r4.05.05 Génération de signaux sismiques#
Résumé:
Dans les études sismiques «best-estimate», on est souvent amené à effectuer des analyses dynamiques transitoires. Le signal sismique est alors modélisé par un processus stochastique. Ce processus exprime l’accélération au sol en fonction du temps.
On appelle trajectoires les signaux temporels (accélérogrammes) qui sont des réalisations du processus stochastique. Ces signaux peuvent provenir des bases de données (accélérations au sol mesurées lors de séismes) ou être obtenus par simulation numérique (cf. aussi [bib17] ) . La simulation de signaux sismiques artificiels, telle que réalisée par l’opérateur GENE_ACCE_SEISME, est décrite dans ce document. L’opérateur propose deux modélisations:
modèle de DSP de Kanai-Tajimi (§2)
modèle de DSP compatible avec un spectre de réponse cible (§3)
Dans les deux cas, il est possible d’introduire une évolution du contenu fréquentiel et de l’amplitude (modulation) avec la durée du séisme.
Modèle de DSP de Kanai-Tajimi évolutive#
Le modèle de DSP de Kanai-Tajimi [bib13] qui exprime un bruit blanc filtré et modélise l’accélération sismique en champ libre est l’un des plus classiques. Les deux paramètres du modèle original de Kanai-Tajimi sont donc la pulsation propre du filtre ainsi que l’amortissement de ce dernier. Ce modèle a connu des évolutions depuis, notamment en ce qui concerne le filtrage du contenu basses fréquences [bib2] et l’introduction de l’évolution du contenu fréquentiel des signaux sismiques ( Ahmadi & Fan [bib1] ) . Le filtrage des basses fréquences permet d’obtenir des signaux en accélération qui peuvent être intégrés sans dérives en déplacement et en vitesse (il faut avoir recours à la « baseline correction » si des constantes d’intégration doivent être éliminées). Enfin, une fonction de modulation est appliquée afin d’obtenir la variation de l’amplitude. Ce modèle est implanté dans Code_Aster et disponible via l’opérateur GENE_ACCE_SEISME, option DSP *.*
Formulation générale du modèle#
La modélisation retenue est résumée dans ce qui suit:
Le processus \(Y\) est caractérisé par la DSP de Kanai-Tajimi (KT): cette DSP modélise la réponse en accélération absolue d’une masse soumise à une excitation par bruit blanc (le mouvement sismique au rocher). Autrement dit, la DSP de Kanai-Tajimi décrit un bruit blanc filtré par un oscillateur de pulsation propre \({\omega}_{0}\) et amortissement réduit \({\xi}_{0}\) .
La pulsation fondamentale \({\omega}_{0}\) de la DSP de KT évolutive est une fonction du temps:
\({S}_{\mathit{KT}}(\omega ,t)=\frac{({\omega}_{0}{(t)}^{4}+4{\xi}_{0}^{2}{\omega}_{0}{(t)}^{2}{\omega}^{2})}{({({\omega}_{0}{(t)}^{2}-{\omega}^{2})}^{2}+4{\xi}_{0}^{2}{\omega}_{0}{(t)}^{2}{\omega}^{2})}{S}_{0}\) (10)
On suppose une évolution linéaire de la pulsation propre par rapport au temps durant la phase forte du séisme:
\({\omega}_{0}(t)=\lbrace \begin{array}{cc}{\omega}_{1}& \mathrm{si}t<{t}_{1}\\ {\omega}_{1}-\omega '(t-{t}_{m})& \mathrm{si}{t}_{1}<t<{t}_{2}\end{array}\) (11)
où \({t}_{1}\) et \({t}_{m}\) désignent respectivement le début et l’instant de milieu de la phase forte: \({t}_{m}=0.5({t}_{1}+{t}_{2})\) (cf. aussi §1.2 pour une définition de ces quantités). Pour \(t<{t}_{1}\) la pulsation propre est supposée constante est égale à \({\omega}_{1}={\omega}_{0}({t}_{1})\) .
Pour \(t>{t}_{2}\) , la pulsation propre est supposée constante est égale à \({\omega}_{2}={\omega}_{1}-\omega '({t}_{2}-{t}_{1})\) . L’utilisateur doit veiller à ce que la pulsation propre donnée par cette relation reste positive au cours du temps.
Filtrage de la DSP de KT par un filtre de pulsation propre \({\omega}_{f}\) et un amortissement réduit \({\xi}_{f}=1.0\) selon Clough & Penzien (CP). Ce filtrage permet d’ôter le contenu en très basses fréquences qui conduit à des dérives non nulles (déplacements et vitesses non nulles à la fin du séisme). Dans l’implémentation Code_Aster , on prend \({\omega}_{f}=0.05{\omega}_{0}\) par défaut, mais l’utilisateur peut fournir autre valeur s’il le souhaite. Les sismologues appellent la fréquence \({\omega}_{f}\) «Corner Frequency», à savoir la fréquence minimale en dessous de laquelle le spectre doit tendre vers 0. Ceci nous conduit à la DSP corrigée \({S}_{\mathrm{CP}}(\omega )\) :
\({S}_{\mathrm{CP}}(\omega ,t)=∣h(\omega )∣{}^{2}{S}_{\mathrm{KT}}(\omega ,t)\) , où le filtre s’écrit \(h(\omega )=\frac{{\omega}^{2}}{({\omega}_{f}^{2}-{\omega}^{2}+\mathrm{2i}{\xi}_{f}{\omega}_{f}\omega )}\)
On propose deux fonctions de modulation temporelle de l’amplitude \(q(t)\) : la fonction gamma et la fonction de Jennings & Housner [bib4]. Ces fonctions ainsi que leur paramétrage sont décrit dans le chapitre 1.
L’évolution de la pulsation fondamentale du modèle de Kanai-Tajimi évolutif est illustrée sur la Figure 1a . La Figure 2a montre la DSP de Kanai-Tajimi filtré (DSP de Clough & Penzien) pour une fréquence propre donnée. Pour des fonctions de DSP régulières, la fréquence propre du filtre est proche de la fréquence fondamentale de la DSP. Dans la figure 1, on visualise également la largeur de bande de la DSP, noté \(\delta\) . La largeur de bande de la DSP est liée à l’amortissement du filtre comme explicité dans le §3.1.
Remarque:
Un modèle très similaire à celui décrit ci-dessus est proposé dans la référence (Rezaeian & Der Kiureghian, [bib9,bib10]) *. La différence entre les deux approches réside principalement dans l’écriture du problème dans le domaine temps par* Rezaeian & Der Kiureghian et non dans le domaine des fréquences à travers la densité spectrale comme proposé ici. Or, l’écriture dans le domaine temps possède un certain nombre de désavantages, comme la nécessité d’évaluer l’intégrale de convolution et de travailler avec le processus de Wiener (bruit blanc) qui n’est pas un processus du second ordre. La formulation du problème par un bruit blanc filtré décrit par sa DSP évolutive comme proposé ici est, en revanche, très aisée et numériquement bien plus efficace.
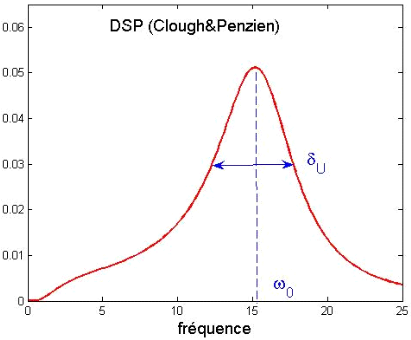
Figure 2a DSP de Kanai-Tajimi après filtrage des basses fréquences selon Clough & Penzien [bib2].
Paramétrage des fonctions de modulation#
Les paramètres qui caractérisent l’allure de la fonction de modulation sont la durée de phase forte \({T}_{\mathrm{SM}}\) , l’instant du début de la phase forte \({t}_{\mathrm{ini}}\) .L’amplitude des signaux à générer est déterminée par la donnée de l’intensité d’Arias \({I}_{a}\) (énergie), l’écart-type \({\sigma}_{X}\) sur la durée de la phase forte ou encore le maximum médian \({a}_{m}\) sur la durée de la phase forte.
On suppose données les moyennes de ces paramètres, notamment durée de phase forte moyenne \(\stackrel{ˉ}{T}{}_{\mathrm{SM}}\) , instant du début de la phase forte moyenne \(\stackrel{ˉ}{{t}_{\mathrm{ini}}}\) et l’intensité d’Arias moyenne \({\stackrel{ˉ}{I}}_{a}\) .
En pratique, le maximum médian \({a}_{m}\) est associé à la donnée du PGA ( Peak Ground Acceleration ). Ainsi, si le PGA est donné, alors on considère que celui-ci correspond à la médiane des maxima \({a}_{m}=\mathrm{Médiane}({\max}_{t\in T}(∣X(t)∣))\) des trajectoires du processus (durant la phase forte \(T{}_{\mathrm{SM}}\) ). Ceci nous permet de déterminer l’écart-type \({\sigma}_{X}\) correspondant à ce maximum à l’aide du facteur de pic \({\eta}_{{T}_{\mathrm{SM}}}\) :
\({a}_{m}\approx {\eta}_{{T}_{\mathrm{SM}}}{\sigma}_{X}\) (8)
Le facteur de pic est donné par la formule
\({\eta}_{{T}_{\mathrm{SM}},p}^{2}=2\ln({\mathrm{2N}}_{\eta}[1-\exp(-{\delta}^{1.2}\sqrt{\pi \ln({\mathrm{2N}}_{\eta})})])\) (9)
où \({N}_{\eta}=1,4427{T}_{\mathrm{SM}}{\nu}_{0}^{+}\) . Les variables \({\nu}_{0}^{+}\) (fréquence centrale) et \(\delta\) (largeur de bande) se calculent à partir des moments de la DSP selon l’expression (17) du §3.1.
L’intensité d’Arias moyenne \({\stackrel{ˉ}{I}}_{a}\) d’un processus \(Y(t)\in ℝ\) modulé par une fonction \(q(t)\) , décrit par l’équation (1), s’exprime comme:
\(\stackrel{ˉ}{{I}_{a}}=E(\frac{\pi}{2g}{\int}_{0}^{\infty}{X}^{2}(t)\mathrm{dt})=\frac{\pi}{2g}{\int}_{0}^{\infty}{q}^{2}(t)E({Y}^{2}(t))\mathrm{dt}\) (4)
sachant que \(X(t)=q(t)Y(t)\) . L’opérateur \(E\) dans l’expression ci-dessus désigne l’espérance mathématique et \(g=\mathrm{9.81m}/{s}^{2}\) . Si on normalise le processus \(Y(t)\) de sorte à ce que \({\sigma}_{Y}(t)=1\) , on peut écrire:
\(\stackrel{ˉ}{{I}_{a}}=\frac{\pi}{2g}{\int}_{0}^{\infty}{q}^{2}(t)\mathrm{dt}\) (5)
En pratique l’intégration se fait jusqu’à l’instant de fin \(T\) des signaux sismiques. La durée de la phase forte moyenne \(\stackrel{ˉ}{T}{}_{\mathrm{SM}}\) est définie à partir de l’intensité d’Arias qui exprime l’énergie contenu dans le signal sismique. Ainsi, \(\stackrel{ˉ}{T}{}_{\mathrm{SM}}\) est définie comme la durée de temps entre les instant de temps \({t}_{0.05}\) et \({t}_{0.95}\) où respectivement 5% et 95% de l’intensité d’Arias sont réalisés. L’instant \({t}_{0.05}\) désigne en conséquence le début de la phase forte moyenne, \(\stackrel{ˉ}{t}{}_{\mathrm{ini}}\) , tel que:
\(\stackrel{ˉ}{t}{}_{\mathrm{ini}}:\frac{\pi}{2g\stackrel{ˉ}{{I}_{a}}}{\int}_{0}^{{t}_{\mathrm{ini}}}{q}^{2}(t)\mathrm{dt}=0.05\) (6)
et \(\stackrel{ˉ}{t}{}_{\mathrm{ini}}+\stackrel{ˉ}{T}{}_{\mathrm{SM}}\) la fin de la phase forte:
\(\stackrel{ˉ}{t}{}_{\mathrm{ini}}+\stackrel{ˉ}{T}{}_{\mathrm{SM}}:\frac{\pi}{2g\stackrel{ˉ}{{I}_{a}}}{\int}_{0}^{\stackrel{ˉ}{t}{}_{\mathrm{ini}}+\stackrel{ˉ}{T}{}_{\mathrm{SM}}}{q}^{2}(t)\mathrm{dt}=0.95\) (7)
Étant donné la durée de la phase forte, l’intensité d’Arias moyenne \({\stackrel{ˉ}{I}}_{a}\) permet de déterminer l’écart-type du processus \(X\) .
Remarque: Les paramètres des fonctions de modulation sont déterminés à partir de la phase forte moyenne et l’intensité d’Arias moyenne, comme décrit ci-dessus. Les phases fortes, maxima (PGA) et intensités d’Arias des signaux sismiques générés avec cette modélisation exhiberont en conséquence une certaine variabilité autour des moyennes.
Incertitudes et variabilité naturelle des signaux#
Les paramètres du modèle de Kanai-Tajimi sont:
La durée moyenne de la phase forte \(\stackrel{ˉ}{T}{}_{\mathrm{SM}}\) et l’instant de début de la phase forte moyenne \(\stackrel{ˉ}{t}{}_{\mathrm{ini}}\) (fonction de modulation),
La pulsation propre \({\omega}_{1}\) et la pente \(\omega '\) de la DSP de Kanai-Tajimi (ou \({\omega}_{0}\) si on considère une valeur constante),
L’amortissement réduit \({\xi}_{0}\) de la DSP de Kanai-Tajimi,
L’intensité d’Arias moyenne \({\stackrel{ˉ}{I}}_{a}\) (énergie moyenne contenu dans le signal sismique), le PGA (maximum médian \({a}_{m}\) ) ou l’écart-type \({\sigma}_{X}\) .
Afin de mieux représenter la variabilité naturelle des signaux sismiques et pour tenir compte de l’incertitude sur les paramètres du modèle, on peut modéliser ces derniers par des variables aléatoires. Chaque signal sismique simulé correspond alors à un tirage particulier des paramètres du modèle. La méthode de tirage de l’Hypercube Latin constitue une méthode efficace qui permet de bien balayer le domaine de définition des paramètres pour un nombre réduit de tirages.
Les valeurs moyennes ainsi que les distributions de ces paramètres peuvent être estimées à partir de signaux sismiques naturels correspondants au scénario recherché. Ils sont, pour certains, également disponibles dans la littérature. On en trouve un traitement très exhaustif dans la référence [bib9]. Des moyennes, valeurs minimales et maximales et distributions des paramètres, identifiées à partir d’accélérogrammes enregistrés sur sol moyen à dur et \(D>\mathrm{10km}\) (issus de la base de séismes NGA [bib14]), sont présentées dans l’annexe de ce document. Ces résultats sont tirés du rapport de Rezaeian & Der Kiureghian [bib9].
Modèle de DSP pour générer des signaux « compatibles » avec un SRO cible#
Dans le cas où le séisme est modélisé par un processus stationnaire gaussien durant la phase forte \({T}_{\mathit{SM}}\) , il est possible d’établir une relation (approchée) entre la densité spectrale \({S}_{Y}(\omega )\) du processus et son spectre de réponse d’oscillateur (SRO), \({S}_{a}(\omega ,\xi )\) . Ce dernier est en effet souvent donné par les sismologues ou prescrit par des codes et règlementations.
Identification d’une DSP compatible avec un spectre cible#
Le problème du premier passage permet de lier le SRO (pour une pulsation \({\omega}_{n}\) et un amortissement réduit \({\xi}_{0}\) donnés) à l’écart-type du processus via le facteur de pic \(\eta\) :
\({S}_{a}({\omega}_{n},{\xi}_{0})\approx {\omega}_{n}^{2}{\eta}_{{T}_{\mathrm{SM}},p}{\sigma}_{n}\) (12)
où \({\sigma}_{n}\) est l’écart-type du processus réponse
\({\sigma}_{n}^{2}=\int∣{h}_{{\omega}_{n},{\xi}_{0}}(\omega )∣{}^{2}{S}_{Y}(\omega )d\omega\) (13)
et:
\({h}_{{\omega}_{n},{\xi}_{0}}(\omega )=\frac{1}{{\omega}_{n}^{2}-{\omega}^{2}+\mathrm{2i}{\xi}_{0}{\omega}_{n}\omega }\) (14)
est la fonction de transfert (filtre) de pulsation propre \({\omega}_{n}\) et d’amortissement réduit \({\xi}_{0}\) .
Le facteur de pic permet d’estimer les \(p\) -fractiles de la distribution des maxima d’un processus gaussien à partir de l’écart-type. Le facteur de pic, dû à Vanmarcke [bib16], s’écrit:
\({\eta}_{{T}_{\mathrm{SM}},p}^{2}=2\ln({\mathrm{2N}}_{\eta}[1-\exp(-{\delta}^{1.2}\sqrt{\pi \ln({\mathrm{2N}}_{\eta})})])\) . (15)
Dans cette expression, \(\delta\) est la largeur de bande du processus (confer Figure 2a) et \({N}_{\eta}\) se détermine à partir de
la fréquence centrale \({\nu}_{0}^{+}\) comme
\({N}_{\eta}={T}_{\mathrm{SM}}{\nu}_{0}^{+}{(-\lnp)}^{-1}\) (16)
Dans cette expression, \(p\) désigne le fractile de la distribution des maxima considérée. En générale, on prend \(p=0.5\) ce qui correspond à la «médiane des maxima». La fréquence centrale \({\nu}_{0}^{+}\) désigne la fréquence où l’énergie du processus est concentrée. La fréquence centrale et la largeur de bande peuvent s’exprimer par les classiques formules de Rice:
\(\begin{array}{}{\nu}_{0}^{+}=\frac{1}{2\pi }\sqrt{\frac{{\lambda}_{2}}{{\lambda}_{0}}},\\ \delta =\sqrt{(1-\frac{{\lambda}_{1}^{2}}{{\lambda}_{0}{\lambda}_{2}})}\end{array}\) (17)
où les \({\lambda}_{i}\) sont les moments spectraux de la DSP du processus réponse:
\({\lambda}_{i}={\int}_{-\infty }^{+\infty }∣\omega ∣{}^{i}∣{h}_{{\omega}_{n},{\xi}_{0}}(\omega )∣{}^{2}{S}_{Y}(\omega )d\omega\) , (18)
avec en particulier \(\sqrt{{\lambda}_{0}}\) l’écart-type du processus. Afin de déterminer la DSP compatible avec le SRO, il faut inverser l’expression (12). On peut montrer que l’on a, en première approximation, pour une excitation par bruit blanc (\({S}_{Y}(\omega )=\mathrm{const}\) ) et pour un filtre avec fréquence propre \({\omega}_{n}\) :
\({\lambda}_{0}={\int}_{-\infty }^{+\infty }∣{h}_{{\omega}_{n},{\xi}_{0}}(\omega )∣{}^{2}{S}_{Y}(\omega )d\omega \approx {S}_{Y}({\omega}_{n}){\int}_{-\infty }^{+\infty }∣{h}_{{\omega}_{n},{\xi}_{0}}(\omega )∣{}^{2}d\omega =\frac{\pi {S}_{Y}({\omega}_{n})}{2\xi {\omega}_{n}^{3}}\) (19)
Cette formule a été améliorée dans la suite par Vanmarcke [bib15, bib16] pour tenir compte de la contribution de \({S}_{Y}(\omega )\) dans la gamme des pulsations \([-{\omega}_{n},{\omega}_{n}]\) où \({h}_{{\omega}_{n}}(\omega )\approx 1/{\omega}_{n}^{2}\) :
\({\lambda}_{0}\approx \frac{\pi {S}_{Y}({\omega}_{n})}{2\xi {\omega}_{n}^{3}}+\frac{2}{{\omega}_{n}^{4}}{\int}_{0}^{{\omega}_{n}}{S}_{Y}({\omega}_{n})d\omega -\frac{2}{{\omega}_{n}^{3}}{S}_{Y}({\omega}_{n})\) (20)
Ceci nous conduit à la formule de Vanmarcke pour évaluer une DSP \({G}_{S}(\omega )\) à partir d’un SRO \({S}_{a}(\omega ,\xi )\) (pour un amortissement \({\xi}_{0}\) donné):
\({G}_{S}({\omega}_{n})=\frac{1}{{\omega}_{n}(\frac{\pi}{2{\xi}_{0}}-2)}\left[\frac{{S}_{a}^{2}({\omega}_{n},{\xi}_{0})}{{\eta}_{{T}_{\mathit{SM}},p}^{2}}-2{\int}_{0}^{{\omega}_{n}}{G}_{S}(\omega )d\omega \right],{\omega}_{n}>0\) (21)
sous condition que ces deux fonctions soient suffisamment lisses. La formule originale de Vanmarcke a ensuite été utilisée sous des formes plus ou moins proches par de nombreux auteurs [bib7,bib3]. Elle est implantée dans sa version originale, à savoir formule (21), dans GENE_ACCE_SEISME.
Pour déterminer une DSP compatible avec un SRO par cette formule, il faut connaître le facteur de pic (15) qui, lui, dépend des propriétés de la DSP à identifier (et qui est donc encore inconnue). Pour ce faire, on approche la fréquence centrale par la fréquence propre de l’oscillateur de sorte à ce que \({N}_{\eta}={T}_{\mathrm{SM}}\frac{{\omega}_{n}}{2\pi }{(-\lnp)}^{-1}\) . En outre, on exprime la largeur de bande en fonction de l’amortissement réduit \(\xi\) , toujours pour la réponse d’un oscillateur à un bruit blanc, par la formule [bib15]:
\(\delta =\sqrt{1-\frac{1}{1-{\xi}^{2}}{(1-\frac{1}{\pi}\arctan(\frac{2\xi \sqrt{1-{\xi}^{2}}}{1-2{\xi}^{2}}))}^{2}}\) (22)
Pour des valeurs d’amortissement faibles \(\xi <0.1\) , on peut estimer l’amortissement réduit par la relation asymptotique pour \(\xi \to 0\) , suivante [bib15]:
\(\delta \approx \sqrt{\frac{4\xi }{\pi}}\)
Une bonne approximation de l’amortissement réduit peut être obtenue en prenant \(\xi \approx {\frac{\pi \delta }{4}}^{2/1.2}\) .
La DSP identifiée peut ensuite être utilisée pour générer des trajectoires du processus stationnaire ou quasi stationnaire (variation de l’amplitude par multiplication par une fonction de modulation q(t)). Afin de coller au mieux au spectre cible, il est en général nécessaire de procéder à des itérations pour ajuster au mieux le contenu spectral [bib16].
Dans un premier temps, on améliore l’ajustement la DSP en faisant appel aux formules de Rice. Ces dernières permettent de lier la DSP au SRO, à travers le facteur de pic. On détermine les moments de la DSP pour ensuite calculer le facteur de pic (15) grâce aux expressions (17). Ainsi, à partir de la DSP à l’iteration i, \({G}_{S}^{i+1}({\omega}_{n})\) , on détermine le SRO correspondant \({S}_{a}^{i}({\omega}_{n})\) par la formule (12), et on évalue la nouvelle estimation de la DSP, \({G}_{S}^{i+1}({\omega}_{n})\) , en calculant:
\({G}_{S}^{i+1}({\omega}_{n})={G}_{S}^{i}({\omega}_{n}){({S}_{a}({\omega}_{n})/{S}_{a}^{i}({\omega}_{n}))}^{2}\) (23)
Dans l’expression (23), \({S}_{a}({\omega}_{n})\) est le spectre de réponse cible et \({S}_{a}^{i}({\omega}_{n})\) est le spectre de réponse, au sens de la médiane des maxima, déterminé par les formules de Rice pour la DSP \({G}_{S}^{i}({\omega}_{n})\) .
Dans un deuxième temps, on peut ajuster directement le contenu spectral du signal temporel ou d’un ensemble de signaux. Ceci est la démarche généralement adoptée dans la littérature, par exemple [bib16]. Dans cette approche, moins rigoureuse d’un point de vue du traitement du signal et des processus stochastiques, on génère un signal, on calcule son spectre de réponse, et on itère directement sur son contenu spectral. On utilise la même formule qu’auparavant (expression (23)), ce qui conduit à:
\({A}_{S}^{i+1}({\omega}_{n})={A}_{S}^{i}({\omega}_{n}){S}_{a}({\omega}_{n})/{S}_{a}^{i}({\omega}_{n})\) , (24)
mais où le spectre \({S}_{a}^{i}({\omega}_{n})\) à l’itération \(i\) est le spectre de réponse déterminé à partir de l’accélérogramme à l’itération \(i\) et \({A}_{S}^{i}({\omega}_{n})\) désigne le contenu spectral du signal.
**Remarque: D’un point de vue mathématique, le contenu spectral d’une réalisation du processus (ou de l’accélérogramme) correspond à la réalisation du processus incrémental* \(\mathit{dZ}\) défini dans le §4. C’est ce dernier qui est mis à jour dans les itérations afin d’améliorer l’ajustement au SRO cible.
Si l’on souhaite générer plusieurs signaux compatibles en médiane avec un SRO cible, il faut itérer sur le contenu spectral de cet ensemble de signaux (l’échantillon). Considérant le cas où l’on souhaite générer \(L\) signaux. Le spectre de réponse à calculer à chaque itération est la médiane des SRO des \(L\) signaux. C’est alors ce SRO médian qui est utilisé dans la formule (24) à la place de \({S}_{a}^{i}({\omega}_{n})\) . Ceci permet notamment d’obtenir un ensemble de signaux indépendants (et non corrélés). Cette propriété n’est pas garantie en générant et en effectuant les itérations sur les signaux distincts.
Modèle paramétrique non stationnaire pour la génération de signaux compatibles avec un spectre#
La DSP compatible avec le spectre identifiée selon la formule (21) ne permet pas de générer des signaux non stationnaires avec contenu fréquentiel évolutif. Pour cela, il faut revenir à un modèle paramétrique dans lequel la pulsation fondamentale \({\omega}_{0}\) fait partie des paramètres. Or, tout processus (Gaussien) physique peut être décrit par une densité spectrale rationnelle. On travaille donc avec une DSP rationnelle qui constitue une généralisation du modèle de Kanai-Tajimi.
Plus précisément, le modèle retenu est le suivant:
\({S}_{\mathit{FR}}(\omega ,t)=\frac{({R}_{0}^{2}+{R}_{2}^{2}{\omega}^{2})}{({({\omega}_{0}{(t)}^{2}-{\omega}^{2})}^{2}+4{\xi}_{0}^{2}{\omega}_{0}{(t)}^{2}{\omega}^{2})}\) (25)
Les paramètres de ce modèle, \({\omega}_{0}\) , \({\xi}_{0}\) et \({R}_{0}\) , \({R}_{1}\) , sont identifiés par un algorithme d’optimisation de sorte à minimiser l’erreur entre la DSP compatible avec le spectre, \({G}^{S}\) , (équation (21)) et la DSP rationnelle, \({S}_{\mathrm{FR}}\) (équation (25)). La méthode du Simplex est utilisée par GENE_ACCE_SEISME. Pour initialiser l’algorithme, on choisit les paramètres correspondants au classique modèle de Kanai-Tajimi. Par ailleurs, le filtre de Cough & Penzien décrit dans le §2 est appliqué.
Remarque : La formulation (25) a été retenue car l” introduction de paramètres supplémentaires, en augmentant l’ordre des polynômes, ne conduit pas à de meilleurs résultats.
La DSP rationnelle permet de générer des signaux dont le spectre moyen est proche de la cible. Dans le cas général, il reste une différence du fait d’avoir choisi un modèle paramétrique. Afin de coller au mieux au spectre cible, on postule l’équivalence de l’énergie du processus stationnaire sur la durée de la phase forte et le processus non stationnaire :
\({\int}_{0}^{{T}_{\mathrm{SM}}}{S}_{\mathrm{FRC}}(\omega ,t)\mathrm{dt}={G}^{S}(\omega ){\int}_{0}^{{T}_{\mathrm{SM}}}\mathrm{dt}\) (26)
où \({S}_{\mathrm{FRC}}(\omega ,t)={S}_{0}(\omega ){S}_{\mathrm{RC}}(\omega ,t)\) est la DSP rationnelle compatible avec le spectre. Si l’on considère une DSP rationnelle non évolutive ceci revient à appliquer un terme «correctif», \({S}_{0}(\omega )={G}^{S}(\omega )/{S}_{\mathrm{RC}}(\omega )\) , qui exprime la différence entre la DSP compatible avec le SRO et le modèle de DSP rationnelle évolutive. C’est cette dernière expression qui est implémentée en choisissant la valeur de référence à l’instant \({t}_{m}\) (milieu de la phase forte): \({S}_{\mathrm{RC}}(\omega ,{t}_{m})\) .
Le modèle rationnel compatible se résume ainsi:
Le processus \(Y\) est caractérisé par la DSP de type rationnelle (FR) corrigée pour s’ajuster au mieux à la DSP compatible avec le SRO.
La fréquence centrale \({\omega}_{0}\) de la DSP de \(\mathit{KT}\) évolutive est une fonction du temps
On applique une fonction de modulation temporelle de l’amplitude \(q(t)\) (cf section 1) pour obtenir la DSP évolutive (contenu fréquentiel et amplitude) \({S}_{X}\) .
Introduction de la variabilité naturelle des signaux (record-to-record variability)#
Selon les lois d’atténuation, les accélérations spectrales sont supposées suivre une loi lognormale. En conséquence, les spectres de réponse du mouvement du sol peuvent être modélisés par des vecteurs lognormales. Pour faciliter les notations et les manipulations mathématiques, on se ramène à des vecteurs gaussiens en considérant plutôt les log-spectres \(l{S}_{a}\) . Les composantes de ce vecteur sont les accélérations spectrales aux fréquences \(\omega ={\omega}_{1,}\mathrm{...},{\omega}_{N}\) . Ainsi, toujours selon les lois d’atténuation (par exemple [bib12]), on a \(\%{S}_{a}({\omega}_{n})=f({\omega}_{n},x)+{ϵ}_{n}\sigma ({\omega}_{n})\) où x désigne le jeu de paramètres caractérisant le scénario sismique (magnitude, distance etc) et \({\epsilon}_{n}\) sont des variables aléatoires gaussiennes standardisées. Ceci peut aussi s’écrire sous la forme: \({S}_{a}({\omega}_{n})=\stackrel{ˉ}{{S}_{a}}({\omega}_{n},x){\alpha}_{n}\) où \(\stackrel{ˉ}{{S}_{a}}({\omega}_{n},x)={e}^{f({\omega}_{n},x)}\) sont les accélérations spectrales médianes et \({\alpha}_{n}={e}^{\sigma ({\omega}_{n}){\epsilon}_{n}}\) sont des variables aléatoires lognormales de médiane unitaire. Ce modèle simple néglige les corrélations entre les accélération spectrales. Le modèles de coefficients de corrélation développé par Baker [bib3] à partir des bases de données américaines NGA [bib12, bib14], permet d’introduire cette corrélation.
Ainsi, pour un jeu de fréquences donné, le log-spectre est un vecteur gaussien corrélé, de moyenne \(\mu\) et de matrice de covariance \(\Sigma\) . Cette dernière exprime la corrélation entre les différentes accélérations spectrales. Le vecteur moyenne \(\mu\) contient les log-accélérations spectrales données par les lois d’atténuation, \(f({\omega}_{n},x)\) , alors que la matrice de covariance peut être construite à partir des écart-types \(\sigma ({\omega}_{n})\) et les coefficients de corrélation \({\rho}_{ij}\) selon la relation:
\({\Sigma}_{ij}={\rho}_{ij}\sigma ({\omega}_{i})\sigma ({\omega}_{j})\) (27),
Cette même distribution lognormale peut être introduite dans le modèle de DSP pour simuler des accélérogrammes dont les SRO respectent la distribution de la cible. À l’instar des accélérations spectrales, on modélise la DSP par un vecteur aléatoire \({S}_{\mathit{FRC}}=({S}_{\mathit{FRC}}({\omega}_{1}),\mathrm{...},{S}_{\mathit{FRC}}({\omega}_{N}))\) de médiane \({\stackrel{ˉ}{S}}_{\mathit{FRC}}\) . Les termes de cette DSP «aléatoire» s’écrivent:
\({S}_{\mathrm{FRC}}({\omega}_{n})={\alpha}_{n}^{2}{\stackrel{ˉ}{S}}_{\mathrm{FRC}}({\omega}_{n})\) (28)
où \(\alpha =({\alpha}_{1,}\mathrm{...},{\alpha}_{N})\) est un vecteur aléatoire lognormal correlée, de médiane unitaire et de matrice de log-covariance \(\Sigma\) .
Le choix d’utiliser, pour la DSP, la même distribution (lognormale) que celle observée pour le SRO se justifie par le fait que, pour des amortissements \({\xi}_{0}\) faibles, on dispose de l’approximation suivante:
\({S}_{a}^{2}({\omega}_{n},{\xi}_{0})\approx {\omega}_{n}^{4}{\eta}_{{T}_{\mathit{SM}},p=0,5}^{2}\frac{\pi {S}_{Y}({\omega}_{n})}{2{\xi}_{0}{\omega}_{n}^{3}}\)
où \({S}_{a}({\omega}_{n},{\xi}_{0})\) est un spectre cible et \({S}_{Y}({\omega}_{n})\) la DSP compatible avec ce dernier. Ceci indique une relation proportionnelle entre la DSP et le carré du SRO. Cette relation suggère que la DSP compatible avec les spectre doit suivre, à un facteur près, la même distribution que le SRO cible. D’où la relation (28).
Remarque : La démarche pour la génération d’accélérogrammes dont le spectre médian ainsi que les fractiles sont compatibles avec la distribution du SRO cible (donné par le lois d’atténuation) est décrite dans la référence [bib18].
Simulation de signaux sismiques compatibles avec un SRO: fonctionnalités implémentées dans GENE_ACCE_SEISME#
Pour la génération de signaux sismiques «compatibles avec un spectre», les trois configurations suivantes peuvent être considérées :
Génération d’un accélérogramme distinct compatible avec le SRO cible: on effectue des itérations sur le contenu spectral de l’accélérogramme en utilisant la formule (24).
Génération d’accélérogrammes dont le spectre médian est compatible avec le SRO cible: le spectre médian est considéré pour les itérations selon la formule (24).
Génération d’accélérogrammes compatibles avec la distribution (lognormale) du SRO: on renseigne le spectre médian et le spectre à un sigma, à savoir le fractile à 84%, ceci permet d’introduire la variabilité des accélérogrammes naturels (record-to-record variability) (§3.3).
GENE_ACCE_SEISME permet de générer des signaux selon ces trois critères. Quant au point 2, il est possible de déterminer la DSP compatible et puis de générer des signaux sismique sans itérations sur le contenu spectral. Si l’échantillon des signaux générés est suffisamment grand et si le SRO cible est un spectre physique, alors le spectre médian est proche de la cible. Pour des spectres de réponses non physiques, qui ont été élargies et subi d’autres traitements d’ajustement, on peut toujours procéder à des itérations, le critère porte alors sur le spectre médian. Le même facteur de correction sera appliqué à tous les accélérogrammes générés. Un plus grand l’échantillon permet en général d’obtenir un bon ajustement au SRO avec moins d’itérations.
Quand on intègre les signaux générés pour d’obtenir le déplacement, on peut parfois observer un comportement divergent: les déplacement ne s’annulent pas à la fin du séisme. Afin d’éviter ce type de problème, il suffit de filtrer les basses fréquences des signaux en accélération (filtre passe haut). Ceci permet d’enlever une possible dérive en déplacement. Le choix de la fréquence du filtre se fait par FREQ_FILTRE.
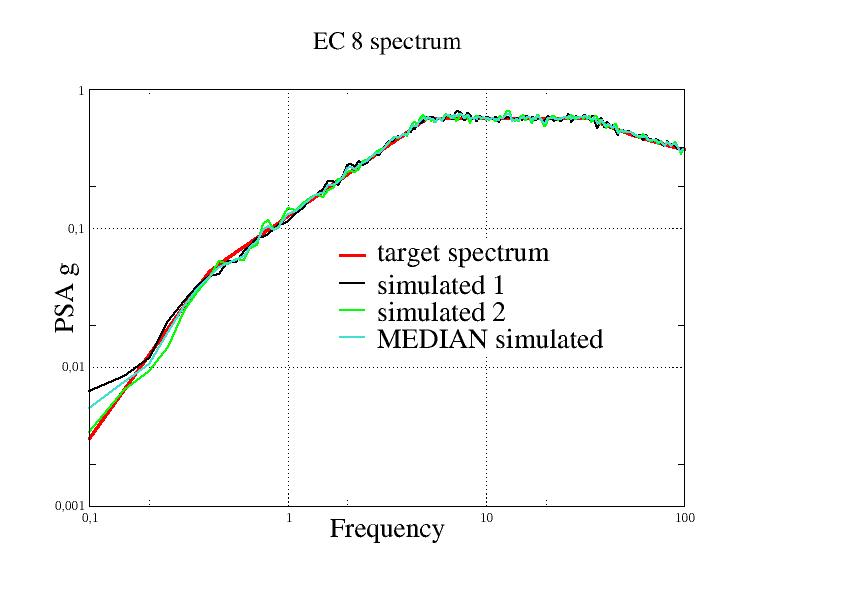
Figure 3a. Illustration de la configuration 1) pour un spectre cible EC8: simulation de deux accélérogrammes dont le spectre de réponse s’ajuste au mieux au SRO cible
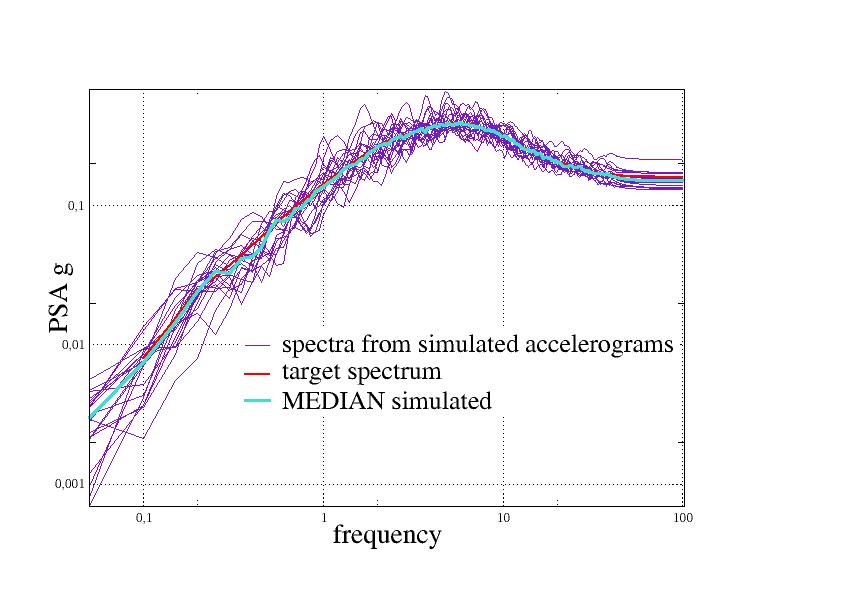
Figure 3b. Illustration de la configuration 2) pour un spectre issu de la base NGA (loi d’atténuation de Campbell & Bozorgnia): simulation d’un jeu accélérogrammes dont le spectre de réponse médian (courbe bleu) s’ajuste au mieux au SRO cible.
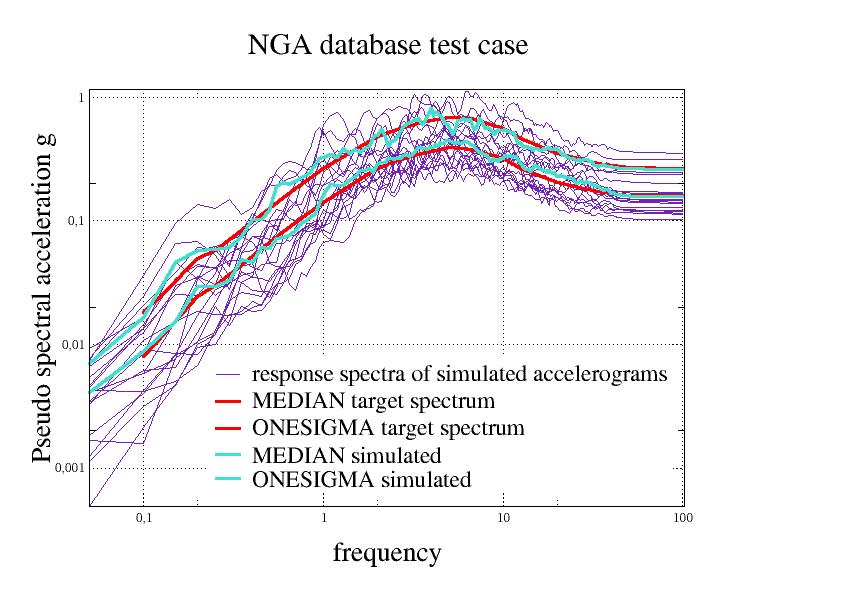
Figure 3c. Illustration de la configuration 3) pour un spectre issu de la base NGA (loi d’atténuation de Campbell & Bozorgnia): simulation d’un jeu accélérogrammes dont les spectres de réponse ont la distribution du SRO cible; on vérifie l’ajustement de la médiane et du fractile à un sigma (courbes bleu).
Modèle de DSP de Kanai-Tajimi en accord avec un SRO cible#
Alternativement, on peut estimer les paramètres de la DSP de Kanai-Tajimi, à savoir la fréquence propre \({\omega}_{0}\) et l’amortissement réduit \({\xi}_{0}\) , à partir des moments de la DSP compatible avec le spectre: \({\lambda}_{i}={\int}_{-\infty }^{+\infty }∣\omega ∣{}^{i}{G}^{S}(\omega )d\omega\) . Ceci permet de construire un modèle de séisme non stationnaire (non stationnaire en amplitude et en contenu fréquentiel) en introduisant l’évolution de la fréquence centrale.
Il faut alors identifier les paramètre \({\omega}_{0}\) et \({\xi}_{0}\) de manière à ce que les moments d’ordre 1 et 2 de la DSP de Kanai-Tajimi et de de la DSP \({G}^{S}(\omega )\) , compatible avec le SRO, soient proches ou coïncident. En pratique, il convient d’identifier \({\omega}_{0}\) et \({\xi}_{0}\) tels que la fréquence centrale \({\nu}_{0}^{+}\) et la largeur de bande \(\delta\) des DSP, définis dans la section 3.1, coïncident. Ces deux paramètres sont illustrés sur la figure 1 et peuvent être calculée à partir des moments par les classiques formules de Rice de l’expression (17). Pour déterminer ces quantités, il faut calculer les moments ce qui peut se réaliser avec Code_Aster à l’aide de l’opérateur POST_DYNA_ALEA. La pulsation propre \({\omega}_{0}\) et l’amortissement réduit \({\xi}_{0}\) identifiés sont ensuite utilisés pour construire le modèle de séisme avec GENE_ACCE_SEISME .
Remarque : Pour la réponse en déplacement d’un oscillateur à un bruit blanc, on connaît des expressions analytiques des paramètres \({\omega}_{0}\) et \({\xi}_{0}\) en fonction des moments et donc de la largeur de bande et fréquence centrale. Ces expressions s’appliquent également à la DSP de Kanai-Tajimi, si l’amortissement est faible. La DSP de Kanai-Tajimi correspond en effet à la réponse en accélération (absolue) d’un oscillateur soumis à un bruit blanc et non la réponse en déplacement.
Ainsi, si l’amortissement est faible, la fréquence propre de la DSP de Kanai-Tajimi peut être prise égale à la fréquence centrale. Mais l’approximation n’est en générale pas très bonne. Des études ont montré qu’une meilleure approximation peut être obtenue en prena nt la fréquence correspondant au centre de gravité de la partie positive de la DSP.
Rappelons que la fréquence centrale \({\nu}_{0}^{+}\) caractérise la fréquence où l’énergie du processus est concentrée. Dans le domaine temporel, elle correspond au taux de passages par zéro à pente positive du processus. Il peut également être déterminé à partir d’un accélérogramme par comptage de passages positives par zé ro.
Cas de processus vectoriels#
Signaux sismiques 2D et 3D#
Connaissant le coefficient de correlation r, il est possible de construire une matrice de densité spectrale \({S}_{X}(\omega ,t)\in {\mathit{Mat}}_{ℂ}(M,M)\) décrivant un processus vectoriel 2D ou 3D à partir de la DSP scalaire \({S}_{X}(\omega ,t)\in ℝ\) . Dans le cas de deux composantes horizontales, \(M=2\) , la matrice de DSP s’écrit:
\({S}_{X}(\omega ,t)=\left[\begin{array}{cc}{S}_{X}(\omega ,t)& \rho \\ \rho & {S}_{X}(\omega ,t)\end{array}\right]\)
Pour le séisme, la composante verticale est généralement considérée non corrélée aux deux composantes horizontales. GENE_ACCE_SEISME permet de générer des signaux 2D avec composantes horizontales corrélées (définie par le coefficient de corrélation COEF_CORR, qui peut être nul) et une composante verticale non corrélée aux deux autres, mais à laquelle s’applique le ratio horizontal/vertical.
Champ sismique variable en espace#
Dans le cadre d’une étude temporelle avec une excitation sismique variable en espace, le mouvement sismique est décrit par un champ spatio-temporel. Après discrétisation, le problème se ramène à la simulation d’un processus vectoriel, décrit par sa DSP matricielle comme pour le problème 2D.
Dans la littérature, des fonctions de cohérence \(\gamma\) sont proposées pour définir la corrélation spatiale du mouvement sismique. Deux types de fonctions de cohérences sont disponibles pour l’opérateur GENE_ACCE_SEISME: la fonction de cohérence exponentionnelle de Mita & Luco et la fonction empirique de Abrahamson. On trouve plus de détails sur les fonctions de cohérence dans la documentation de l’opérateur DYNA_ISS_VARI, en particulier R4.05.04. On construit une matrice de densité spectrale \({S}_{X}(\omega ,t)\in {\mathit{Mat}}_{ℂ}(M,M)\) , où \(M\) est le nombre de nœuds pour lesquels il faut évaluer le champ. Les composantes de cette matrice s’écrivent:
\({S}_{ij}(\omega ,t)=\gamma (\omega ,{d}_{ij}){S}_{X}(\omega ,t)\)
où \({d}_{ij}\) est la distance horizontale entre deux nœuds \(i\) et \(j\) du maillage.
Simulation de trajectoires du processus#
La méthode classique pour la simulation d’un processus stochastique Gaussien stationnaire, centré s’appuie sur la représentation spectrale des processus, cf. par exemple [bib11]. La représentation spectrale ainsi que l’algorithme de simulation numérique sont rappelés dans ce qui suit.
On traite le cas général d’un processus Gaussien vectoriel \(Y(t)\in {ℝ}^{M},t\in [0,T]\) caractérisé par sa DSP matricielle \({S}_{Y}(\omega )\in {\mathrm{Mat}}_{ℂ}(M,M)\) . Cette méthode peut être étendue au cas des processus non stationnaires à DSP évolutive \({S}_{X}(\omega ,t)\in {\mathit{Mat}}_{ℂ}(M,M)\) si le processus est à variation lente.
Discrétisation#
La simulation numérique nécessite la discrétisation du domaine temporel. On utilise une discrétisation temporelle à pas \(\Delta t\) constant. La fréquence de coupure se déduit directement de cette valeur: \({\Omega}_{C}=\pi /(\Delta t).\) Pour une discrétisation par N pas de temps, on note \({t}_{j}=j\Delta t,j=0,\mathrm{...}N-1\) les points d’échantillonnage temporel. Par ailleurs, on définit le pas de fréquence par \(\Delta \omega =2{\Omega}_{C}/N\) et la durée du signal temporel est \(T=\Delta t(N-1)\) .
Les densités spectrales sont définies sur l’intervalle \(F=[-{\Omega}_{C},+{\Omega}_{C}]\) et les points de discrétisation fréquentielle sont choisis comme les milieux des pavés:: \({\omega}_{j}=-{\Omega}_{C}+(0.5+j)\Delta \omega ,j=0,\mathrm{...}N-1\) .
Représentation spectrale des processus stationnaires#
Le théorème de la représentation spectrale (cf. [bib11]) dit qu’il existe un processus stochastique vectoriel \(dZ(\omega )\in {\mathrm{ℂ}}^{M}\) à incréments orthogonaux tels que:
\(Y(t)={\int}_{{\mathrm{ℝ}}^{M}}{\mathrm{e}}^{i\omega t}dZ(\omega )\) (29)
Ce processus, appelé processus spectral associé à \(Y\) , vérifie:
\(E(dZ(\omega )dZ{(\omega ')}^{\ast })=\lbrace \begin{array}{cc}0& \mathit{si}\omega \ne \omega '\\ {S}_{Y}(\omega )d\omega & \mathit{si}\omega =\omega '\end{array}\) , (30)
où \(E\) est l’opérateur de l’espérance mathématique et \(dZ\) est un processus à incréments orthogonaux.
La matrice de densité spectrale \({S}_{Y}(\omega )\) étant, par construction, une matrice hermitienne positive pour tout \(\omega \in F\) , il existe une matrice \(L(\omega )\in {\mathrm{ℂ}}^{M}\) telle que:
\({S}_{Y}(\omega )=L(\omega )L{(\omega )}^{\mathrm{\ast }}\) (31)
La matrice \(L(\omega )\) peut être obtenue par décomposition de Cholesky si \({S}_{Y}(\omega )\) est définie positive. \(L(\omega )\) est alors une matrice triangulaire inférieure. Dans le cas plus général, la décomposition en vecteurs propres peut être utilisée. Si le processus est scalaire, le problème se réduit au calcul de la racine de la DSP. On peut alors simuler des trajectoires du processus par la formule suivante:
\(Y(t)=\sqrt{\Delta \omega }\mathrm{\Re }e{\sum}_{j=0}^{N-1}L({\omega}_{j}){\chi }_{j}{\mathrm{e}}^{i{\omega}_{j}t}\) (32)
où les \({\chi }_{j}\) sont des vecteurs aléatoires gaussiens complexes dont les composantes sont indépendantes.
L’utilisation de la IFFT permet de réduire considérablement le coût numérique de la simulation. En effet, on peut écrire l’expression (26) sous la forme
\(Y({t}_{k})=\sqrt{\Delta \omega }\mathrm{\Re }e({V}_{k}{\mathrm{e}}^{-i\pi k(1-1/N)})\) (33)
où \({V}_{k}\) est calculable par IFFT:
\({V}_{k}={\sum}_{j=0}^{N-1}L({\omega}_{j}){\chi }_{j}{\mathrm{e}}^{2i\pi kj{N}^{-1}}\)
Cet algorithme peut être utilisé pour les processus gaussiens stationnaires et non stationnaires à DSP séparable. Dans ces cas, on obtient les signaux sismiques modulés en appliquant la fonction de modulation de sorte à ce que \(X(t)=q(t)Y(t)\) . Ceci est réalisé par l’opérateur GENE_ACCE_SEISME.
Représentation spectrale des processus non stationnaires à DSP évolutive#
La représentation spectrale s’applique toujours à des processus non stationnaires décrits par leur DSP évolutive non séparable:
\(Y(t)={\int}_{{\mathrm{ℝ}}^{M}}{\mathrm{e}}^{i\omega t}dZ(\omega ,t)\) (34)
sous condition que la DSP évolue lentement avec le temps [bib8,bib6]. Il existe alors un processus stochastique \(dZ(\omega ,t)\in {ℂ}^{M}\) à incréments orthogonaux tels que
\(E(dZ(\omega ,t)dZ{(\omega ',t)}^{\mathrm{\ast }})=\lbrace \begin{array}{cc}0& \mathit{si}\omega \mathrm{\ne }\omega '\\ {S}_{Y}(\omega ,t)d\omega & \mathit{si}\omega =\omega '\end{array}\) (35)
où \(E\) est l’opérateur de l’espérance mathématique et \(dZ\) est un processus à incréments orthogonaux. On peut alors simuler des trajectoires du processus par la formule
\(Y(t)=\sqrt{\Delta \omega }\mathrm{\Re }e{\sum}_{j=0}^{N-1}L({\omega}_{j},t){\chi }_{j}{\mathrm{e}}^{i{\omega}_{j}t}\) (36)
où les \({\chi }_{j}\) sont des vecteurs aléatoires gaussiens complexes dont les composantes sont indépendantes. La matrice \(L(\omega ,t)\) peut toujours être obtenue par décomposition de Cholesky si le rang de \({S}_{Y}(\omega ,t)\) est maximal. En revanche, il n’est pas possible de faire appel à la transformée de Fourier rapide comme dans le cas stationnaire (cf. équation (33)) ce qui augmente les temps de calcul.
On obtient les signaux sismiques modulés en appliquant la fonction de modulation de sorte à ce que \(X(t)=q(t)Y(t)\) . Ceci est réalisé dans Code_Aster par l’opérateur GENE_ACCE_SEISME.
Références#
Ahmadi, G. Fan FG, (1990) Nonstationary Kanai-Tajimi models for El Centro 1940 and Mexico City 1985 earthquake, Probabilistic Engineering Mechanics, 5, 171-181.
Clough RW., Penzien J. (1975), Dynamics of Structures. McGraw-Hill.
Baker J.W., Jayaram N. (2008) Correlation of spectral acceleration values from NGA ground motion models, Earthquake Spectra 24:1 299-317.
Jennings, P.C., Housner, G.W., Tsai, C. (1969) Simulated earthquake motions for design purpose. Proc. 4th World Conference Earth. Eng. Santiago, vol. A-1: 145-160.
Kanai, K. (1957). Semi-empirical formula for the seismic characteristics of the ground motion. Bulletin of the Earthquake Research Institute, University of Tokyo 35:2, 308-325.
Poirion, F. and Soize, C. (1989). Simulation numérique des champs stochastiques gaussiens homogène et non homogène. La Recherche Aérospatiale, pp. 41-61.
Preumont A. (1980), A method for generation of artificial accelerograms. Nuclear Eng. Design, 59, 357-368.
Priestley, M.B. (1964) Evolutionary spectra and nonstationary processes. J. Royal Statistical Society 27(2), 204-237.
Rezaeian S, Der Kiureghian A. (2010), Stochastic modeling and simulation of ground motions for performance-based earthquake engineering, PEER report 2010/02.
Rezaeian S, Der Kiureghian A. (2010), Simulation of synthetic ground motions for specified earthquake and site characteristics, Earthquake Engineering and Structural Dynamics 39 , 1155-1180.
Soize, C. (1993), Méthodes mathématiques en analyse du signal. Masson, Paris.
Stewart et al. (2008), Special Issue of the NGA Relations Project, Earthquake Spectra 24:1.
Tajimi, H. (1960). A statistical method of determining the maximum response of a building structure during an earthquake. 2nd WCEE, Tokyo 2, pp. 781-798.
US NGA strong-motion database (
Vanmarcke E.H. (1972), Properties of spectral moments with applications to random vibration. J Engrg. Mech. Div. ASCE 98, 425-446.
Vanmarcke, E.H., Gasparini, D.A. (1976) Simulated earthquake motions compatible with prescribed response spectra. SIMQKE User’s manual and documentation. MIT Report R76-4.
Zentner I., Poirion F. (2012), Enrichment of seismic ground motion databases using Karhunen-Loève expansion. Earthquake Engineering and Structural Dynamics 41:14, 1945-1957.
Zentner I. D’Amico L. Cacciola P. (2013), Simulation of non stationary ground motion compatible with NGA-spectra. Proceedings of ICOSSAR, Columbia university, New York
Zentner, I. Stochastic models for the simulation of ground motion time histories. Note EDF R&D H-T62-2014-07824-EN.
Documentation de Code_Aster:
[R4.05.02]: Approche stochastique pour l’analyse sismique.
[R4,05,04]: Interaction sol-structure avec variabilité spatiale (opérateur DYNA_ISS_VARI).
[R7.10.01]: Dépouillement de réponses aléatoires.
[U4.84.04]: Opérateur POST_DYNA_ALEA
[U4.84.01]:: Opérateur COMB_SISM_MODAL
[U4.32.05]: Opérateur INFO_FONCTION
[U4.36.05]: Opérateur GENE_FONC_ALEA
[U4.36.04]: Opérateur GENE_ACCE_SEISME
Description des versions du document#
Version Aster |
Auteur(s) Organisme(s) |
Description des modifications |
11.2 |
I.ZENTNER EDF/R&D/AMA |
Version initiale du document. |
13.1 |
I.ZENTNER EDF/R&D/AMA |
Introduction de la variabilité spatiale: simulation d’un processus vectoriel à partir de la donnée de la DSP et la fonction de cohérence |
Annexe#
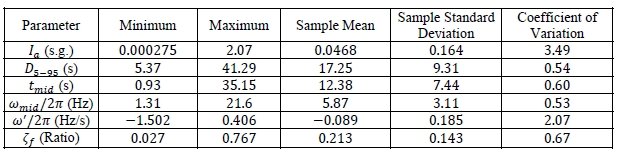
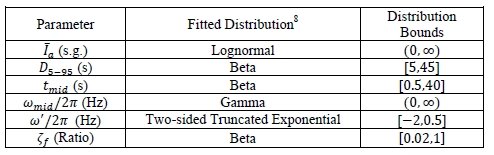
On reproduit ci-dessous des tables du PEER report de Rezaeian & Der Kiureghian ([bib9], p.93-94) où des valeurs moyennes ainsi que les distributions des paramètres du modèle de séisme ont été estimées à partir de la base de données américaine NGA pour une sélection de séismes enregistrés sur sol moyen à dur et \(D>10\mathrm{km}\) .
Légende:
\({I}_{a}\) : intensité Arias; \({D}_{5-95}\) : durée de la phase forte (ici \({T}_{\mathit{SM}}\) ); \({\zeta}_{f}\) : amortissement réduit du filtre (ici \({\xi}_{0}\) ); \({\omega}_{mid}\) : fréquence propre du filtre à l’instant \({t}_{0.45}\) (on travaille ici avec la pulsation \({\omega}_{0}\) à l’instant \({t}_{0.05}\) ); \(\omega '\) : ratio de variation de la fréquence propre du filtre (la pente de la fonction décrivant l’évolution de la pulsation propre du filtre).