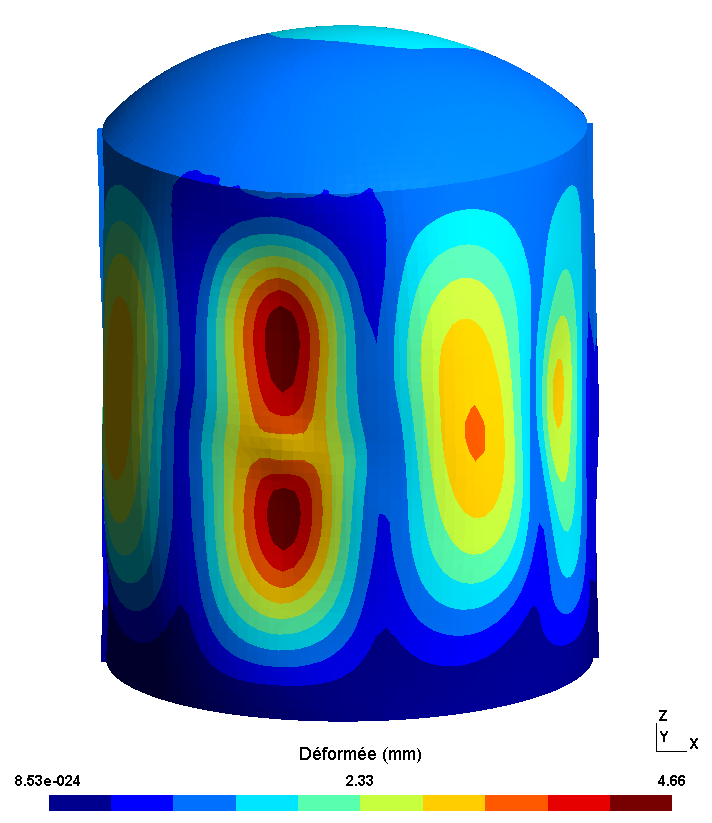
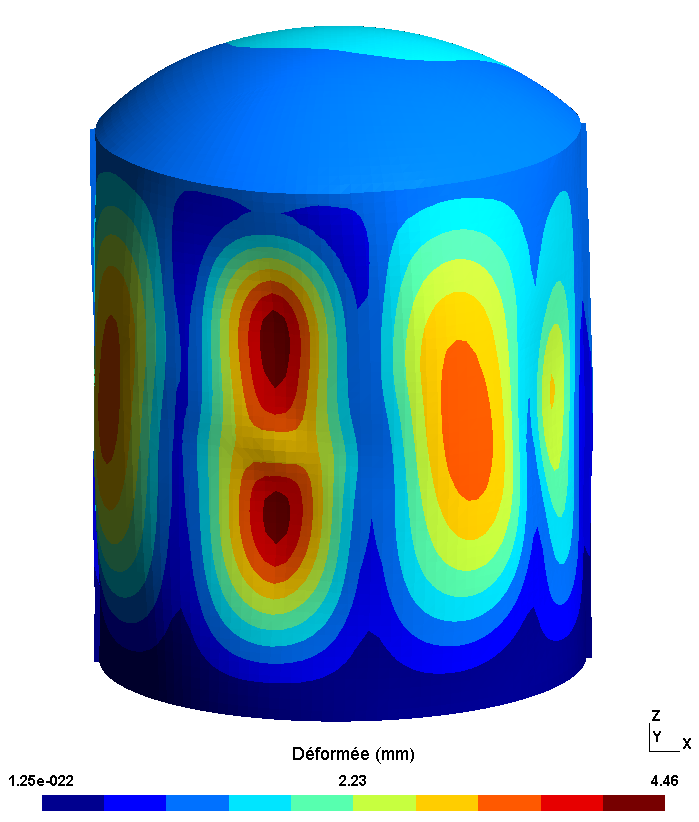
Au cours de l’impact, la structure de l’enceinte se déforme localement au niveau de la zone d’impact CYL_PRES. Les déformées de l’enceinte sont données pour les instants de calcul \(0,1s\) et \(0,2s\) .Le déplacement du centre de la zone d’impact est également présenté : on sépare la composante radiale et verticale du déplacement.
Instant |
Câbles adhérents |
Câbles glissants |
Câbles frottants |
\(0,1s\) |
|
|
|
\(0,2s\) |
|
|
|
Figure 5.1.2-a : Déformées de la structure
La composante radiale du déplacement atteint un maximum d’amplitude de \(2,6\mathit{cm}\) . La zone d’impact se déplace dans un premier temps vers l’intérieur du cylindre. A la fin du chargement, le déplacement s’inverse et devient positif, ce qui correspond à un déplacement vers l’extérieur du cylindre. L’onde de flexion se propage dans le cylindre comme on peut le visualiser sur les déformées à l’instant \(0,2s\) . Le déplacement vertical du point central de la zone d’impact varie également lors du calcul mais l’amplitude reste inférieure à \(0,6\mathit{mm}\) .
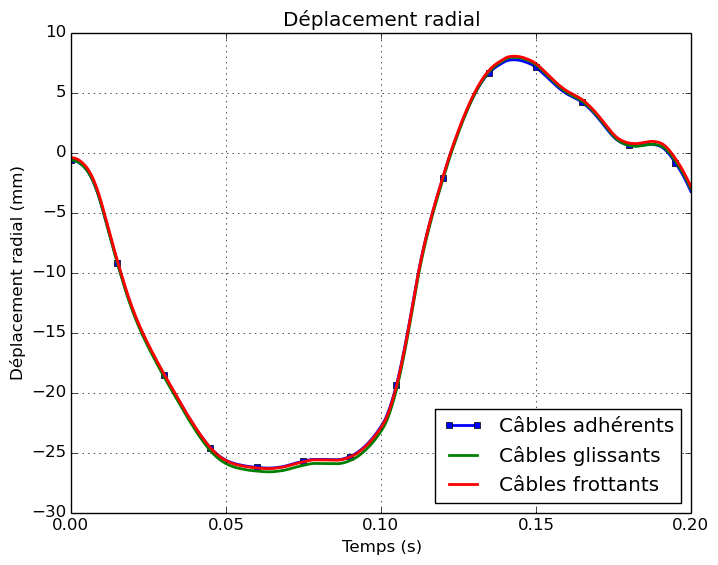
|
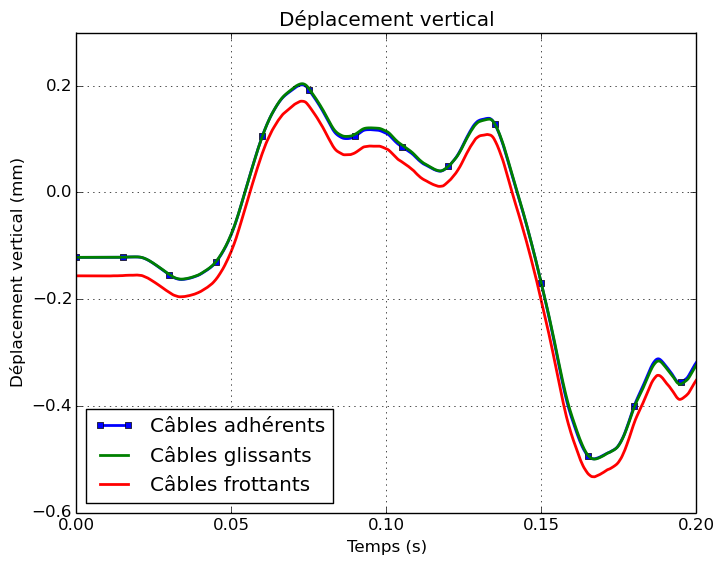
|
Figure 5.1.2-b : Déplacements du centre de la zone d’impact
La comparaison des trois configurations met en évidence que la réponse globale de la structure lors de l’impact est peu influencée par le choix de la modélisation des câbles.
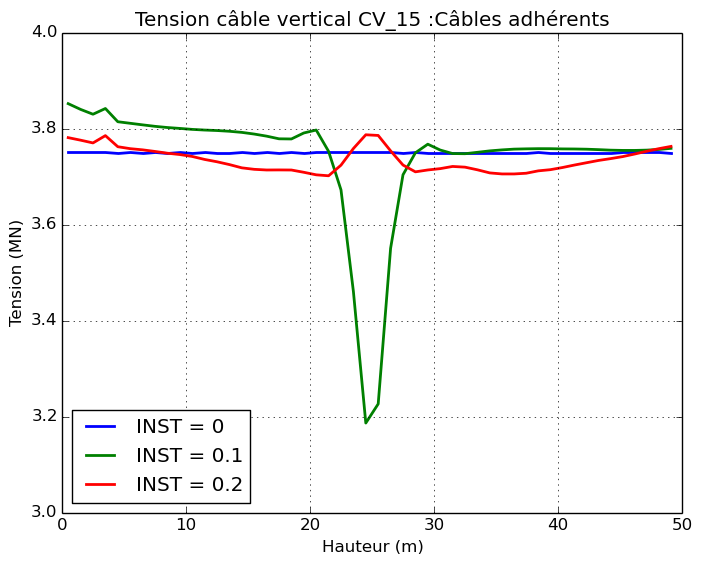
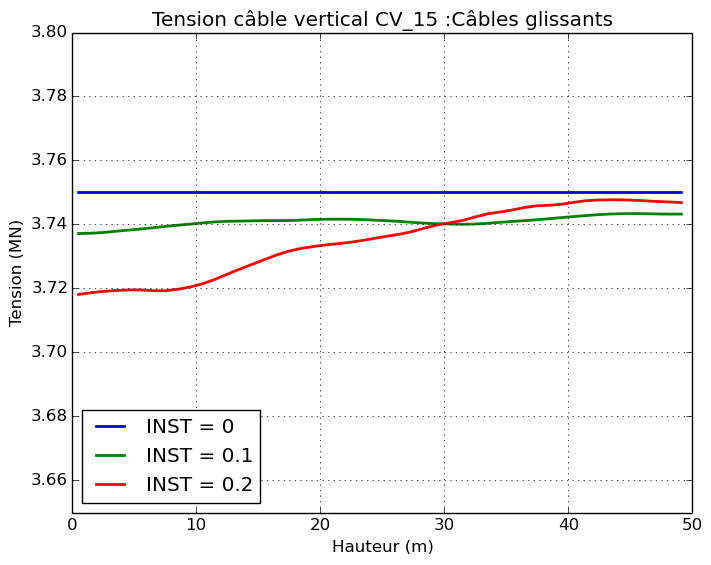
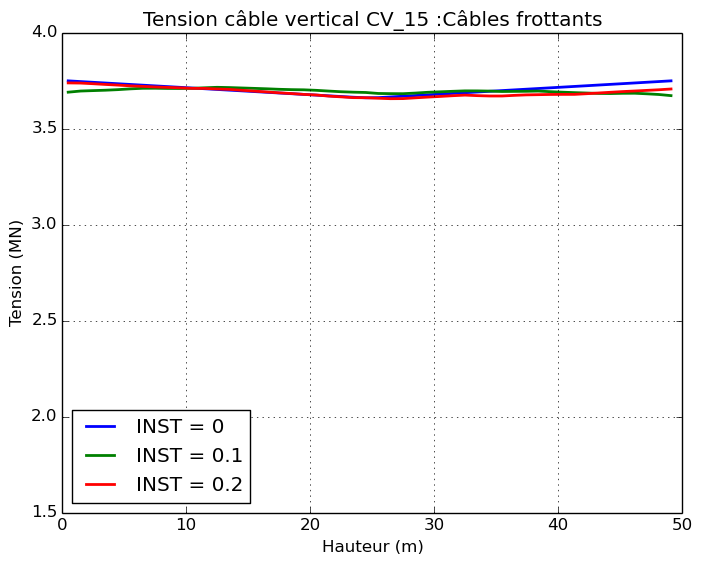
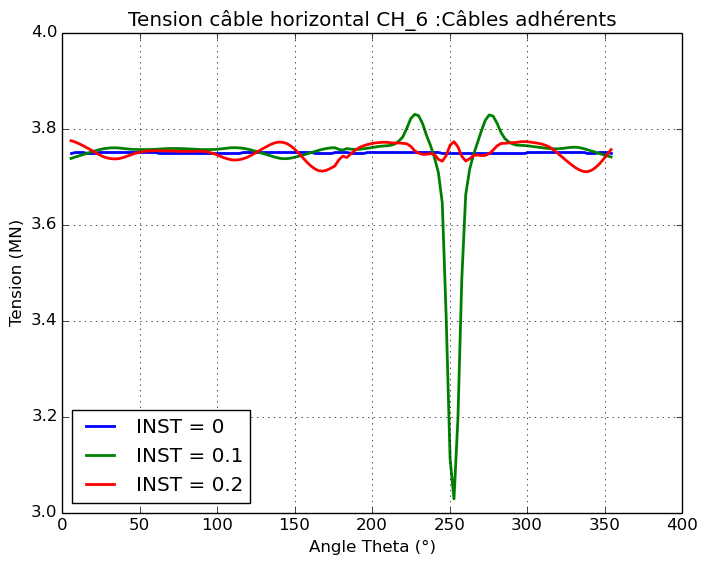
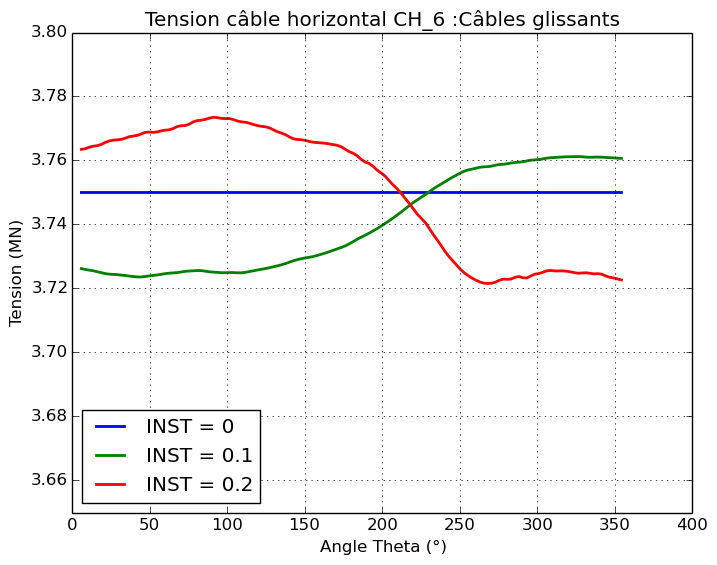
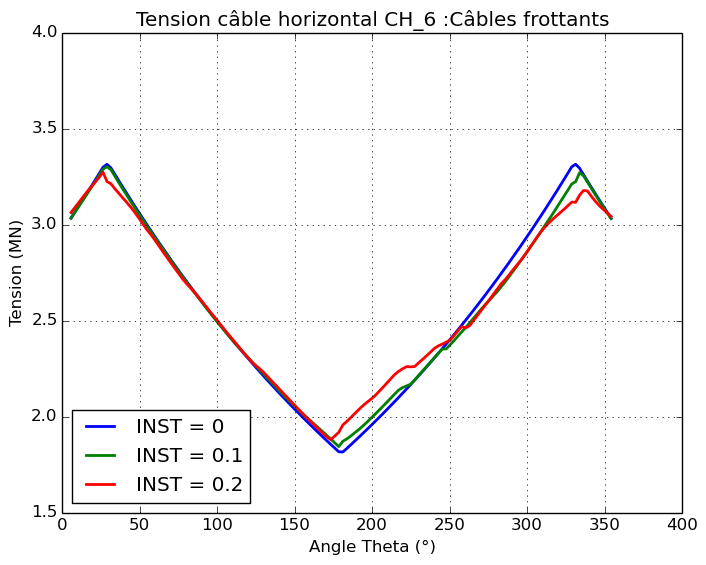
Les différences apparaissent dans la comparaison de la réponse des câbles eux-mêmes. Le profil de tension le long des deux câbles traversant la zone d’impact, CH_06 et CV_15, est présenté .
Pour les câbles adhérents, la zone d’impact peut être clairement identifiée le long du câble (hauteur ~ \(\mathrm{25m}\) et angle \(\theta =250°\) ). La déformation locale de la coque en béton armé au niveau de la zone d’impact est directement transmise au câbles adhérents via les liaisons cinématiques. Les câbles étant positionnés en face externe du cylindre, l’impact induit un effort de compression dans les câbles. La tension des câbles se réduit à \(\mathrm{3MN}\) localement pour l’instant de calcul \(0,1s\) .
Pour les câbles glissants, le profil de tension le long des câbles reste constant tout au long du calcul autour de \(3,75\mathit{MN}\) . Le glissement du câble autorisé dans sa gaine permet d’accommoder les déformations importantes de la coque en béton au niveau de la zone d’impact.
Pour les câbles frottants, le profil de tension le long des câbles n’est pas constant à cause du frottement. L’effet de l’impact a peu d’influence sur le profil de tension.
Câble |
Câbles adhérents |
Câbles glissants |
Câbles frottants |
Vertical |
|
|
|
Horizontal |
|
|
|
Figure 5.1.2-c : Profils de tension des câbles
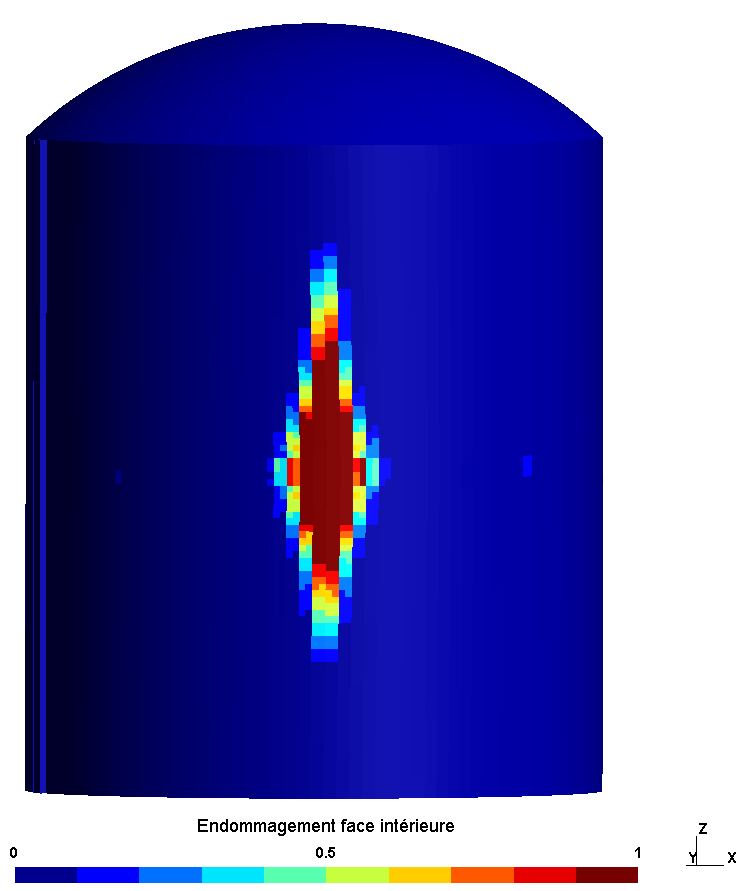
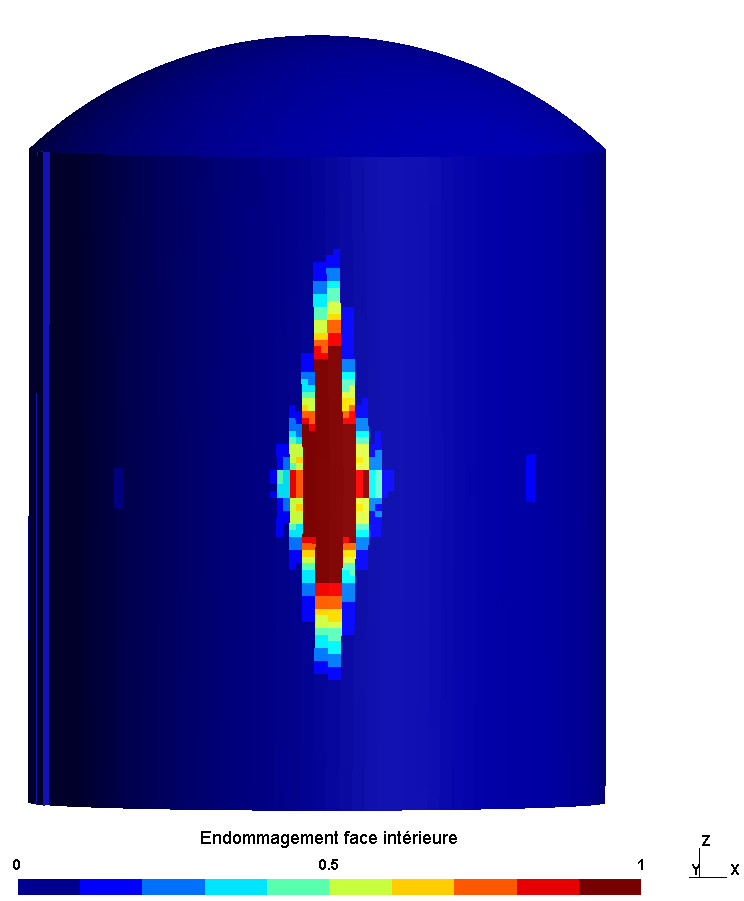
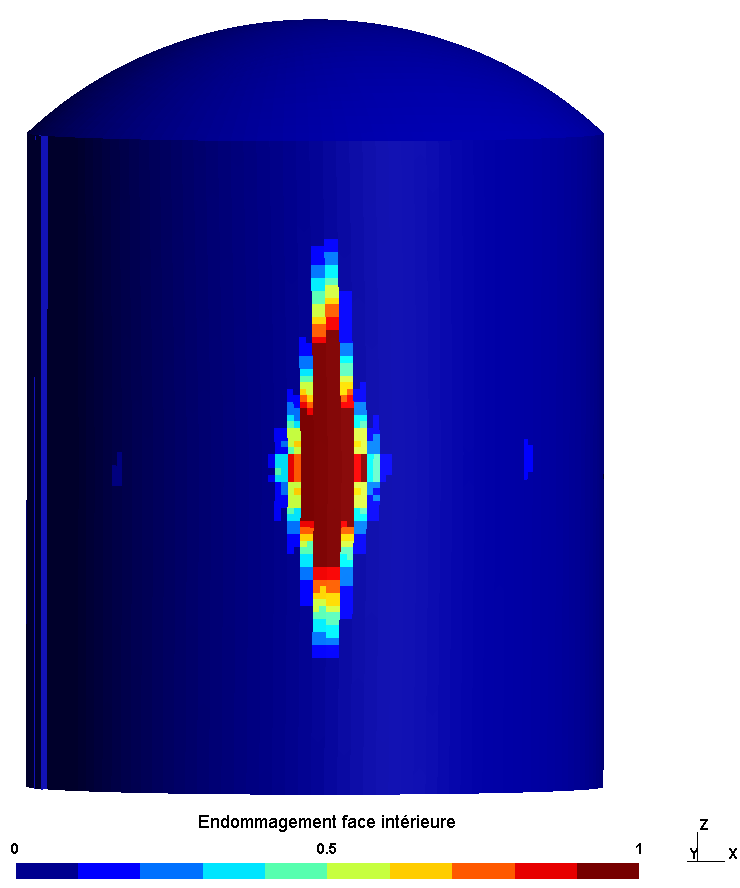
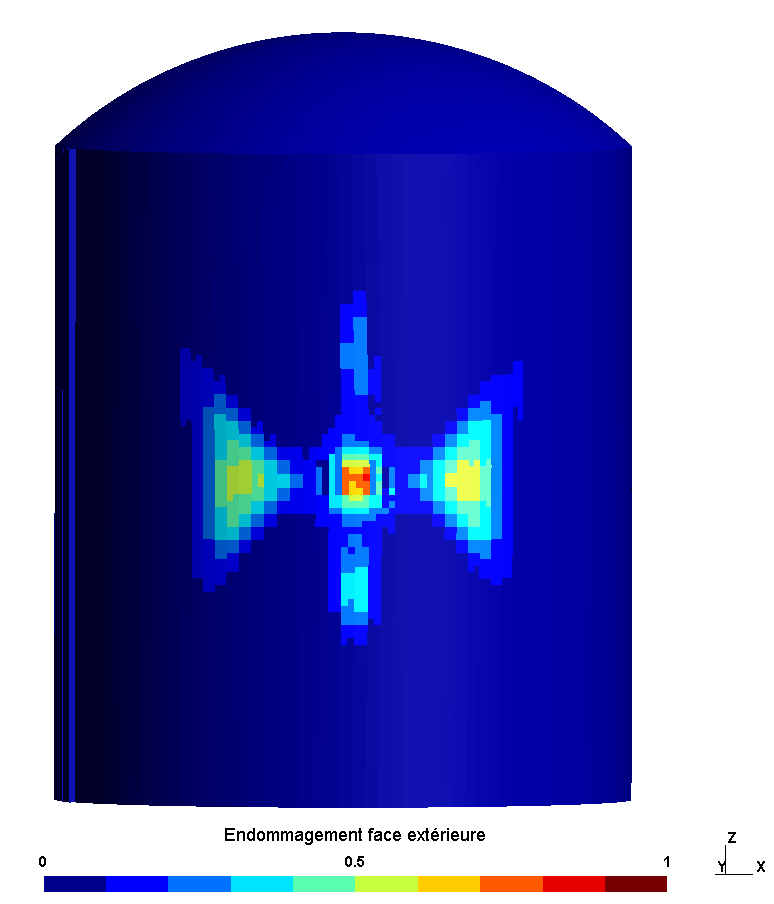
présente les endommagements de la face intérieure et extérieure en fin de calcul, à l’instant \(t=0,2s\) . L’endommagement apparaît dans un premier temps en face intérieure du cylindre, qui est soumis à un effort de traction due à l’impact. A la fin de l’application du chargement, le retour de la structure et les déplacements positifs provoque un endommagement de la face extérieure du cylindre.
L’endommagement de la face inférieure se trouve autour de la zone d’impact et dans la direction verticale. Ce résultat est cohérent avec la déformée de la structure à l’instant \(0,2s\) . L’onde de choc génère des déformations importantes au-dessus et en-dessous de la zone d’impact.
L’endommagement de la face extérieure se trouve autour de la zone d’impact et dans la direction horizontale.
L’endommagement est similaire dans les trois configurations d’étude.
Face |
Câbles adhérents |
Câbles glissants |
Câbles frottants |
Intérieure |
|
|
|
Extérieure |
|
|
|
Figure 5.1.2-d : Endommagement à t =0,2s
Les temps de calcul sur le cluster Aster5 pour les trois configurations sont indiqués dans le . Le temps de calcul de la configuration avec les câbles frottants est plus important que pour les autres configurations en raison du nombre important d’éléments discrets et de la loi de frottement à imposer.
Temps de calcul |
Câbles adhérents |
Câbles glissants |
Câbles frottants |
Calcul complet |
5,9 h |
6,7 h |
11,1 h |
Calcul Europlexus |
4,2 h |
5,1 h |
9,3 h |
Tableau 5.1.2-1 : Temps de calcul sur Aster5
Temps de calcul |
Câbles adhérents |
Câbles glissants |
Câbles frottants |
Calcul complet |
5,9 h |
6,7 h |
11,1 h |
Calcul Europlexus |
4,2 h |
5,1 h |
9,3 h |
Bilan#
Ce document illustre la méthodologie de prise en compte de la précontrainte dans un calcul Europlexus réalisé dans l’environnement de Code_Aster via la macro-commande CALC_EUROPLEXUS sur une étude simplifiée d’impact sur une enceinte.
Les trois types de modélisation de câbles possibles dans Europlexus sont considérés à savoir les câbles adhérents, glissants et frottants. Les spécificités de la mise en données de chaque cas sont présentées ainsi que les résultats des trois calculs.
Bibliographie#
[1] EUROPLEXUS: A Computer Program for Analysis of Fast Transient Phenomena Involving Structures and Fluids in Interaction,
http://www-epx.cea.fr ` <http://www-epx.cea.fr/>`_.
[2] S.Potapov, E. Cheignon, Modélisation des câbles adhérents, glissants et frottants dans Europlexus, Note H-T61-2015-04268-FR.
[3] Règles BPEL 91, Règles techniques de conception et de calcul des ouvrages et constructions en béton précontraint suivant la méthode des états limites. CSTB, ISBN 2-86891-214-1.
[4] ETC-C 2010 Edition, EPR Technical code for civil works, AFCEN.
[5] R7.01.02Modélisation des câbles de précontrainte.
[6] U2.03.06 Réalisation d’une étude génie civil avec câbles de précontrainte.
[7] P. Koechlin , MOCO, version 2007. Documentation de référence et d’utilisation, Note H-T62- 2007-00635FR, 2007.
[8] L. Idoux, Projet SAGA-3 : Etude illustrative de chute d’avion par un chaînage Code_Aster - Europlexus avec précontrainte des câbles et utilisation d’un cisaillement non linéaire dans la loi de comportement GLRC, Note H-T62-2012-01812-FR.